“高分七号”卫星遥感影像自动云检测
2020-05-21李俊杰傅俏燕
李俊杰 傅俏燕
“高分七号”卫星遥感影像自动云检测
李俊杰 傅俏燕
(中国资源卫星应用中心,北京 100094)
云是光学卫星遥感影像主要的噪声源之一,会遮蔽或不同程度干扰影像上的地物信息,影像云检测得到的云量和云掩膜对卫星影像的生产和后续的数据分析使用非常重要。文章针对“高分七号”(GF-7)卫星等高分辨率遥感影像的波段特点,提出了一种基于光谱信息和自适应阈值的4波段多光谱影像自动云检测方法。该方法首先对待检测影像进行分块并计算其云指数,然后基于云指数影像上云和地物的差异特性自适应分割得到云区,最后对分块影像拼接并进行形态学处理,得到最终的云量和云掩模。GF-7卫星多光谱影像自动云检测实际应用结果显示,厚云和半透明的薄云识别精度较高,可以比较精确地检测影像上不同类型的云,能够满足海量数据自动化云检测处理的需要。
光学遥感影像 云指数 自动云检测 最大类间方差法“高分七号”卫星 航天遥感
0 引言
在地球轨道上活跃运行的遥感卫星中,光学成像卫星占比超过一半。光学遥感卫星可以快速、大范围地重复获取地表信息,其成像数据广泛应用于国土、环保、农业、军事等领域。不过光学遥感卫星影像常常受限于云的影响,云是光学遥感影像的主要噪声源之一,会不同程度遮蔽地物,影响数据的使用。依据国际卫星云气候项目的通量数据(ISCCP-FD)数据集估计,全球年平均云覆盖率约为66%[1]。在全球范围内,Landsat卫星的ETM+的单景陆地影像的平均云量约为35%[2]。
光学卫星遥感影像的使用分析需尽量避开影像上云的影响。对光学影像进行云检测,提供云量(百分比值)和云掩模(二值图),有利于提高光学影像的利用率,增强使用的便捷性。然而,由于云层和地球表面的光谱变化较大,自动准确地将云层与地表区分开并非易事[3]。
云检测被看作光学影像进行后续识别、分类和解译的关键[4]。国际上使用广泛的MODIS、Landsat和Sentinel-2数据都有业务化运行较为成熟的云检测方法[5-7],很多学者对这些数据的云检测方法也进行了卓有成效的研究[8-11]。上述数据的云检测算法普遍使用了中波红外、热红外和卷云波段,但是相当数量的光学卫星影像缺少中波和热红外波段,一般只有4个可见光谱段(蓝、绿、红和近红外),例如国内的“高分一号”、“高分二号”、“高分七号”、“资源三号”系列光学卫星影像。针对常规的4波段光学遥感影像进行精确的自动云检测具有很大的挑战性,国内外学者提出了较多的云检测方法,主要有四大类:1)利用光谱信息(或图像信息)的固定阈值和动态阈值方法[12]。该方法主要利用云在可见光波段具有很强反射的特性,使用较为广泛,但该类算法对阈值的敏感程度较高,同一卫星数据因时间、天气等原因,检测阈值将发生巨大变化,因此,该类方法的局限性较大[13]。2)使用图像纹理和空间特性检测云的方法[14-15]。纹理方法在缺乏足够光谱信息时普适性好,但云稀疏分布时精度较低[16]。3)基于样本和分类器的模式识别方法[17]。此类方法依赖大量的训练样本和分类器取得好的精度,并且针对不同数据需要重新选取样本。4)综合性方法,前述几种方法的结合使用[13, 18-19],效果不错,但大多依赖先验知识。
针对“高分七号”(GF-7)卫星多光谱影像只有可见光和近红外4个波段,本文提出了一种基于光谱信息和自适应阈值的自动云检测方法,利用云和地物的光谱特性差异,无需依赖预先确定的阈值和先验信息,不用人工干预,自动检测效率较高。经GF-7卫星多光谱影像自动云检实际验证,该方法简单有效,可以对影像上不同类型的云做出比较精确的检测,能够满足海量数据云检测自动化处理的需要。
1 云检测方法
本文提出的云检测方法主要步骤为:1)影像分块和计算分块影像的大气层顶(Top of Atmospheric,TOA)反射率;2)生成云指数影像,利用雾度优化变换指数(Haze Optimized Transform,HOT)和平均反射率指数(Cloud Index,CI)计算公式,得到云指数影像,作为后续自适应阈值分割的基底影像;3)基于云指数影像自适应阈值分割提取云区,首先使用HOT指数影像,基于该影像像元值的直方图统计分位数进行分割得到可能云区,然后在可能云区的CI指数影像上用OTSU(最大类间方差)方法获取阈值,分割得到确定云区,两个关键阈值自动确定的方法详细说明见1.3;4)拼接和云区形态学处理,得到最终的云量和云掩膜(云和晴空区域的二值图,1为云,0为晴空),完成云检测。图1为云检测方法流程框图。

图1 云检测方法流程
1.1 影像分块和TOA反射率计算
待检测单景影像数据分块,每块大小为1 024像元×1 024像元。
云指数的计算需要基于大气层顶反射率,因此首先要计算分块影像的TOA反射率。影像的DN值需转换为辐亮度,以便最大程度地减少仪器辐射校准的变化;然后转换为大气层顶反射率,从而最大程度地减少因日地距离、太阳的高度角和光谱波段不同导致的大气外太阳辐照度差异而引起的遥感变化[20]。
可以使用实验室或外场绝对定标系数把波段的DN值转为辐亮度。GF-7卫星多光谱影像DN值转换为辐亮度的计算公式为
L=(DN–)/(1)
式中L是卫星载荷第波段入瞳处等效辐射亮度;和分别为该波段定标系数增益、偏移量。
计算各波段的大气层顶反射率B
式中B为第波段的大气层顶反射率(无量纲);π为常量;为日地距离(天文单位);E为第波段大气层顶的平均太阳光谱辐照度;为太阳的天顶角。
1.2 云指数HOT和CI影像生成
HOT指数利用GF-7卫星多光谱波段的蓝、红波段来增强云和地物的差异性。文献[21]首次提出了HOT指数的概念,作者认为在晴空条件下,大多数陆地表面的可见光波段高度相关,但是蓝、红波段对雾霾和薄云的光谱响应不同。HOT指数可以用来区分云(薄云和厚云)和晴空像元,但是会包含一些高亮地物像元[3]。
计算分块影像的HOT指数得到HOT指数影像,计算公式为
式中1、3分别表示波段1(蓝)、波段3(红)的大气层顶反射率。
CI指数使用GF-7卫星多光谱的4个波段计算像元的平均反射率来增强云和地物的差异性,云在上述4个波段反射率都高,而地物只是某一个或几个波段反射率高。计算分块影像的CI指数得到CI指数影像,计算公式为

式中2和4分别表示波段2(绿)和波段4(近红外)的大气层顶反射率。
CI影像的值域范围为0~1,为降低后续处理的计算复杂度,将其拉伸到0~255整型值域范围,计算公式为

式中 CIuint8为CI影像拉伸后的值;CImin为CI影像上的最小值;CImax为CI影像上的最大值。
1.3 自适应阈值提取云区域
自适应阈值提取云区域的主要步骤分为3步:
(1)基于HOT指数影像确定可能的云区。
确定可能云覆盖区域的计算公式为
式中 PCloud是可能云覆盖区域的二值矩阵;为阈值(待确定)。
值由该分块HOT指数影像像元值直方图分布统计值的百分位确定,直方图70%处的分位确定的值表示低于该值的像元数占到像元总数的70%。1、2和3分别对应HOT指数影像像元值直方图的三个百分位70%、80%和90%,按以上3个阈值分割分别得到可能云覆盖区域A、B和C。值由每个分块影像像元值的直方图分布统计值百分位数计算得到,每个分块都不一样,但无需预先确定阈值。
(2)对可能的云区CI指数影像采用OTSU方法自动分割得到确定云区。
本步的阈值分割基于上一步的结果,上一步可能云区为二值图,用其去掩模对应CI指数影像,CI指数影像上对应二值图为0的区域被掩模掉,不参与本步的阈值分割(标记为0),参与阈值分割的为可能云区的CI指数影像。
对上述可能云区CI指数影像进行阈值分割得到确定云区,该阈值采用最大类间方差法自动确定。OTSU法是日本学者大津1979年提出的一种自适应的阈值确定方法,通过让背景和目标之间的类间方差最大来确定阈值,将图像分成背景和目标两部分。类间方差的具体公式为

式中2为类间方差;1为前景像素点占待分割区域像素点的比例;1为前景像素点的平均灰度;2为背景像素点占待分割区域像素点的比例;2为背景像素点的平均灰度。
采用遍历的方法找到类间方差的最大值,对应的阈值即为分割图像的阈值。OTSU方法确定云区域的二值矩阵公式为
式中 CloudV1是OTSU法分块影像自适应提取云区的结果,是云掩膜二值图,像元值为1表示云,0为晴空,基于该云掩膜可以计算得到云量。
对A、B和C区域的CI指数影像分别采用OTSU法自动分割确定云区,计算云量;取三者中云量最大值的云量和对应云掩膜作为自适应阈值提取云区域的结果。
(3)晴空和全云的判断处理。
根据上述两步骤得到的结果,如果云量小于0.5%判定为全晴空,该分块二值图的值全设为0;云量大于99.5%判定为全云,该分块二值图的值全设为1。
1.4 分块拼接和云区形态学处理
对1.3节提取的所有分块云区二值影像进行拼接得到待检测影像的云区,然后进行形态学处理得到最终的云检测结果。采用最大最小值滤波的方式,滤波器大小为9像元×9像元。形态学处理的目的主要在于:1)去除误判的高亮地物。某些高亮的目标会被误判为云,例如建筑物、裸地等,利用其尺寸远小于云的特点,通过形态学处理进行消除。2)消除1.3节结果中的噪声(去除孤立像素),并优化调整云的轮廓,填充小面积云缝,使云区趋于连通的整体。
2 云检测结果与评价
2.1 测试数据
2019年11月3日发射的GF-7卫星是我国首颗民用亚米级高分辨率光学传输型立体测绘卫星[22],卫星搭载了双线阵立体相机,其后视相机的多光谱影像有蓝(B1:0.45~0.52µm)、绿(B2:0.52~0.59µm)、红(B3:0.63~0.69µm)和近红外(B4:0.77~0.89µm)4个多光谱波段,空间分辨率优于3m,幅宽优于20km。
本文选择了11景GF-7卫星多光谱影像进行云检测试,选取的数据尽可能包含不同类型的云,有厚云、薄云和碎云,集中云和分散云等;同时覆盖不同地表和地貌类型,包括植被、裸土、沙漠戈壁、人工地表和山区、平原等;另外数据尽可能分散在不同的地理区域,见图2(红色的三角形图标表示测试数据所在的地理位置)。为了定量评价本文的云检测方法,采用人工目视判读影像解译勾画的云区作为参考真值,用来对云检测结果进行评估。
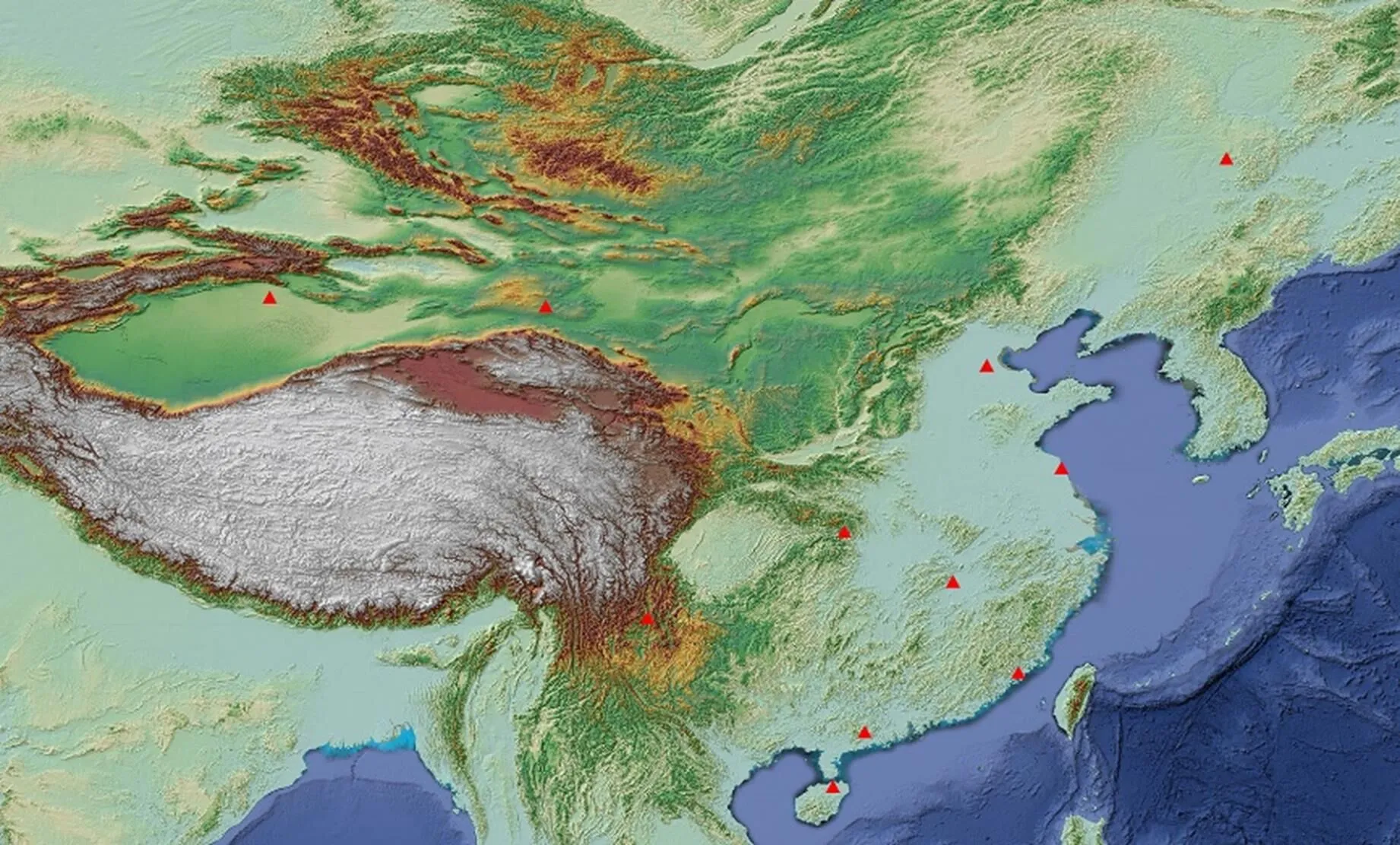
图2 测试数据的地理空间分布
2.2 云检测结果评价与分析
采用本文提出的方法对测试数据进行云检测,使用GDAL库,通过Python编程实现。云检测结果的评价和分析采用定性和定量两种方式进行,参考真值为人工目视判读影像解译勾画的云区。
(1)定性评价
对照原始影像、人工目视判读结果和云检测结果,评价分析云区提取边界精准度以及是否有遗漏和误判。遥感影像上的云可简单分为厚云和薄云(卷云),厚云是指不透明的云,薄云是薄的、半透明的或透明的云。图3为影像云区的参考范围和云检测结果对比示例,总共有6组不同区域示例,图像大小为1024像元×1024像元,每组的左图为原始影像(波段432假彩色合成)和人工目视判读勾画的云区范围(图中黄线),右图为检测结果云区(图中绿色标识)叠加原始影像。
图3示例数据的评价分析如下:1)区域1位于山区,下垫面以人工地表和林地为主,云的形态为厚云,检测结果准确,云区边界较为平滑;2)区域2位于丘陵,下垫面以林地、农田和裸地为主,云的形态为厚云和薄云,厚云和半透明薄云检测准确,但是透明的小薄云有遗漏;3)区域3位于平原,下垫面以人工建筑物和草地、林地为主,云为分散的厚云和薄云,检测结果较准确;4)区域4位于山区,下垫面以林地、水体和裸地为主,云为分散的厚云和薄云,检测结果较准确,小部分透明薄云未检出;5)区域5位于平原,下垫面以农田和水体为主,云以薄云为主几乎覆盖分块影像,检测结果与目视判读有较大差距,厚云和半透明薄云检出,但是部分半透明和透明的薄云未检出;6)区域6位于平原和山地,下垫面以戈壁滩和裸地为主,云为分散分布的厚云和薄云,检测结果较准确,半透薄云和厚云全检出,部分透明薄云未检出,少量高亮地物被误提。
总体而言,云检测结果的厚云和半透明薄云可全检出,边界也较为准确,但是部分薄云特别是透明的薄云存在漏提,另外少量高亮地物也存在误提。
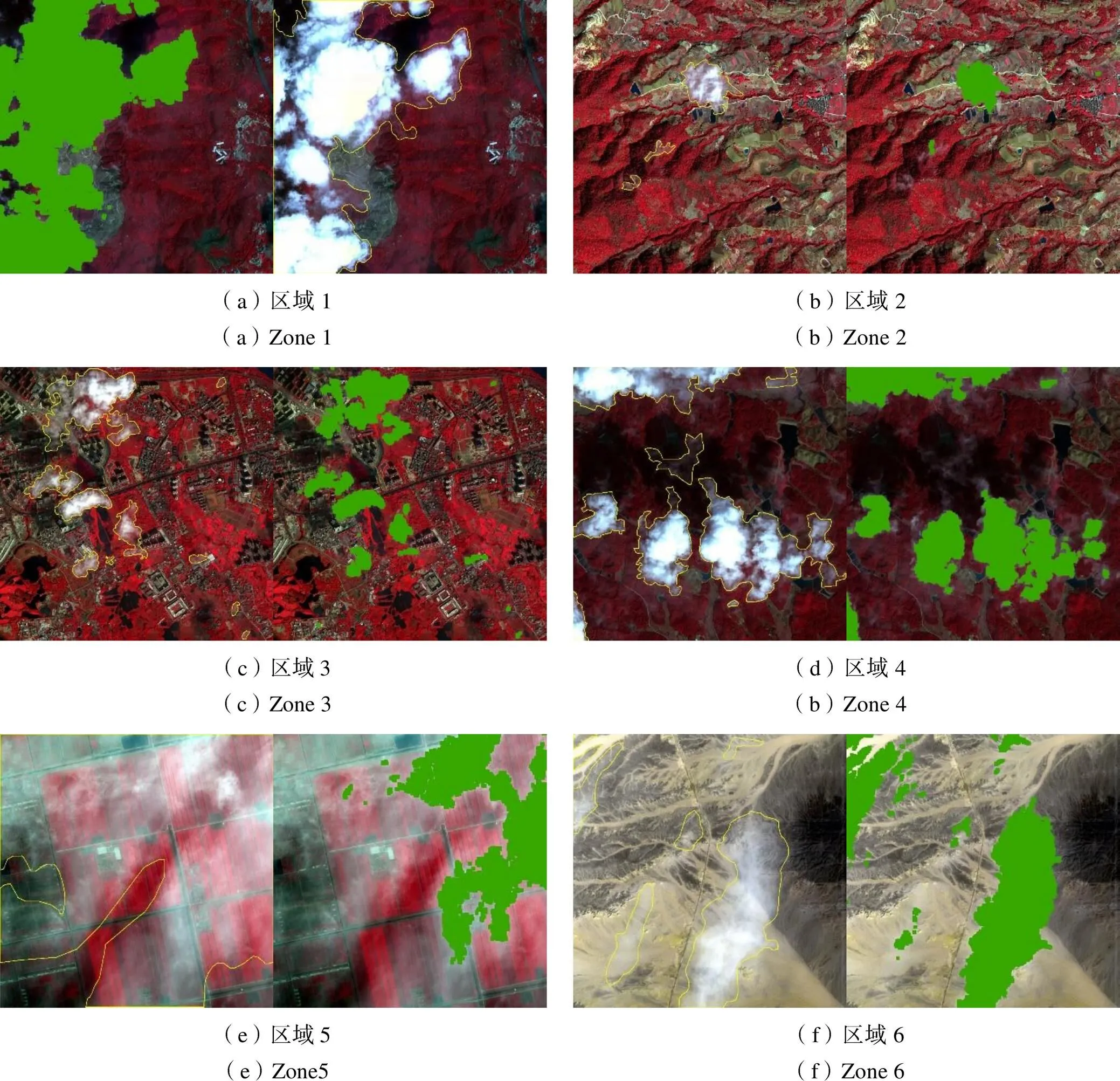
图3 影像云区的参考范围和云检测结果对比示例
(2)定量评价
单景云量作为影像品质和可用性的指标在实际应用中尤为重要,单景云量的准确性可以用来定量评价云检测方法的效果。人工目视判断勾画得到的云量和本文提出的云检测方法的结果云量进行比较,用平均绝对误差(MA)和平均相对误差(MR)作为误差计算的指标,计算公式如下:
其中R()和T()分别表示第幅测试影像的参考云量和检测云量;表示用于精度评估的影像数。11景测试数据计算得到的MA为0.049,MR为0.276,两值均较小。此外,图4将参考云量和检测云量进行了线性拟合分析,可以看出两者有明显的相关性。
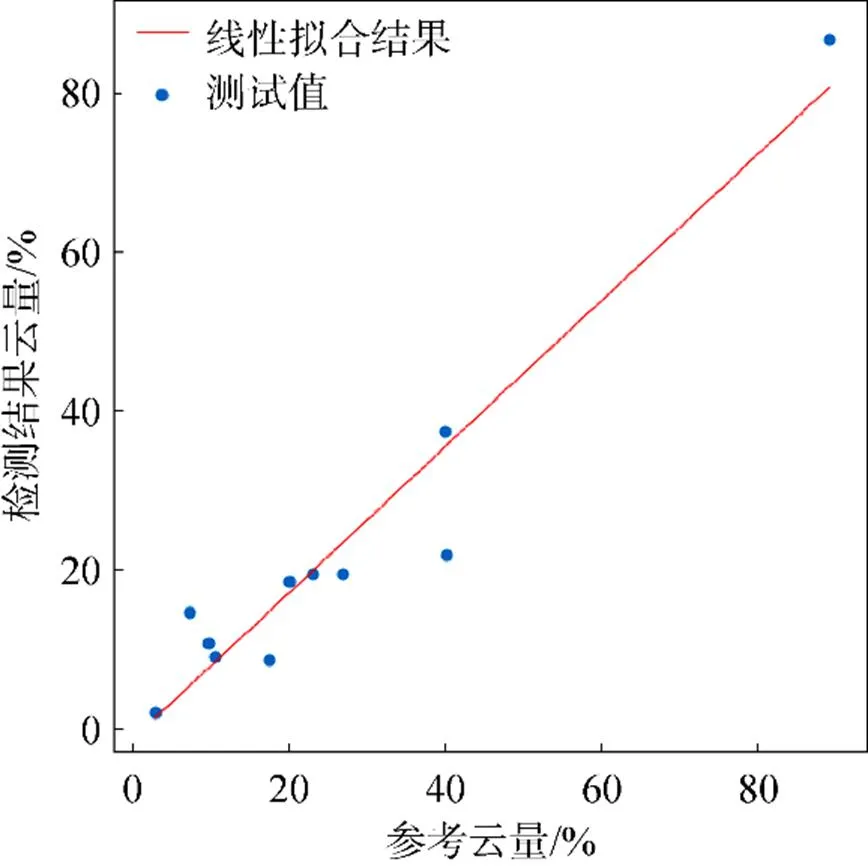
图4 测试数据参考云量和检测云量线性拟合结果
3 结束语
本文提出的云检测方法利用了4波段光学影像上云和地物的光谱差异,通过两种类型的云指数计算增强了云和地物的差异性,两个关键的分割阈值都基于分块影像本身计算确定。“因图而异”自适应地确定阈值,有效避免了阈值过大则薄云漏检、分割阈值过小则误检率过高的问题。该方法用于GF-7卫星多光谱影像的自动云检测,结果表明厚云和半透明的薄云检测准确,效率高,且适应多种不同的情况,可以用于批量化、自动化的云检测。经过简单的调整,该方法也可以扩展用于与GF-7卫星多光谱影像类似的其他光学遥感卫星影像的云检测。
由于下垫面的复杂性,光学遥感影像上透明的薄云检测有难度。对于透明云而言,本方法存在漏检和误检情况,难以精准检测,某些漏分的透明薄云区域可以通过后期的大气校正进行去除。另外,少量高亮地物会被误判为云,特别是下垫面为积雪时容易被误判为云。不过大多数用户在实际应用中,影像上的雪也会被视同为云,对于永久性的积雪可考虑通过土地覆盖先验数据去除。
[1] ZHANG Y C, ROSSOW W B, LACIS A A, et al. Calculation of Radiative Fluxes from the Surface to Top of Atmosphere Based on ISCCP and Other Global Data Sets: Refinements of the Radiative Transfer Model and the Input Data[J]. Journal of Geophysical Research, 2004, 109: D19105.
[2] JU J, ROY D P. The Availability of Cloud-free Landsat ETM+ Data Over the Conterminous United States and Globally[J]. Remote Sensing of Environment, 2008, 112(3): 1196-1211.
[3] ZHU Z, WOODCOCK C E. Object-based Cloud and Cloud Shadow Detection in Landsat Imagery[J]. Remote Sensing of Environment, 2012, 118: 83-94.
[4] 刘紫涵, 吴艳兰. 遥感图像云检测方法研究进展[J]. 国土资源遥感, 2017, 29(4): 6-12. LIU Zihan, WU Yanlan. A Review of Cloud Detection Methods in Remote Sensing Images[J]. Remote Sensing for Land and Resources, 2017, 29(4): 6-12. (in Chinese)
[5] ACKERMAN S, STRABALA K, MENZWL P, et al. Discriminating Clear-sky from Cloud with MODIS Algorithm Theoretical Basis Document (MOD35)[R/OL]. [2020-03-21]. https://modis-images.gsfc.nasa.gov/_docs/MOD35_ATBD_ Collection6.pdf.
[6] IRISH R R, BARKER J L, GOWARD S N, et al. Characterization of the Landsat-7 ETM+ Automated Cloud-cover Assessment (ACCA) Algorithm[J]. Photogrammetric Engineering & Remote Sensing, 2006, 72(10): 1179-1188.
[7] RICHTER R, LOUIS J, MULLER W U. Sentinel-2 MSI-Level 2A Products Algorithm Theoretical Basis Document[R/OL]. [2020-03-21]. http://step.esa.int/thirdparties/sen2cor/2.3.0/[L2A-ATBD]%20S2PAD-ATBD-0001%20[2.0].pdf.
[8] ACKERMAN S A, HOLZ R E, FREY R, et al. Cloud Detection with MODIS. Part II: Validation[J]. Journal of Atmospheric and Oceanic Technology, 2008, 25(7): 1073-1086.
[9] FREY R A, ACKERMAN S A, LIU Y, et al. Cloud Detection with MODIS. Part I: Improvements in the MODIS Cloud Mask for Collection 5[J]. Journal of Atmospheric and Oceanic Technology, 2008, 25(7): 1057-1072.
[10] ZHU Z, WANG S, WOODCOCK C E. Improvement and Expansion of the Fmask Algorithm: Cloud, Cloud Shadow, and Snow Detection for Landsats 4-7, 8, and Sentinel 2 Images[J]. Remote Sensing of Environment, 2015, 119: 269-277.
[11] HAGOLLE O, HUC M, PASCUAL D V, et al. A Multi-temporal Method for Cloud Detection, Applied to FORMOSAT-2, VENμS, LANDSAT and SENTINEL-2 Images[J]. Remote Sensing of Environment, 2010, 114(8): 1747-1755.
[12] 钟静, 康一飞, 韩昱, 等. 高分一号卫星影像自动云检测[J]. 地理空间信息, 2018, 16 (4): 52-55. ZHONG Jing, KANG Yifei, HAN Yu, et al. Automatic Cloud Detection of GF-1 Satellite Imagery[J]. Geospatial Information, 2018, 16(4): 52-55. (in Chinese)
[13] 谭凯, 张永军, 童心, 等. 国产高分辨率遥感卫星影像自动云检测[J]. 测绘学报, 2016, 45(5): 581-591. TAN Kai, ZHANG Yongjun, TONG Xin, et al. Automatic Cloud Detection for Chinese High Resolution Remote Sensing Satellite Imagery[J]. Acta Geodaetica et Cartographica Sinica, 2016, 45(5): 581-591. (in Chinese)
[14] 贾亮亮, 汪小钦, 王峰. 基于波段运算和纹理特征的高分一号多光谱数据云检测[J]. 遥感信息, 2018, 33(5): 66-72. JIA Liangliang, WANG Xiaoqin, WANG Feng. Cloud Detection Based on Band Operation Texture Feature for GF-1 Multispectral Data[J]. Remote Sensing Information, 2018, 33(5): 66-72. (in Chinese)
[15] 陈振炜, 张过, 宁津生, 等. 资源三号测绘卫星自动云检测[J]. 测绘学报, 2015, 44(3): 292-300. CHEN Zhenwei, ZHANG Guo, NING Jinsheng, et al. An Automatic Cloud Detection Method for ZY-3 Satellite[J]. Acta Geodaetica et Cartographica Sinica, 2015, 44(3): 292-300. (in Chinese)
[16] 侯舒维, 孙文方, 郑小松. 遥感图像云检测方法综述[J]. 空间电子技术, 2014(3): 68-76. HOU Shuwei, SUN Wenfang, ZHENG Xiaosong. Overview of Cloud Detection Methods in Remote Sensing Images[J]. Space Electronic Technology, 2014(3): 68-76. (in Chinese)
[17] 陈洋, 范荣双, 王竞雪, 等. 基于深度学习的资源三号卫星遥感影像云检测方法[J]. 光学学报, 2018, 38(1): 354-359. CHEN Yang, FAN Rongshuang, WANG Jingxue, et al. Cloud Detection of ZY-3 Satellite Remote Sensing Images Based on Deep Learning[J]. Acta Optica Sinica, 2018, 38(1): 354-359. (in Chinese)
[18] 王权, 孙林, 韦晶, 等. 动态阈值云检测算法改进及在高分辨率卫星上的应用[J]. 光学学报, 2018, 38(10): 376-385. WANG Quan, SUN Lin, WEI Jing, et al. Improvement of Universal Dynamic Threshold Cloud Detection Algorithm and Its Application in High Resolution Satellite[J]. Acta Optica Sinica, 2018, 38(10): 376-385. (in Chinese)
[19] LI Z, SHEN H, LI H , et al. Multi-feature Combined Cloud and Cloud Shadow Detection in GF-1 WFV Imagery[J]. Remote Sensing of Environment, 2016, 191: 342-358.
[20] CHANDER G, HUANG Chengquan, YANG Limin, et al. Developing Consistent Landsat Data Sets for Large Area Applications: The MRLC 2001 Protocol[J]. IEEE Geoscience and Remote Sensing Letters, 2009, 6(4): 777-781.
[21] ZHANG Y, GUINDON B, CIHLAR J. An Image Transform to Characterize and Compensate for Spatial Variations in Thin Cloud Contamination of Landsat Images[J]. Remote Sensing of Environment, 2002, 82(2/3): 173-187.
[22] 李庆勤. “长征四号”B运载火箭成功发射“高分七号”卫星[J]. 中国航天, 2019(11): 23. LI Qinqing. Long March 4B Carrier Rocket Successfully Launches GF-7 Satellite[J]. Aerospace China, 2019(11): 23. (in Chinese)
Automatic Cloud Detection of GF-7 Satellite Imagery
LI Junjie FU Qiaoyan
(China Centre for Resources Satellite Data and Application, Beijing 100094, China)
Cloud is one of the main noise sources of optical satellite remote sensing image, which would block or interfere with the ground feature information to different degree, the cloud amount and cloud mask obtained from cloud image detection are very important for the production of satellite imagery and subsequent data analysis.Aiming at the band characteristics of high resolution remote sensing images such as GF-7 satellite, this paper proposes an automatic cloud detection method for 4-band multispectral images based on spectral information and adaptive threshold. This method first divides the to-be-detected image into blocks and calculates its cloud index, and then adaptively segments the cloud area based on the difference characteristics of clouds and ground features on the cloud index image, and finally stitches the block images and performs morphological processing to obtain the final cloud amount and cloud mask. This method is used for automatic cloud detection of GF-7 satellite multispectral image. The results show that the method can detect different types of clouds on the image more accurately, especially with high recognition accuracy for thick clouds and semi-transparent thin clouds, thus meeting the needs of automated cloud detection processing of massive data.
optical remote sensing image; cloud index; automatic cloud detection; OTSU method; GF-7 satellite; space remote sensing
P237
A
1009-8518(2020)02-0108-08
10.3969/j.issn.1009-8518.2020.02.012
李俊杰,男,1983年生,2007年获中国科学院研究生院人文地理学专业硕士学位,高级工程师。研究方向为遥感数据处理与信息提取。E-mail:lijunjie299@126.com。
2020-03-10
国家重点研发计划资助(2018YFB0505000)
李俊杰, 傅俏燕. “高分七号”卫星遥感影像自动云检测[J]. 航天返回与遥感, 2020, 41(2): 108-115.
LI Junjie, FU Qiaoyan. Automatic Cloud Detection of GF-7 Satellite Imagery[J]. Spacecraft Recovery & Remote Sensing, 2020, 41(2): 108-115. (in Chinese)
(编辑:夏淑密)