一种校准编目定轨初始速度的方法1)
2020-05-18王秀红李俊峰何雨帆李海晶
王秀红 崔 文 李俊峰 何雨帆 李海晶
∗(西安卫星测控中心,西安710043)
†(清华大学航天航空学院,北京100084)
随着人类对空间开发和利用需求的提高、航天活动不断增多,空间目标日益增长,对在轨航天器的安全运行造成了严重威胁[1-2]。因此,对空间目标进行有效地探测、编目、预报,掌握其运动规律,必要时对有碰撞风险的航天器进行轨道机动规避已成为各航天大国保证在轨航天器安全运行的重要手段之一[3-4]。影响碰撞预警结果置信度的关键因素之一是两个接近目标的轨道确定及预报精度[5],目标的轨道精度主要取决于空间目标的监测能力及大批量目标的编目定轨方法。
相对于在轨航天器测控,大批量空间目标的编目定轨具有特殊性,由于空间目标数量多,而相应的监测资源有限,导致测轨数据稀疏[6];且具有多目标跟踪能力的相控阵雷达测轨精度远比单脉冲雷达测轨精度低;对于新发现目标,只有单站单弧段测量数据,存在定轨系统可观性差、迭代很难收敛的情况[7]等,导致空间目标的编目轨道确定情况复杂、难度大[8-9]。因此,如何在有限的监测资源下,利用稀疏测轨数据,提高大批量空间目标的编目定轨及预报精度一直是空间目标监视的重大难题。
针对该问题,国内外学者在提高轨道动力学模型方面做了相关研究。其中,Lyon[10]研究了提高同步轨道目标辐射压摄动模型的方法,文献[11-13]主要在如何提高目标大气阻尼系数、弹道系数方面开展了研究。轨道预报过程是一个对轨道初值的积分问题,引起轨道预报误差包含动力学模型误差和初值误差两部分。对于低轨道目标,模型误差对轨道预报的影响远大于轨道初值误差,对于轨道高度大于600 km的空间目标,其轨道初值误差对预报的影响更大[14]。本文分析了不同轨道类型的编目轨道预报误差演化特性,理论推导并验证了编目定轨结果对轨道预报误差前后影响的近似对称性,基于此提出了一种校准编目定轨初始速度的方法。
1 轨道预报误差特性分析
空间目标轨道问题包括轨道观测、轨道确定和轨道预报三个方面。由于各种不可避免的因素,这三个方面都可能存在误差。误差来源包括测量误差,模型误差,方法误差等等。
1.1 轨道预报误差评估方法
由于空间目标的真实位置是无法获取的, 因此精确的轨道精度评价是难以实现的,只能通过一些行之有效的方式对轨道的相对精度进行评价。一般而言,定轨精度将比预报精度高得多,可以将定轨结果作为基准来标定预报精度。
为了直观地体现出各摄动力对轨道预报误差的影响,本文将轨道误差投影到径向(R方向)、迹向(T方向)、法向(N方向),分析预报误差变化规律。其中,径向是地心指向空间目标质心的方向;迹向是轨道面内与径向垂直并指向空间目标运动方向,法向垂直轨道平面,与径向、迹向构成右手系[15]。
1.2 轨道预报误差演化特性分析
引起轨道预报误差的初始误差即定轨误差,主要取决测量数据的精度、数据分布、定轨方法、定轨策略及空间环境等相关参数的精度,模型误差主要取决于目标所受到的各种摄动力的模型精化程度。空间目标在轨运行时会受到各种作用力的影响,大批量目标编目方法考虑的动力学摄动项中,除大气阻力摄动外,其他摄动力已经具有十分成熟的精化模型,其模型误差对轨道预报的影响基本可以忽略;大气阻力是典型的非保守力,截止目前几乎所有大气密度模式在太阳平静期存在约15%的模式误差(太阳活动剧烈时误差更大),这将导致大气阻力摄动具有同样的不确定性,并给低轨空间目标轨道预报带来巨大的影响。
本文通过大量统计分析了不同轨道类型目标采用不同测轨数据的编目定轨结果及轨道预报位置误差变化规律。根据分析结果,利用单弧段光学或者相控阵雷达测轨数据定轨结果中,速度误差量级大于位置误差。由于样本数量过多,本文仅给出了NORAD编号分别为40311、33321目标的TLE预报14 天的位置、速度误差变化曲线,分别见图1 和图2,目标的轨道信息见表1。
对预报结果进行分析,可以总结出以下结论:
(1)轨道预报位置误差主要集中在沿迹方向,随时间平方快速发散。
(2)轨道的径向预报位置误差也随时间平方发散(相对沿迹方向发散较慢),并且也在一定程度上产生了模型系统差;
(3)轨道法向位置误差比较小,大部分在百米左右的量级,且服从零均值分布;
(4)轨道高度越低,随着预报时长增大,误差在R方向、T方向误差发散情况越严重;
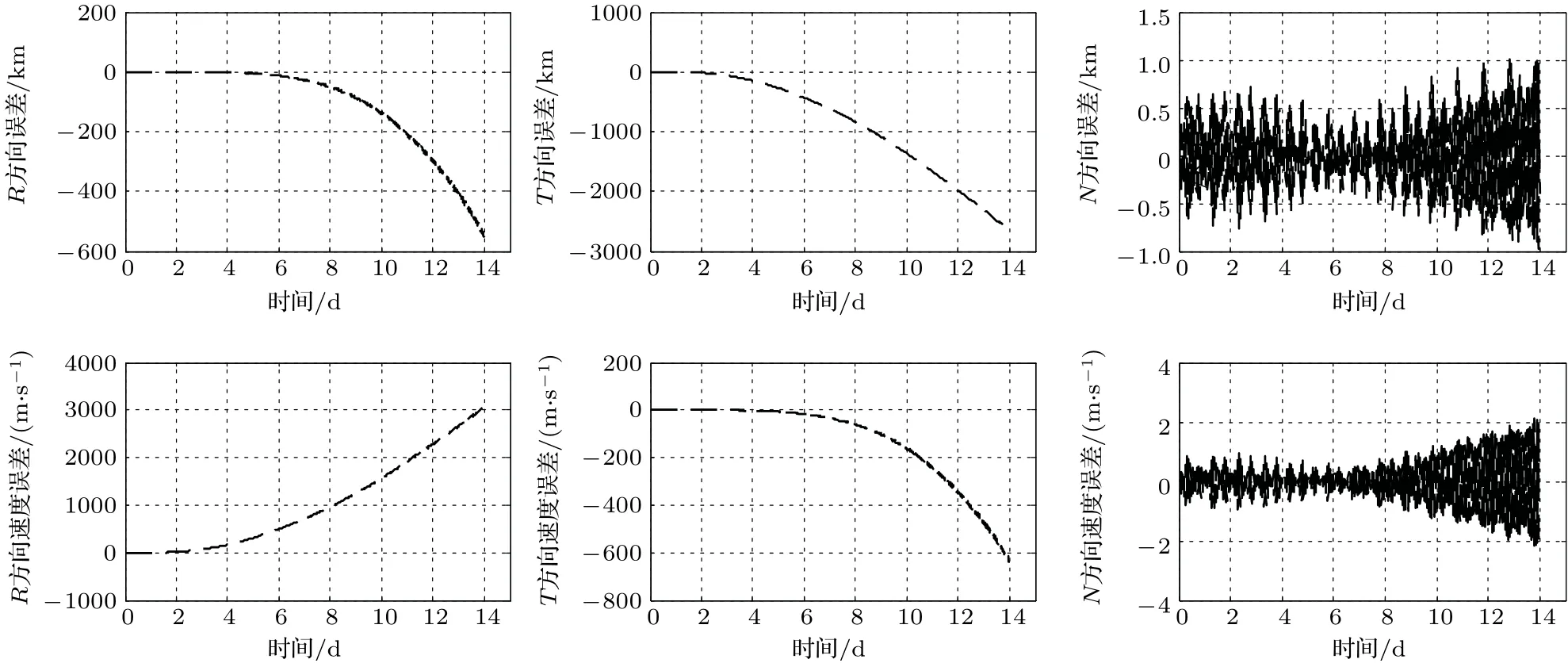
图1 40311 目标TLE 预报14 天位置速度误差

图2 33321 目标TLE 预报14 天位置速度误差

表1 所选目标轨道信息
(5)速度误差在径向的分量大于其他两个方向;
(6)∆R与∆˙T,∆N与∆˙N发散趋势相似,∆T与∆˙R发散趋势相反。
经分析,对于近圆轨道目标,沿迹误差主要是由大气阻力摄动模型误差和初始径向速度误差引起的,轨道高度越低,大气摄动影响越大;径向误差主要来源于地球形状摄动和初始沿迹方向速度误差的影响,表现为径向误差的短周期变化,因而轨道高度越低,发散情况越严重;法向误差主要由地球形状摄动、太阳光压摄动和初始法向速度误差引起,但总体量级很小[5]。
2 轨道误差传播对称性分析及验证
2.1 理论分析
在空间目标轨道估值中,初值误差的传播满足传播方程[16]

式中,Φ(t,t0)为状态转移矩阵,若只求解目标的位置、速度,则Φ为6×6矩阵。x0和x分别为t0和t时刻的状态向量的误差,将误差传播方程在t0时刻一阶近似泰勒展开,则有

其中∆t=t −t0,即

相对于预报的位置误差,初值位置误差是小量,若忽略t0时刻目标的位置误差,则式(3)可简化为
将Φ写成分块矩阵

其中Φ1,Φ2,Φ3,Φ4为3×3矩阵,则由式(4),位置误差的传播方程为

式(6)右边第一项为初始位置误差对预报位置误差的影响,第二项为初始速度误差对预报位置误差的影响。由式(6)可见,由轨道初始位置、速度误差向前、向后传播导致的位置误差均具有近似对称性。当初始速度误差对预报的影响远大于初始位置误差影响时,式(6) 可进一步简化为

2.2 正确性验证
本文利用仿真数据对上述理论进行了验证分析。由于轨道模型误差与初始误差相互耦合,因此,轨道预报误差分析是一个复杂的问题。为了简化分析,仿真分析时一般将轨道预报的初始误差和模型误差进行分解,在分析初始误差时,认为轨道预报模型是准确的,没有模型误差,得到初始误差的传播特性;在分析模型误差时,取相同的初始状态,用不同的模型进行轨道预报以对比其结果。选取了一颗轨道高度800 km左右的空间目标,根据目前定轨精度,添加了80 m的初始位置误差,0.1 m/s的速度误差,采用简易数值法,分别向前、向后预报7 天,其在R,T,N三个方向的位置误差分别见图3和图4。其中,向前向后预报的定义为:设∆t=t−t0,当∆t >0 时,利用t0时刻的轨道预报到t时刻,为向后预报,反之,为向前预报。由图3和图4可见,预报位置误差主要分布在迹向,预报误差远大于初始位置误差,二者相比,初始位置误差可以忽略不计,所以2.1节假设成立;且由初值引起的向前、向后轨道预报误差量级相当,变化趋势一致,近似对称。

图3 添加轨道误差向前预报7 天位置误差在R,T,N 方向分量

图4 添加轨道误差向后预报7 天位置误差在R,T,N 方向分量
另外,根据1.2节分析结果,引起轨道预报迹向误差的主要因素除目标初始速度误差外,动力学模型也是关键因素之一,因此本节分析了该目标动力学模型误差对其轨道预报的影响。图5 给出了该目标添加15%的大气摄动模型误差后预报7 天位置误差变化曲线。对比图4 和图5 可见,对于800 km 轨道高度的同一目标,按照目前的编目定轨和动力学模型精度,对于轨道预报,初始轨道的误差影响远大于动力学模型影响。某些情况下,由于测轨数据的原因,编目定轨的误差更大,其对轨道预报的影响更明显。

图5 添加动力学模型误差向后预报7 天位置误差在R,T,N 方向分量
3 校准定轨速度的方法
3.1 基本思路
根据上述分析结果,初始速度误差向前、向后预报引起的位置误差近似对称,而实际应用中,向前时刻目标的轨道能够利用历史观测数据确定,且位置精度较高,由此联想通过减小向前预报目标的位置误差来修正初值速度误差,从而提高轨道向后预报精度。
3.2 计算方法
本方法的基本思想类似于轨道求解中的Lambert 问题,即已知空间目标P1 和P2 点的位置矢量分别为r1和r2,时间为t1和t2(或相对时间为∆t),求通过P1 和P2 两点的飞行轨迹。但和Lambert 问题相比,经典Lambert 问题的解只是在二体意义下给出的(最多考虑了地球非球形引力的J2项),而空间目标在轨运行中会受到空间各种摄动力的影响,为了尽可能提高轨道精度,本文考虑了简易数值编目定轨方法中使用的动力学模型,此处姑且称为精确动力学模型。
本方法中,假设t2>t1,r1和r2均在J2000 惯性坐标系[16]。文献[15] 研究了目标位置误差和速度误差的相关性,满足式(8)。

式中,a,e,i,Ω,ω,M为t时刻空间目标的轨道六根数;∆a,∆e,∆i,∆Ω,∆ω,∆M表示其对应的轨道根数误差;r,˙r为t时刻空间目标的位置和速度矢量,表示其对应的误差矢量∆˙N表示∆˙r在R,T,N坐标系中的投影。µ为地心引力常数为目标的平均运动角速度;f为目标的真近点角[16];u=ω+f;p=a(1−e2)。
本方法的具体步骤如下:
(1)给定目标t1和t2时刻的位置矢量r1和r2;
(2)利用Lambert 问题的求解方法[17],得到t2时刻的速度v2;
(3)以r2和为初值,应用精确动力学模型向前进行轨道外推到t1时刻,得到
(4)将r1和转换为Kepler根数σ1和求解
(5)利用式(8)和步骤(4)计算的σ1和∆σ,分别计算的修正量,得到修正后的速度并将其转换到J2000 惯性坐标系,得到
(6)以r1和为初值,应用精确动力学模型向后进行轨道外推到t2时刻,得到
(7)重复(3)∼(6)步骤,直到时,迭代结束,其中i为迭代次数,一般情况下。输出t2时刻目标的位置速度其中,与r2相比,变化量很小。
如果已知目标的初始粗略速度,省略步骤(2),但在某些情况下,当初始速度误差很大,甚至导致目标“钻地”,需利用步骤(2)求解t2时刻的速度。
3.3 利用实测轨道验证及结果分析
本节针对不同轨道类型的空间目标,采用不同类型测轨数据的定轨结果,对本文提出的校正速度的方法进行了验证。根据验证结果,该方法对轨道高于600 km 的近圆轨道目标修正效果明显。表2 给出了9 组验证结果,其中修正百分比=(修正前误差-修正后误差)/修正前误差。由表可见,应用该方法,对减缓轨道预报位置误差效果明显,最小修正百分比近50%。

表2 校准初始速度后的轨道预报误差统计结果表
4 结论
针对空间目标编目管理中,利用稀疏数据编目定轨结果误差较大的难题,本文分析了不同轨道类型目标误差演化规律,论证了轨道初始速度对位置误差前后传播的近似对称性,提出了一种校准编目定轨初始速度的方法。
利用实际轨道验证可知,对于600 km高度以上的近圆轨道目标,该方法能够有效校准利用稀疏测轨数据定轨结果的速度误差,抑制位置误差在迹向的发散,从而提高轨道预报精度。
