工程机械机群一体化施工关键技术研究
2020-05-20
(山推工程机械股份有限公司,山东 济宁 272000)
1 前言
传统的施工模式存在施工精确度低,对操作手依赖性大,不能实时监控过程,容易造成过度施工,反复施工,夜间施工难度大,效率低等缺陷,大大限制了设备的生产力,像高尔夫球场、专用的试车跑道、机场跑道路基等需要特殊工艺或设计要求的,传统施工技术已不能满足。
基于传统施工的这些不足,机群一体化施工应运而生,如图1 所示。工程机械制造业是中国制造业的重要组成部分,目前,稍具规模的工程机械制造商都提出了一体化施工的理念,将一体化施工方案及机群联动控制作为企业重要的战略规划。

图1 一体化施工方案示意图
2 机群一体化施工关键技术研究
工程机械机群一体化施工是指为完成某一工程施工项目,以工程数字化为基础,以实现最优工作效率、最佳工作质量为目标的同步协调、智能调度各类设备。施工前,首先把工程数据生成三维数字地形模型,通过GPS 等测量定位,计算实际位置和方向,与设计值比较,并把校正信息输出到云端,云端对操作手及设备进行调整,让机器引导人来施工,工地数字模型呈现如图2 所示。然后根据工程现场勘查,确定地形,立地条件等实际情况,安排合理的机械设备进行施工。一体化施工不再使用一款无人驾驶产品,而是需要工程机械智能施工机群,通过外部施工环境监测,统一的控制平台,同时完成推土机、压路机、挖掘机等不同设备同时施工,互不干扰且相互协作。一体化施工从作业形态上讲要求精准高效作业,从机群控制系统上讲要求和谐作业、有序作业、高效作业,这是很大的技术难关,需掌握以下关键技术。
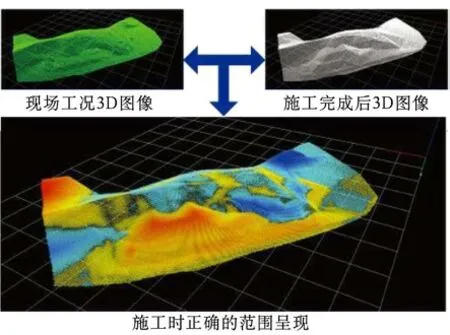
图2 一体化施工工地数字模型呈现
2.1 执行机构运动轨迹控制
要准确找到机械设备和作业对象的相互关系,需要对执行机构进行运动轨迹控制,而轨迹控制需要实现作业精准、位置精准及行走精准。
2.1.1 作业精准
要想实现工程机械设备作业精准,需要我们从根本上解决运动执行机构“三环控制”即速度环控制、位置环控制和加速度环控制。这对工程机械液压系统也提出了很高的要求,每个液压轴将从开环控制进入伺服闭环控制且各轴从独立控制进入多轴统筹解耦控制,即液压系统采用适合的控制规律来消除系统中各个控制回路之间的相对耦合关系,使每一个输入只对应一个输出,每一个输出又只受到一个控制,来满足液压系统多变量控制。例如,推土机铲刀的姿态控制,施工时铲刀一铲完成精确施工,不用人工二次修补,这样可以节省大量的人力、时间,提高设备的工作效率。
如图3 所示,挖掘机底部找平控制,完全可以实现在电子围栏下自动挖掘,实现该挖的地方保证精确的挖好(底部自动找平挖掘),不该挖的地方一定不挖。实现作业精准需要工程机械设备安装多个独立的互不干扰的电子控制系统,按6 个自由度(6DOF)的控制模式实现挖掘机铲斗的轨迹控制和推土机铲刀的姿态控制,如图4、图5 所示。
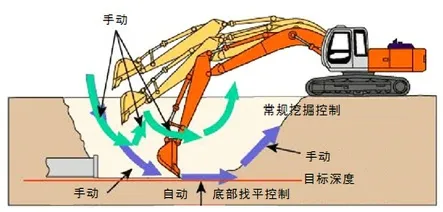
图3 挖掘机底部找平控制

图4 推土机铲刀的6DOF控制
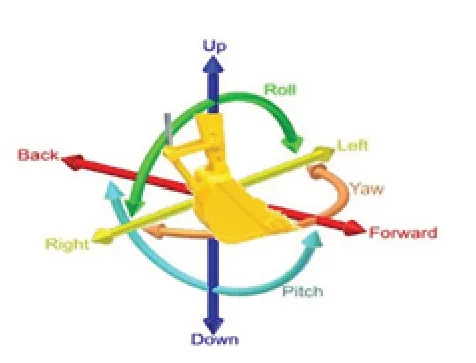
图5 挖掘机铲斗的6DOF控制
2.1.2 行走精准
工程机械行走系统将逐渐从开环控制进入到闭环控制、再到伺服控制。要让工程机械实现各种功能的精确控制,提高作业效率,工程机械设备行走时必须要解决巡航速度的问题,如果工程机械设备工作时不能恒速行走,作业精准将很难实现,所以精准作业的前提一定是设备行走的恒速,这就对变速箱提出了很高的要求。
目前,可不断变速的机械式无级变速箱(CVT)已经在汽车行业上得到了应用和推广,而无限变速式机械无级变速箱(IVT)国外发展非常快,国内目前还是空白,图6 所示为国外简易的IVT 变速箱,因此应加快工程机械传统变速箱向CVT 及IVT 变速箱切换,以实现工程机械定速巡航。

图6 简易IVT变速箱
2.1.3 位置精准
工程机械执行结构位置的精确定位需要高精度的定位系统,目前我国的北斗定位系统完全可以达到目标精确定位,但是GPS 定位系统是有限定位,这就需要5G 技术,5G 最主要的特点是实时性,可以满足行走机械执行机构的实时控制,同样,数据传输安全性高,可以实现“云—地”同步控制,也可以实现“云—雾”端控制,如图7 所示,在5G环境下也可以方便实现“数字孪生”(其中包括3D 定位、运动解耦运算、主要参数的输入与输出等)。
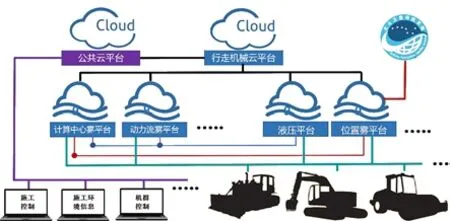
图7 “云—雾”端控制原理图
2.2 机群信息智能化云平台
国外企业像卡特彼勒、小松,国内企业如三一、徐工都有自己的智能化平台,这些平台只能实现本企业产品的信息智能化、设备运行状况掌控,实现同一企业产品一体化施工和集群控制,但是针对同一工地上不同厂家的设备,因企业间市场竞争还无法实现一体化施工。设备精准定位在上述文章中已经提出解决方案,但是如何把这些数据共享到同一个网络里,这就需要建立新的网络云平台,这个云平台可以控制各种设备,把各种需要的数据都放在平台上,如图8 所示,区域控制器是需要各工程机械制造商开发,而云平台必须是由第三方来开发,这是机群一体化施工最需攻克的技术难点。
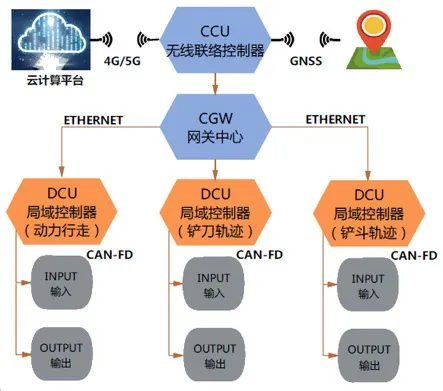
图8 机群信息智能化云平台
2.3 机群健康管理控制平台
机群一体化施工控制系统就像人体各个器官在大脑控制下完成各项行为动作一样,人体健康状况分为健康、亚健康及病态三种,同样一体化施工系统的健康管理也可以分为三种。
例如,液压系统是否“健康”主要跟油有关,机群液压系统也需要检验液压油的主要参数。目前微型传感器及软件工程的高速发展,完全可以做到油液健康监测。但是这里存在一个监测标准的问题,监测出油液污染了,机群是否需要立即停止工作,所以在监测结果显示中除了健康(绿灯)、病态(红灯),还应该存在一个亚健康(黄灯),黄灯控制需要专家数据库给出在监测出液压系统黄灯多少小时后需要进行液压系统保养维护。
因此,需要建立一个机群一体施工健康管理平台,实时监测系统中各种机群的“健康”状况,这对提高机群作业效率很有必要。
3 总结
将来工程机械施工平台将是一个开放的平台,机群一体化施工将会是工程机械发展的主流,所需要的技术除了执行机构运动轨迹控制、机群信息智能化管理以及机群健康管理以外,还需要红外勘测技术、激光技术、智能视频影像技术等,这是一个复杂而庞大的技术体系。一体化施工技术成熟以后将会在新能源的背景下开展工程机械一体化施工,逐步实现“中国制造2025”规划。
