传感器测量系统在仿生机器手中的应用
2020-05-27郭炳延
郭炳延
(中国矿业大学,江苏 徐州 221116)
1 测量系统硬件结构
图1 为测量系统硬件原理框图。该测量系统主要由直流源、交流源、电阻应变传感器、电容传感器、NTC 热敏电阻、FPGA、舵机和显示装置组成。电源输出电流,经传感器测量电路后,将模拟信号输入FPGA,通过FPGA 内程序算法,进行高速信号处理,控制舵机转向以及输出显示[1-2]。
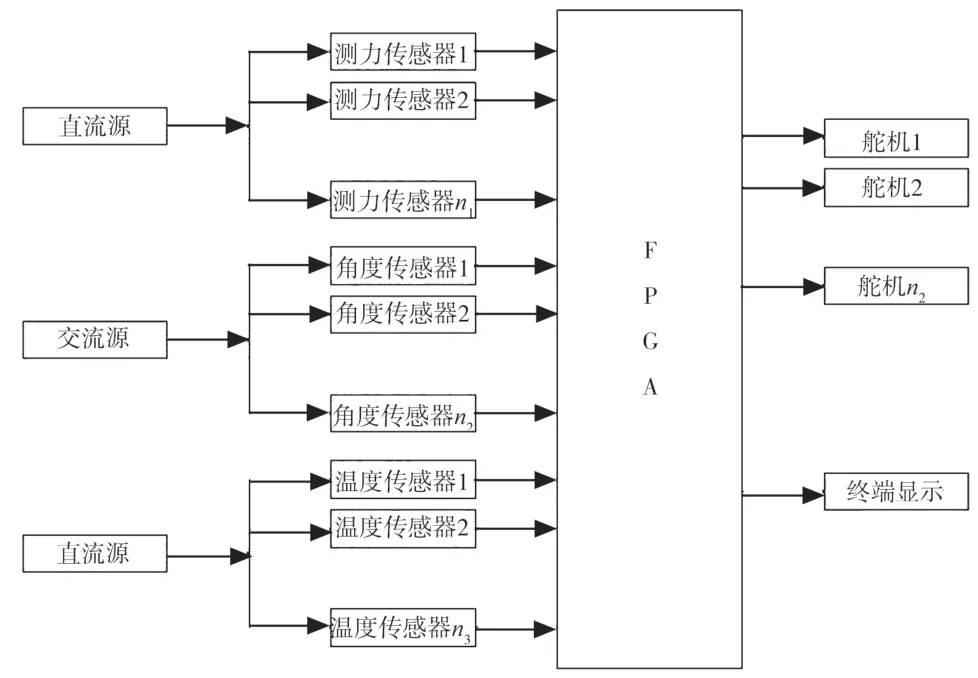
图1 系统硬件原理图
1.1 测力传感器
1.1.1 装置结构
应变片的基底固定在仿生机器手的上下表面里(根据手指大小确定基底个数n1),一个基底上粘有4 个应变片,上面2 片,下面2 片,如图2、图3 所示。
1.1.2 测量转换电路图
将每个基底上的4 片应变片接成全桥差动等臂桥的形式。每个相对臂所接应变片为一组,当受外部力作用时,一组受压一组受拉。应变片差动连接如图4所示。

图2 仿生机械手指骨侧示图

图3 应变片粘贴俯视(仰视)图
1.1.3 工作原理
电阻应变片是将被测量的力通过它产生的金属弹性形变转化为电阻值变化的敏感元件,测量时将应变片粘贴到弹性金属的受力部位上,通过测量电路使输出电压与被测量的力成比例,从而实现对力的检测。
设一根电阻丝未受力时原始电阻值为:

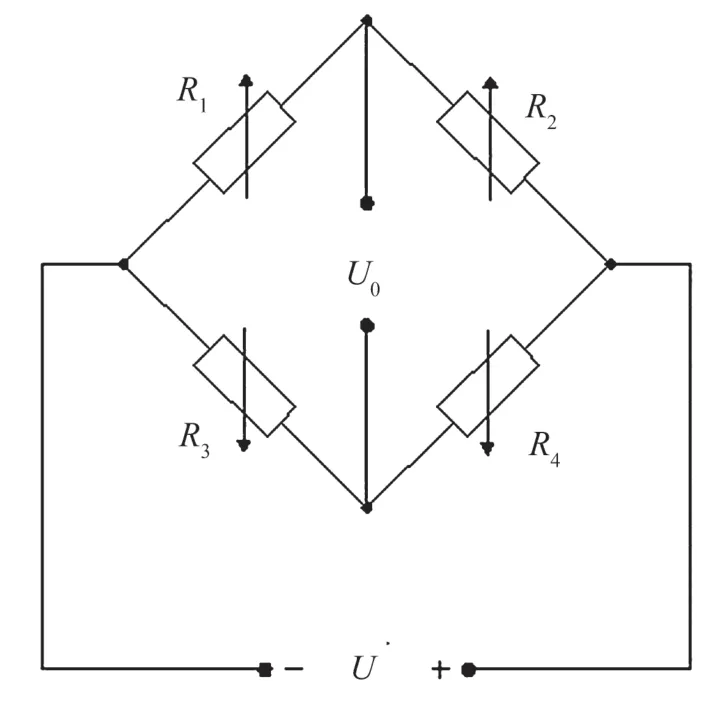
图4 全桥差动连接图
在外力F的作用下,电阻丝的ρ、l、S发生变化,引起电阻变化ΔR,相对变化为:

因为S=π·r2,则截面积ΔS=2πrΔr,相对变化为:

将式(3)代入式(2)可得:

因为半导体应变电阻温度系数较大,非线性严重,故采用金属应变电阻。由于Δρ/ρ很小,可以忽略。根据应力与应变的关系:σ=Eε,进一步推出电阻变化率与应力关系:

在外力的作用下,应变片的电阻发生了变化,破坏了电桥的平衡。若R1、R2、R3、R4分别产生ΔR1、ΔR2、ΔR3、ΔR4的电阻变化。由于满足R1=R2=R3=R4(等臂桥),且ΔR1=-ΔR2=-ΔR3=R4,则电桥输出电压U0为:

由此推出应力与输出电压的关系方程,实现了对力的检测。此外,电压灵敏度KU为:

根据如上公式推导,可以看出测量结果没有非线性误差,并且电压灵敏度较高,由输入电压U决定。此外,通过线路补偿的方法,巧妙消除了温度所引起的系统误差,其中R2、R3为补偿电阻。
1.1.4 工作过程
直流源接入后,测力传感器输出连续的模拟信号,FPGA 进行高速的AD 转换,并通过算法控制舵机与终端显示,从而实现对机器手表面所受力的检测与控制。
1.2 角度传感器
1.2.1 装置结构
图5 为关节主视图,3 个半圆极板和舵机装在关节中,左右半圆极板相对面积为0,舵机轴旋转带动中间半圆极板和上一级指骨,从而可以测量关节的角位移。
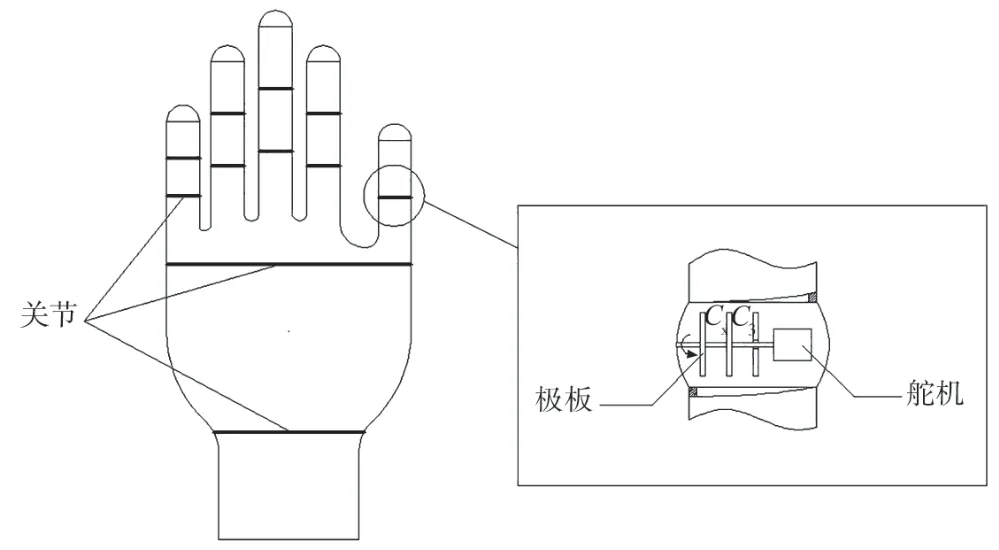
图5 仿生机器手关节主视图
1.2.2 测量转换电路图
当左极板与中间极板相对面积变化ΔS时,右极板与中间极板相对面积变化-ΔS,由可知ΔCx=-ΔC3,即Cx与C3为差动电容。
设C1=C2=Cx=C3=C,电桥平衡,输出U0=0,差动交流等臂电桥连接图如图6 所示。

图6 差动交流电桥连接图
1.2.3 工作原理
这里角度传感器为变面积型电容传感器,是将被测量的角位移通过极板相对面积的改变转化为电容变化。测量时固定一个半圆极板,将另一半圆极板与旋转轴相连,通过测量电路使电容的变化与被测量的角位移成正比,从而实现对力的测量。
在舵机作用下,极板间电容发生变化,破坏了电桥的平衡。若电容Cx产生ΔC的变化,则电容C3产生-ΔC的变化,此时电桥输出电压U0为:


由此实现了对机器手关节角位移的检测。此外,电压灵敏度KU为:

根据如上公式推导,可以看出测量结果没有非线性误差,并且电压灵敏度较高。
1.2.4 工作过程
交流电源接入后,角度传感器输出连续变化的交流信号,FPGA 进行高速的AD 转换,并通过算法控制舵机与终端显示,从而实现对机器手关节角位移的检测与控制。
1.3 温度传感器
1.3.1 装置结构
图2 为仿生机械手指骨侧示图,NTC 热敏电阻位于两个基底之间,紧贴在内部防护皮上,使外部热量可以快速传递到热敏电阻中,从而实时准确反应外部温度。
1.3.2 测量转换电路图
利用一般线路补偿法测量NTC热敏电阻的阻值(温度越高,电阻越小)。
设R1=R2=R3=R4,电桥平衡,输出U0=0,图7 为连接图。
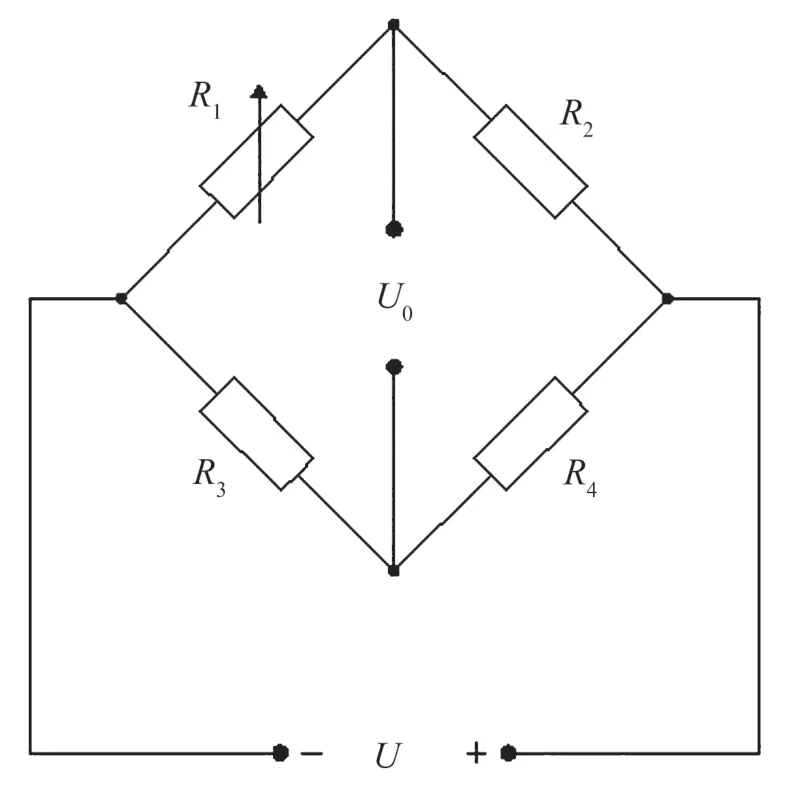
图7 一般线路补偿连接图
1.3.3 工作原理
NTC 热敏电阻具有很高的负温度系数,即温度越高,阻值越小,且具有明显的非线性。测量时将NTC热敏电阻粘贴到仿生机器手的表面里,通过测量电路使输出电压与被测温度成比例关系,从而实现对温度的检测。
外部温度改变时,NTC 热敏电阻阻值改变,电桥平衡被破坏。由电路图可列方程:

因为NTC 热敏电阻阻值与温度呈非线性,所以可以通过查表的方式获得输出电压对应的电阻值所代表的温度,由此实现了对机器手表面温度的检测。此外,电压灵敏度KU为:


可以增大R1以减小非线性误差。
1.3.4 工作过程
直流源接入后,温度传感器输出连续变化的模拟信号,FPGA 进行高速的AD 转换,并通过算法控制舵机与终端显示,从而实现对机器手表面温度的检测与控制。
1.4 FPGA
FPGA 相比于MCU 和DSP 具有高速信号处理、AD 采样率高和更大的并行度等优点,更符合本系统所要求的快速、稳定、准确等高性能。
FPGA 上采用低电压差分信令(LVDS)输入,仅需一个电阻器和一个电容器就能实现模拟输入信号的数字化。由于数百组LVDS 输入驻留在生成电流的FPGA 器件上,因此可通过单个FPGA 芯片实现数百模拟信号的数字化,大大简化外围电路的搭建,实用性高。
2 数据处理
在现实测试的过程中,数据中含有各种误差,产生的原因可能是线路间信号的干扰或是机器抖动带来的噪声。为了获得最可信赖的测量结果,采用最小二乘法拟合数据曲线,使各测量值的残差平方和最小,从而提高测量数据的准确性与可信性。
3 结论
应用电阻应变传感器测量仿生机器手所受的压力,应用电容传感器测量仿生机器手关节的角位移,应用NTC 热敏电阻传感器测量仿生机器手表面的温度,利用FPGA 对测量数据进行处理,可以有效地监测机器手工作状态,为其安全稳定运行起着必不可少的作用。本系统也可以经改进后移植到其他物联网领域。
