可变摩擦力触感移动终端的汉语盲文编码设计
2020-05-25褚少微吉娜烨
张 帆,褚少微,吉娜烨
(浙江传媒学院媒体工程学院,浙江杭州310018)
现行Braille点盲文编码方法是一种应用广泛的盲文编码方案,由法国人Braille 发明。该方法通过在盲文纸上标记凸点(raised dot)来实现文字的编码和摸读。Braille盲文由3行2列的6个盲文点位(position of dot)组成,称为一个盲文方,简称为方(cell)。
现行汉语盲文是以Braille盲文为基础的拼音制盲文体系,其中声母和韵母各采用1 个盲文方来表示。2018 年7 月1 日实施的《国家通用盲文方案》规定:通用盲文沿用现行盲文的声母和韵母,增加声调强制编码,即一般采用3个盲文方编码1个汉字。通用盲文方案摒弃了“一般不标调”规则,解决了阅读盲文时需猜测读音的问题,提高了汉语盲文的表意功能,可为盲文信息化、盲文无障碍交流提供保障,从而大力促进盲文教育、文化事业的发展[1-2]。
笔者拟提出3种基于可变摩擦力触感的移动终端汉语盲文编码方法。利用装有可变摩擦力触感装置的移动终端,参考《国家通用盲文方案》,对汉语盲文进行编码设计,实现汉语盲文的触感摸读,并对盲文编码方法进行优化,使它更适用于移动终端的盲文摸读交互。
本文主要工作包括:
1)提出3种基于可变摩擦力触感的移动终端通用汉语盲文编码方法。
2)提出新的盲文触感摸读交互方式。
3)对所提出的3种编码方法进行摸读效率、摸读准确率和用户满意度的可用性评估。
1 相关研究
在移动终端上表达盲文是一件具有深刻现实意义但又具有挑战性的工作。目前,对盲文表达的研究主要集中在利用振动马达来实现不同盲文信息的编码和交互方法上,如:
Al-Quadah等[3]提出了利用振动韵律对盲文进行摩斯电码编码的方法,可使平均阅读速度达到855 ms/字符。该方法的优点是适用性强,可在带有振动马达的移动终端上应用;但其不足之处在于摸读准确率只有71%,同时需要盲人熟悉摩斯电码的编码方式,学习难度较大,此外由于采用的是被动式触觉感知方式,要求盲人对振动的频率、时长和韵律等有较敏锐的判断,且易产生触感疲劳,用户体验效果不佳。
褚少微等[4-5]提出了通过指尖在屏幕上左右滑动、向右滑动、向下滑动三种盲文触感摸读的交互方式,利用驱动振动马达的振动对盲文进行编码,该方法将盲文的平均识别速度提高到3.62~4.09 s/汉字,3种方式的平均准确率分别达到98.1%,98.1%和96.9%。但是,这些方法的编码方式与现行盲文的空间分布样式区别较大,需要用户进行较长时间的学习和适应。
Jayant等[6]提出了V-Braille方法,该方法采用空间触感编码和振动马达相结合的方式,通过对智能终端屏幕进行区域划分,实现与6点盲文空间位置一一对应。用户指尖在触摸不同区域时,设备会根据盲文点位产生振动反馈,从而实现盲文的摸读。该方法的编码方式与现行盲文在空间分布上相同,而且是基于主动式的触觉反馈,因此易于学习和摸读。然而该方法的缺陷在于字符阅读效率较低,平均需要4.2~26.6 s来感知一个盲文,而且由于只能产生振动和不振动两种状态,所以对于汉字音标来说,需要用额外的盲文来表征。
Rentala等[7]首次提出了利用压电传感器和触屏智能终端相结合的方法来实现盲文触感摸读,基于振动强度、频率和韵律等对盲文点进行编码,用户通过在屏幕上滑动手指来触发屏幕振动,以达到摸读盲文的目的。但此种方法需要对智能终端进行特殊改造,设备成本较高,较难推广,且其平均识别正确率只有70%。
Oliveira 等[8]和Southern 等[9]同样采用屏幕空间划分和振动马达相结合的方式来进行盲文摸读研究,但他们主要关注的是盲文的输入方式。
研究表明,高频率条件下振幅可变的超声震荡波作用在物体表面上即可产生可变滑动摩擦力触感[10-12]。Mullenbach[12-15]等将该原理运用到移动终端的触摸屏上,根据指尖在屏幕位置上的图像纹理样式动态调节超声波振幅,从而改变指尖与屏幕接触面的摩擦系数,实现可编程、可控的可变摩擦力滑动触感的产生,并基于该技术设计了Tpad装置,实验证明该装置能表征很多触感纹理样式。与传统振动马达对比,Tpad装置可为移动终端提供更丰富的纹理触感,使得在移动终端上实现更复杂的信息触感编码。此外,Tpad装置可作为移动终端的一个外接模块,直接装配在现有的智能手机上,通过Type-C 接口与智能手机直接进行通信,不需要对手机进行特殊改造。
可变摩擦力触感通常采用可视化的触感纹理来表征,一般情况下,用黑色触感纹理表征最大强度的摩擦力触感(即屏幕振动幅度为0),用白色触感纹理表征最小强度的摩擦力触感(即屏幕振动幅度最大),用灰度触感纹理表征强度介于最大与最小之间的摩擦力触感。如图1所示,当手指在屏幕上滑动时,可感知不同位置的滑动摩擦力。
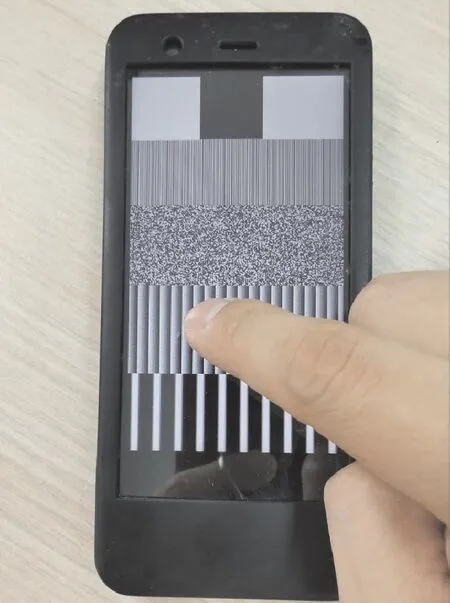
图1 触感纹理感知Fig.1 Tactile texture perception
在文献[16]中,摩擦力触感纹理强度等级分为36个等级,摩擦力最强的等级为35级,摩擦力最小的等级为0级,若2种纹理的摩擦力触感强度对应的等级差超过15级,则它们较易被用户区分。因此,挑选出具有高区分度的条形触感纹理样式,分别为纯白色纹理和黑白条纹宽度为0.2,1.5 和3.2 mm 的条形触感纹理,如图2所示,其摩擦力触感强度等级分别为0,33,16和4级。
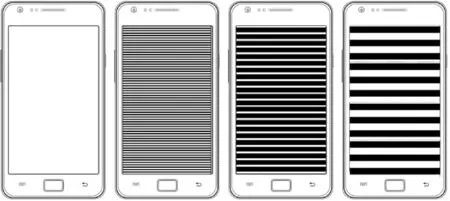
图2 4种区分度高的触感纹理Fig.2 Four highly distinguishable tactile textures
文献[17-18]利用上述条形触感纹理对阿拉伯数字进行了触感编码和相应摸读交互方法的研究,并提出了基于该技术的盲文编码设计准则,结果表明利用TPad装置可进行信息编码,但此种编码方式与现行盲文的编码方法区别较大,交互时间较长。因此,本文仍基于可变摩擦力触感技术,但采用更贴近现行国家通用盲文编码方案的编码方式。
2 汉语盲文的编码方法
利用屏幕分割方式,把1个盲文方呈现在一个屏幕上,即把装有可变摩擦力触感装置的移动终端屏幕划分为左右对称的2 个等分区域(2 列),再把左右2个区域均等分为3行或4行。每个区域代表不同的盲文点位,有触感纹理的区域代表盲文的凸点,白色纹理的区域代表盲文的凹点。具体交互方式为:用户通过手指在屏幕的左侧和右侧滑动来感知屏幕纹理的触感,实现盲文方的识别;当识别完成一个盲文方后,在屏幕右侧快速双击屏幕切换到下一个盲文方;上边界和下边界分别为屏幕的上边框和下边框,如需切换回上一个盲文方,则在屏幕左侧快速双击屏幕。
提出3 种编码方法:第1 种方法是按照《国家通用盲文方案》进行编码,第2种和第3种方法是对第1种方法的改进。
2.1 通用盲文编码方法
《国家通用盲文方案》规定,按照Braille 盲文的标准,汉字的声母、韵母以及声调各用1个盲文方(3行2列)表示。如图3所示,在通用盲文编码方法中,盲文凸点采用黑白相间条形触感纹理表示,条纹宽度为0.2 mm,盲文凹点采用白色触感纹理表示,其中图3(a)为《国家通用盲文方案》中汉语拼音“bian”的编码,图3(b)为对应汉语拼音在屏幕上的盲文触感纹理编码。

图3 基于通用盲文编码方法的“bian”的编码Fig.3 Code of“bian”based on general Braille encoding method
2.2 声调嵌入编码方法
由于汉语拼音有4种音调,使用2个点位,共4种组合来进行声调编码。由韵母的通用盲文编码方案可知,1个韵母至少使用2个凸点,因此可把声调(4种声调)信息嵌入韵母位置上。阴平声调采用宽度为0.2 mm 的黑白相间条形触感纹理;阳平声调采用宽度为1.5 mm 的黑白相间条形纹理,替代表示韵母的盲文方的第1 个凸点;上声声调采用宽度为1.5 mm的黑白相间条形触感纹理,替代表示韵母的盲文方的第1 个凸点和第2 个凸点;去声声调采用宽度为3.2 mm的黑白相间条形触感纹理,替代表示韵母的盲文方的第1个凸点。该编码方式可将原来需要3个盲文方的拼音改用2个盲文方表示。以韵母“ian”为例,如图4所示,从左至右分别表示“ian”的阴平、阳平、上声和去声四个声调。

图4 基于声调嵌入编码方法的“ian”的声调编码Fig.4 Tone code of“ian”based on tone embedding encoding method
2.3 4行2列编码方法
把屏幕平均划分为4 行2 列的8 个区域,前3 行代表标准的Braille 盲文编码,触感纹理仍采用宽度为0.2 mm 的黑白相间条形触感纹理,最后一行的2个点位用于声调编码,采用宽度为1.5 mm 的黑白相间条形触感纹理,称之为声调纹理。其中:阴平声调是在2个声调点位均放置白色纹理;阳平声调是在第1 个声调点位放置1 个声调纹理,在第2 个声调点位放置白色纹理;上声声调是在第1个声调点位放置白色纹理,第2个声调点位放置1个声调纹理;去声声调是在2 个声调点位各放置1 个声调纹理。如图5 所示,从左至右分别表示“ian”的阴平、阳平、上声和去声四个声调。

图5 基于4行2列编码方法的“ian”的声调编码Fig.5 Tone code of“ian”based on four-lines two-columns encoding method
3 编码方法可用性评估
对提出的3种盲文编码方法进行可用性评估,共开展2次系统实验:实验1,分别从摸读效率、摸读准确率以及用户满意度三个方面对本文提出的3种盲文编码方法进行量化测试评估;实验2,挑选出实验1中综合得分最高的方法,与褚少微等[4]提出的基于向右滑动摸读方式的振动马达触觉反馈编码方法进行对比。
3.1 实验1
从摸读效率、摸读准确率以及用户满意度三个方面对通用盲文方案编码方法、声调嵌入编码方法和4行2列编码方法进行可用性量化测试评估。
3.1.1 实验1设备
实验采用客户端/服务器(C/S)架构,1 台搭载Android系统的TPad移动终端作为客户端(屏幕尺寸为4.7英寸(11.938 cm),分辨率为720×1 280像素),1台Android平板电脑作为服务器端,客户端和服务器端通过蓝牙进行网络通信。
服务器端用于生成汉字对应的盲文触感纹理编号并发送到客户端,客户端根据触感纹理编号生成相应盲文触感纹理并呈现在屏幕上,用户用手指在TPad屏幕上滑动并感知相应位置的纹理触感。服务器端根据用户在客户端的摸读时间,实时记录每个汉字的识别时间。
3.1.2 实验1受试者
邀请12 名盲人作为受试者,6 名为男性,6 名为女性,平均年龄为27.6岁(标准差为0.6岁)。所有受试者均有通用盲文摸读经验,但未使用过TPad设备。每位受试者将得到100元的报酬。
3.1.3 实验1过程
将12名受试者随机划分为3组,每个小组4人,每个小组均用3种方法进行测试。为减小实验顺序对实验的影响,采用拉丁方设计(Latin square design)平衡实验顺序。
在实验开始前,实验人员先向受试者介绍实验设备、编码方式以及实验目标,并让受试者在TPad设备上感受和熟悉宽度分别为0.2,1.5,3.2 mm 的黑白相间条形纹理的触感。在测试每种编码方法前,允许受试者对相应编码方法进行练习,熟悉每种编码的触感纹理,练习时间为10~15 min。
实验开始后,服务器端随机生成汉语拼音的触感纹理样式(每种编码方法随机生成10个汉字,每个已选汉字在每种方法测试过程中随机出现3次)并发送至客户端,受试者用手指在TPad屏幕上滑动以感知盲文。在完成识别后,向实验人员读出所识别的拼音,实验人员在服务器端屏幕上选择正确与否,并将它记录在服务器端的日志中。同时,当受试者滑动屏幕进行摸读识别时,客户端会记录受试者开始摸读的时间以及识别完成的时间,并发送至服务器端,保存在日志中,用于计算摸读的交互时间。实验过程中始终保持周围环境安静,并为受试者戴上隔音耳机。实验现场如图6所示。

图6 盲文摸读实验现场Fig.6 Braille reading experiment site
每种编码方法的测试总次数为10×3×12=360次,则3种方法共计测试360×3=1 080次。每个小组的实验过程共持续约50 min,每位受试者在每个方法测试结束后休息5 min。实验结束后受试者在实验人员帮助下填写5分制李克特量表(Likert scale)[19],对3种编码方法进行主观评价。
3.1.4 实验1结果
分别从摸读效率、摸读准确率和用户满意度三个方面对3种编码方法进行可用性评估,其中:摸读效率为每个受试者平均摸读一个汉字所需时间;摸读准确率用于衡量每种编码方法的平均识别正确率;用户满意度用于调查用户对每种编码方法的主观满意度,包括学习难易程度、易用性、舒适度以及整体评价。
1)摸读效率。
图7 所示为3 种编码方法的摸读效率,其中,通用盲文编码方法的平均摸读效率为8.82 s/汉字(标准差为2.31 s/汉字),声调嵌入编码方法的平均摸读效率为4.91 s/汉字(标准差为1.23 s/汉字),4行2列编码方法的平均摸读效率为4.12 s/汉字(标准差为1.11 s/汉字)。根据方差分析结果可得,在摸读效率上,通用盲文编码方法与另外2种编码方法存在显著差异(p<0.01);声调嵌入编码方法和4行2列编码方法没有显著差异(p>0.05)。由此可得,通用盲文编码方法的摸读效率最低,其他2种方法的摸读效率相当。
2)摸读准确率。
图8所示为3种编码方法的摸读准确率,由图可知3种方法都具有较高的平均摸读准确率,分别为:通用盲文编码方法为98.6%(标准差为10.21%),声调嵌入编码方法为96.8%(标准差为12.42%),4行2列编码方法为98.6%(标准差为7.21%)。方差分析得出声调嵌入编码方法与其他2种方法的摸读准确率存在显著差异(p<0.05),即声调嵌入编码方法的准确率较其他2种方法要低。
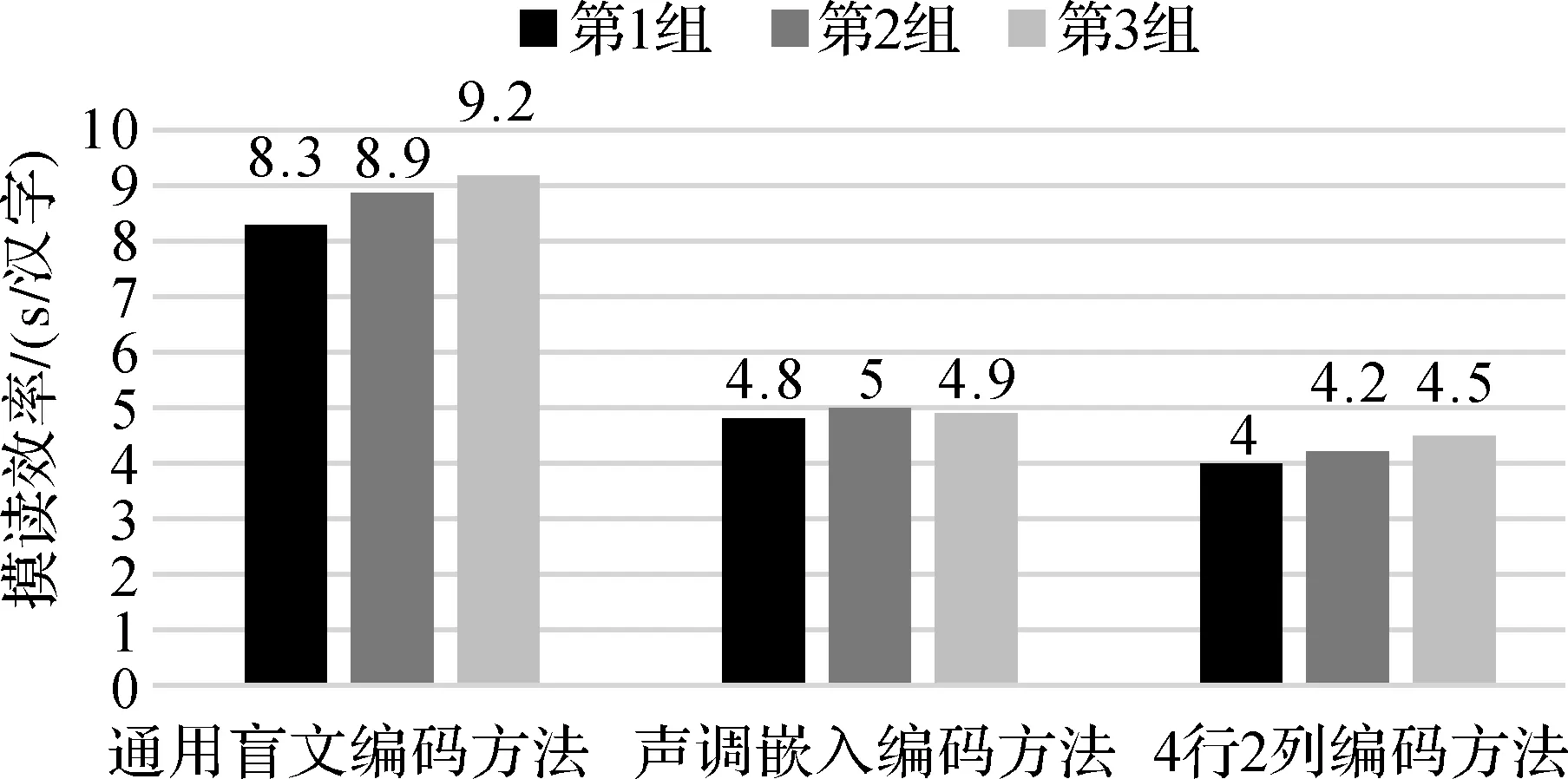
图7 3种编码方法的摸读效率Fig.7 Reading efficiency of three encoding methods

图8 3种编码方法的摸读准确率Fig.8 Reading accuracy of three encoding methods
3)用户满意度。
利用5 分制李克特量表对3 种编码方法进行主观评价,结果如图9所示。

图9 3种编码方法的用户满意度Fig.9 User satisfaction of three encoding methods
由图9可知:
①学习难易程度方面。通用盲文编码方法的得分均值为4.7 分,标准差为0.41 分;声调嵌入编码方法的得分均值为3.2分,标准差为0.73分;4行2列编码方法的得分均值为4.2分,标准差为0.52分。方差分析结果表明通用盲文编码方法与其他2种编码方法在学习难易程度上存在显著差异(p<0.01),即通用盲文编码方法的学习难度最低。
②易用性方面。通用盲文编码方法的得分均值为3.2 分,标准差为0.62 分;声调嵌入编码方法的得分均值为2.9分,标准差为1.13分;4行2列编码方法的得分均值为4.8分,标准差为0.81分。方差分析结果表明,4 行2 列编码方法与其他2 种编码方法在易用性上存在显著差异(p<0.01)。因此,4 行2 列编码方法的易用性最高。
③舒适度方面。通用盲文编码方法的得分均值为4.6 分,标准差为0.91 分;声调嵌入编码方法的得分均值为3.8分,标准差为1.12分;4行2列编码方法的得分均值为4.8分,标准差为0.70分。方差分析结果表明声调嵌入编码方法与其他2种方法在舒适度上存在显著差异(p<0.01)。因此,声调嵌入编码方法的舒适度最低。
④整体评价方面。通用盲文编码方法的得分均值为3.1 分,标准差为0.82 分;声调嵌入编码方法的得分均值为2.9分,标准差为1.23分;4行2列编码方法的得分均值为4.8分,标准差为0.61分。方差分析结果表明,4 行2 列编码方法与其他2 种方法存在显著差异(p<0.01)。由此可以看出,受试者对4行2列编码方法的整体评价优于其他2种方法。
3.1.5 实验1结果讨论
实验1结果表明:通用盲文编码方法的摸读准确率高,学习难度最低,但其摸读效率最低;声调嵌入编码方法的摸读效率高,但其摸读准确率、易用性、舒适性和整体评价偏低,且学习难度较大;4行2列编码方法的摸读效率、摸读准确率、易用性和整体评价最高。
大多数受试者(11/12)认为,通用盲文编码方法的编码方式与现行通用盲文规范一致,学习难度较低,但需要连续摸读3个盲文方,识别效率较低;对于声调嵌入编码方法,需要先熟悉新的编码方式,在同时识别盲文和声调对应的触感纹理的过程中容易混淆,导致舒适度和准确率低;对于4行2列编码方法,虽然它与现行通用盲文规范有所区别,但这种新的编码方式很容易掌握,摸读准确率和舒适度较高。
3.2 实验2
根据实验1的结果挑选出综合得分最高的4行2列编码方法,与基于向右滑动摸读方式的振动马达触觉反馈编码方法进行摸读效率、摸读准确率和用户满意度的比较。如图10所示,基于向右滑动摸读方式的振动马达触觉反馈编码方法把屏幕划分为3行2列(左侧列:盲文点位1,2和3;右侧列:盲文点位4,5和6),每行盲文用一个二等分屏幕触感纹理进行表征;若盲文点位为凸点,则手机产生振动触觉反馈,若该点位为凹点,则手机不产生振动反馈。用户手指在屏幕上从左到右滑动感知第1行至第3行盲文点位的振动反馈。由此可知,在该方法中,1个盲文需要3个触感纹理来表征,同时需进行3次从左到右的滑动摸读操作。

图10 基于向右滑动摸读方式的振动马达触觉反馈编码方法Fig.10 Vibration motor tactile feedback encoding method based on right-sliding touch reading mode
3.2.1 实验2设备
测试4行2列编码方法时采用实验1中的设备;测试振动马达触觉反馈编码方法时使用搭载Android 4.0操作系统,内置柱状振动马达传感器,屏幕大小为4.7 英寸,分辨率为1 280×720 像素的智能手机HTCS720e。
3.2.2 实验2受试者
受试者为实验1的12名受试者。每位受试者将得到100元的报酬。
3.2.3 实验2过程
受试者分别用2种方法进行摸读测试。为减小实验顺序的影响,将受试者分为2组,每组各6位。第1 组先进行4 行2 列编码方法的测试,再进行振动马达触觉反馈编码方法测试;第2组与第1组的测试顺序相反。
由于受试者已经熟悉4行2列编码方法,在进行实验2时,实验人员只需向受试者介绍振动马达触觉反馈编码方法,并给予10~15min的练习时间,以熟悉该方法的编码方式和摸读方式。
采用客户端-服务器端架构进行实验。实验开始后,服务器端随机生成汉字并发送至客户端,客户端根据服务器端生成的汉字进行触感编码。受试者在识别完成后,向实验人员读出所识别的拼音,实验人员在服务器端上选择正确与否,并记录在日志中。同时,当受试者滑动屏幕进行摸读识别时,客户端记录受试者开始摸读的时间以及识别完成的时间,并发送到服务器端,保存在日志中,用于计算摸读的交互时间。实验过程中始终保持周围环境安静,并为受试者戴上隔音耳机。
本实验中,系统每次实验共生成10个汉字,每个汉字在每种方法的测试过程中随机出现3次,因此每种方法的测试总次数为10×3×12=360次。每位受试者测试2种编码方法的实验过程共持续约30 min,每位受试者在每个方法测试结束后休息5 min。实验结束后,受试者在实验人员帮助下填写5分制李克特量表,对2种编码方法进行主观评价。
3.2.4 实验2结果
1)摸读效率。
4行2列编码方法的平均摸读效率为4.05 s/汉字(标准差为1.20 s/汉字),振动马达触觉反馈编码方法的平均摸读效率为4.93 s/汉字(标准差为1.82 s/汉字)。方差分析结果表明2种编码方法的摸读效率存在显著差异(p<0.05)。因此,4 行2 列编码方法比振动马达触觉反馈编码方法具有更高的摸读效率。
2)摸读准确率。
4 行2 列编码方法的平均摸读准确率为98.2%(标准差为6.57%),振动马达触觉反馈编码方法的平均摸读准确率为98.3%(标准差为13.2%)。方差分析结果表明,2种编码方法在摸读准确率上不存在显著差异(p=0.65 >0.05)。因此,这2种方法的摸读准确率都比较高,但从稳定性上看,4行2列编码方法的稳定性更高。
3)用户满意度。
①学习难易程度方面。4行2列编码方法的得分均值为4.3分(标准差为0.76分),振动马达触觉反馈编码方法的得分均值为3.8 分(标准差为0.54 分)。方差分析结果表明2种编码方法在学习难易程度上存在显著差异(p<0.01)。因此,4 行2 列编码方法的学习难度较低。据受试者反映,振动马达触觉反馈编码方法与传统盲文编码方法区别较大,需要一定的时间来学习和熟悉。
②易用性方面。4行2列编码方法的得分均值为4.78分(标准差为0.77分),振动马达触觉反馈编码方法的得分均值为4.69分(标准差为0.69分)。方差分析结果表明2种编码方法在易用性上不存在显著差异(p>0.05)。因此,这2种方法都有较高的易用性。
③舒适度方面。4行2列编码方法的得分均值为4.8分(标准差为0.91分),振动马达触觉反馈编码方法的得分均值为4.05 分(标准差为1.2 分)。方差分析结果表明2种编码方法在舒适度上存在显著差异(p<0.01)。因此,4行2列编码方法的舒适度较高。
④整体评价方面。4行2列编码方法的得分均值为4.8分(标准差为0.58分),振动马达触觉反馈编码方法的得分均值为3.56分(标准差为1.02分)。方差分析结果表明2种编码方法在整体评价上存在显著差异(p<0.01)。因此,4 行2 列编码方法的整体评价较高。据受试者反馈,相较于4行2列编码方法,振动马达触觉反馈编码方法与传统盲文编码方法的区别较大,需要一定时间适应,且在识别时需要进行语义转换。
3.2.5 实验2结果讨论
实验2结果显示:在摸读效率上,与振动马达触觉反馈编码方法相比,4行2列编码方法具有较高的摸读效率;在摸读准确率上,2 种编码方法都有很高的准确率,但4行2列编码方法具有更高的稳定性;在用户满意度上,4行2列编码方法的学习难易程度比振动马达触觉反馈编码方法低,当用户熟悉2种方法之后,其易用程度相当,但用户更倾向于使用4行2列编码方法,这是因为振动马达触觉反馈编码方法与传统盲文编码方法的区别较大,需要一定时间适应,且在识别时需要进行语义转换。
综上所述,相比于基于向右滑动摸读方式的振动马达触觉反馈编码方法,4行2列编码方法具有更强的实用性。
5 结 语
提出了3种基于可变摩擦力触感的移动终端汉语盲文编码方法,分别为通用盲文方案编码方法、声调嵌入编码方法及4行2列编码方法。在装有可变摩擦力触感装置的移动终端上,参考Braille 盲文标准和《国家通用盲文规范》,把触感屏幕划分为3行2列(或4行2列)等分区域,每个区域采用不同的触感纹理来表征盲文的凹凸点。结果表明3种编码方法的平均摸读效率分别为8.82,4.91,4.12 s/汉字;3种编码方法都具有较高的准确率,平均准确率分别为98.6%,96.8%,98.6%;用户对4 行2 列编码方法的整体评价较高。对比4行2列编码方法与基于向右滑动摸读方式的振动马达触觉反馈编码方法发现,4行2列编码方法更优。综上所述,4行2列编码方法更适用于装有可变摩擦力触感装置的移动终端。
但用户反映,此种设备触感偏弱,屏幕尺寸稍大,因此在下一步的工作中将通过优化触感硬件设备来提升触感反馈;同时,将采用尺寸较小的屏幕来提高摸读效率。此外,在今后的研究中,将尝试完成数字、英文字母、标点符号、词语、语句等的编码方法设计和可用性评估。
