合成孔径雷达极化成像解译识别技术的进展与展望
2020-05-18王雪松陈思伟
王雪松 陈思伟
(国防科技大学电子科学学院电子信息系统复杂电磁环境效应国家重点实验室 长沙 410073)
1 引言
随着雷达探测环境的复杂化、应用领域的多样化,对目标物理参数反演、分类识别等都提出了越来越高的要求[1]。在此推动下,具备全极化测量能力的极化合成孔径雷达(Synthetic Aperture Radar,SAR)应运而生,并在对地观测、灾害遥感、海洋遥感、侦察监视等领域成为主流传感器,得到越来越广泛的应用[2-8]。
极化SAR能够获取目标的全极化信息,使得对目标极化散射机理进行完整刻画成为可能。极化目标分解是解译目标散射机理的重要方法,其突出优点在于解译结果通常具有明晰的物理意义。由于分解得到的散射机理直接与目标的物理属性和电磁散射过程相联系,极化目标分解方法得到国内外学者的广泛关注,属于极化SAR目标散射解译的研究前沿。另一方面,雷达目标的散射特性与姿态、成像视角等密切相关,通常呈现散射的多样性。目标散射多样性给散射机理的建模和解译带来了极大地挑战,也是近年来极化目标分解方法发展的内在驱动力。与此同时,目标散射多样性也蕴含了表征目标属性的丰富信息。对目标的散射多样性进行有效挖掘和利用,能够给目标散射机理解译与应用带来新的研究思路[8-12],近年来也得到研究人员的高度重视[13-15]。
当前,越来越多的先进极化SAR系统相继研制成功并投入使用。典型星载极化SAR有加拿大的Radarsat-2/3、日本的ALOS-1/2、中国的高分三号等。与此同时,极化SAR系统正朝着多频段、多模式、超高分辨等方向快速发展。例如,德国的机载F-SAR多波段极化SAR系统的成像分辨率可达亚米级。这不仅为极化SAR应用提供了更为精细的数据,也对目标机理建模、散射解译、参数反演和分类识别等信息处理提出了更高的要求[16]。
本文简要总结近年来极化SAR成像解译与识别方面的研究进展。在目标散射机理解译方面,主要介绍基于特征值分解和基于散射模型为代表的非相干极化目标分解,以及极化旋转域解译等理论方法的研究进展[8-11,17,18]。在此基础上,结合我们近年来在极化SAR信息处理方面的实践,介绍这些极化解译方法在目标检测、地物分类和建筑物损毁评估等领域的实际应用。最后,对极化SAR机理解译与应用的发展进行简要展望。
2 极化SAR目标解译识别研究进展
2.1 极化矩阵及旋转处理
在水平和垂直极化基(H,V)下,极化SAR获取的目标全极化信息可以由极化散射矩阵表征

其中,SVH是水平极化发射,垂直极化接收的后向散射系数。其它项类似定义。
将极化散射矩阵沿雷达视线进行旋转,就可以得到极化旋转域中的极化散射矩阵,为

其中,上标T表示转置。θ为旋转角,θ∈[−π,π)。旋转矩阵为R2(θ)=,下标“2”指矩阵的维度。
满足互易性假设条件(SHV=SVH)时,可以得到在极化SAR信息处理中常用的极化相干矩阵,为

其中,kP=为Pauli散射矢量,上标H表示共轭转置。是集合平均处理。Tij是T的(i,j)元素。
将极化相干矩阵拓展到极化旋转域,可得

其中,旋转矩阵为R3(θ)=。
2.2 极化目标分解的研究进展
极化SAR通过收发极化状态正交的电磁波,能够获取目标的全极化信息。通过对目标电磁散射特性的建模与分析,能够更准确地理解目标极化散射机理,有助于准确反演目标物理参数。极化目标分解理论在近年不断发展,成为极化SAR散射机理解译的主流理论工具,并广泛应用于参数反演、目标分类、极化校准、人造目标刻画等领域,为定量遥感奠定了基础[18-22]。
极化目标分解可以分为相干分解和非相干分解两大类。相干分解主要基于极化散射矩阵,代表性方法有Krogager分解[23]和Cameron分解[24]及其系列改进方法[25-27]等,重点应用于空中和地面人造目标解译。由于可供建模的参数有限,且散射模型主要来源于球体、平板、二面角、偶极子、螺旋散射体等确定性散射体,相干分解的原理和方法已经相对成熟,近年来鲜见新进展。相比于相干分解,非相干分解方法更适用于大场景的地物分析,近年来得到持续发展和应用。非相干分解主要基于极化相干矩阵和极化协方差矩阵,包含基于特征值分解的极化目标分解和基于散射模型的极化目标分解两类,下面分别介绍其基本原理和主要研究进展。
2.2.1 基于特征值分解的极化目标分解方法
对极化相干矩阵等二阶统计量进行特征值分解,阐释各特征值和特征矢量的内在联系与物理意义,是基于特征值分解的极化目标分解理论的核心思想。代表性方法为Cloude-Pottier分解[28],其表达式为

其中,Σ为对角阵,包含极化相干矩阵T的3个特征值λi,i=1,2,3。U为酉矩阵,包含极化相干矩阵T的3个特征矢量ui。对特征矢量ui进行参数化表征,可以得到

这样,利用对应的特征值和特征矢量构建的正交基,就可以将极化相干矩阵T分解为相互正交的3个矩阵,为
Cloude和Pottier从式(7)中导出了一系列特征参数对地物散射特性进行解译和理解。其中,最常用的3个极化特征如下:
(1)极化熵H
在一个散射单元内,通常包含多个具有不同散射类型的散射体。极化熵的提出就是为了描述这些不同散射体在统计上的随机程度,定义为
极化熵H取值范围为[0,1],如果极化熵H取值较低(H<0.3),则认为该散射单元的去极化效应较弱,因而可以提取主散射机理。如果极化熵取值较大,则在一个散射单元内混合存在具有不同散射类型的散射体。随着极化熵取值的进一步增大,观测数据中散射机理类别的可区分度随之降低。当取极值H=1时,观测数据完全为随机噪声,无法提取有用的极化信息。
(2)极化反熵A(又称为极化各向异性度)
极化反熵A是极化熵H的一个补充参数,主要考察较小的两个特征值参数之间的相对大小。将特征值参数降序排列λ1≥λ2≥λ3>0,则极化反熵A的定义为

通常,当极化熵H >0.7时,可以利用极化反熵进一步区分散射体的散射类型。当极化熵取值较小时,第2和第3特征值通常取值较小并受噪声影响较大,此时得到的极化反熵参数也是严重受噪声污染的。

Cloude-Pottier分解在极化SAR地物分类领域得到了十分广泛地应用[8,20,29]。与此同时,研究人员也从统计分析[30]、多视影响[31]、极化相干[32]等角度对Cloude-Pottier分解方法进行了更为深入地研究和改进。
此外,基于特征值分解的解译思路也得到研究人员的高度重视。近年来,其它有代表性的基于特征值分解的方法主要有Touzi分解[33]和Paladini分解[34]。其中,Touzi进一步对分解得到的特征矢量进行解译,提出了一系列旋转不变极化特征参数用于地物刻画,并成功用于湿地信息提取[33]。Paladini等研究人员从圆极化基极化矩阵的表征入手,发展了基于特征值分解的信息无损和完备的极化目标分解算法[34],并用于极化SAR和极化ISAR目标分类。
总体而言,基于特征值分解的目标分解方法具有明确的数学背景,通常能够得到唯一的分解结果,其发展也相对成熟。
2.2.2 基于散射模型的极化目标分解方法
基于散射模型的极化目标分解的核心思想是将散射体的散射机理分解为偶次散射(二面角散射或者二次散射)、奇次散射(平板散射或者面散射)、体散射和螺旋散射等基本散射分量,通过分析各基本散射分量的能量等物理参量,解译散射体的散射机理。这种极化分解理论直接基于基本散射模型,分解结果具有明确的物理意义,得到了广泛应用[18,35]。
Freeman-Durden分解是该领域的先驱工作[36]。该方法在散射对称性假设下,将极化协方差矩阵/极化相干矩阵分解为二次散射、奇次散射和体散射机理,进而用于地物散射特性的解译与分析。以极化相干矩阵T为例,Freeman-Durden分解的表达式为

其中,Tvol,Tdbl和Todd分别为体散射、二次散射和奇次散射模型。fv,fd和fs为对应的模型系数。
具体而言,Freeman-Durden分解中用到的体散射、二次散射和奇次散射模型分别为
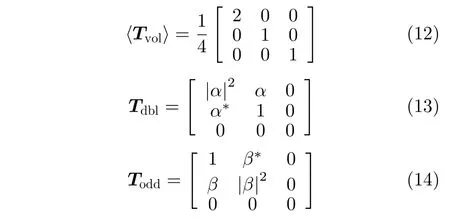
其中,α和β为二次散射和奇次散射模型的参数。
从式(11)—式(14)可以看到,Freeman-Durden分解中,只有体散射模型具有交叉极化分量(即T33分量)。这样在模型求解中,首先求取体散射模型系数,并将体散射分量从原始极化相干矩阵中减掉。然后,根据二次散射和奇次散射判决准则(即硬判决条件),再依次求取其模型参数和系数,完成模型参数反演。从上述求解步骤可以看到,体散射模型具有最高的优先级。不论任何目标,只要其极化相干矩阵中交叉极化分量T33不为0,则必定有体散射机理。上述隐含的假设条件和求解顺序通常会导致体散射机理的过估计,并可能使剩余的二次散射/奇次散射分量出现负能量情形,违背物理原理。此外,在Freeman-Durden分解中,由于引入了散射对称性假设,极化相干矩阵的T13和T23分量没有被用于散射机理建模,极化信息利用不够充分。
针对上述问题,特别是从2010年以来,基于散射模型的极化目标分解成为成像雷达目标极化散射解译领域的研究热点,并取得一系列新进展。2014年,笔者受邀在《IEEE Signal Processing Magazine》的“Recent Advances in Radar Imaging”专刊上发表介绍成像雷达目标极化散射建模与解译的长篇综述[18],对部分研究进展进行了总结。在此基础上,并结合近年来国内外最新研究成果,将这些主要研究进展归纳为以下7个方面,并进行梳理总结。
(1)增加散射分量
Freeman-Durden分解是三分量分解方法。考虑到实测数据中人造目标和大部分自然地物并不满足散射对称性假设,Yamaguchi等研究人员[37]于2005年引入了螺旋散射分量,并建立了四分量分解方法。螺旋散射分量具有旋转不变性,适于描述散射非对称情形。因此,这一方法有效克服了散射对称性假设。以极化相干矩阵进行表征,得到的螺旋散射模型为

2018年,为了利用极化相干矩阵的T13分量,Gulab和Yamaguchi[38]提出了一种六分量分解方法。该方法的核心是提出了两种分别基于不同取向的偶极子和四分之一波器件的混合散射模型。这两种混合散射模型能够分别利用上T13分量的实部和虚部。在此基础上,Gulab和Yamaguchi等研究人员[39]进一步提出一种混合散射模型,用于利用极化相干矩阵中T23分量的实部,并构建了一种七分量分解方法。然而,值得指出的是,这些混合散射模型通常与实际目标缺乏明确的对应关系,难以有效用于实际目标的极化散射分析。此外,相比于不断增加散射分量的思路,构建更加精细化的散射模型或许更值得推崇。
(2)非负特征值约束准则
在Freeman-Durden三分量分解求解过程中,体散射分量首先求解并从原始极化相干矩阵中减掉。由于Freeman-Durden分解方法采用的是不具有交叉极化能量的传统二次散射模型式(13)和奇次散射模型式(14),上述处理方法通常会导致体散射机理过估计,进而在后续模型求解时产生负能量现象。针对这一问题,2011年,van Zyl等研究人员[40]在保留传统模型基础上,引入了非负特征值约束准则,有效避免了负能量现象,其表达式如下

(3)方位向补偿处理(又称去取向处理)
极化方位角是描述电磁波极化状态的一个重要参数。在极化SAR成像模式下,沿飞行航迹起伏的地表和方位向与飞行航迹有夹角的建筑物(简称倾斜排列建筑物)都会在散射入射波时引起极化基的变化,从而引起极化方位角偏移。因此,通过分析极化方位角的变化,就可以提取地形起伏和建筑物方位向等特征信息。极化方位角可以通过旋转极化相干矩阵使交叉极化分量最小而得到,为[43]

其中,Re(T23)为T23的实部。可以看到,θ角参数的主值区间为[−π/4,π/4]。
将式(17)代入式(4),可以完成极化相干矩阵的方位向补偿处理。2010年起,方位向补偿处理作为极化相干矩阵的预处理步骤,被引入Freeman-Durden三分量和Yamaguchi四分量等目标分解方法[22,44,45]。由于这些目标分解方法均采用了传统二次散射模型式(13)和奇次散射模型式(14),即隐含假设二次散射和奇次散射不产生交叉极化项T33。这样,给定体散射模型后,体散射分量的能量主要由交叉极化项T33来确定。方位向补偿处理使得T33最小化,则可有效缓解体散射分量的过估计,改善极化目标分解性能。可以看到,方位向补偿处理并没有增加散射模型的机理刻画能力。同时,极化方位角为分辨单元内所有散射体的平均极化方位角。对一些具有较大极化方位角的人造目标区域,结合方位向补偿处理的传统极化目标分解方法仍面临局限性。因此,研究并建立具有更好机理刻画能力的精细化散射模型得到国内外研究人员更为广泛的重视。
(4)精细化的体散射模型
Freeman-Durden分解方法最早是用于自然地物(如森林等)的散射机理分析与信息提取。因此,构建精细化的体散射模型最先得到研究人员的重视,并在相当长一个时期内成为这一领域的主要研究方向。
体散射分量通常由一簇取向随机的基本散射体Tvol(θ)进行描述。当基本散射体取向角θ满足概率密度函数p(θ)时,通过积分就可以得到体散射模型

其中,模型参数a,b和c是实数,d,e和f是复数。
当p(θ)为均匀分布时,得到的模型即为Freeman-Durden分解中的体散射模型式(12)。考虑到森林(如针叶林、阔叶林等)等植被区域,其枝叶分布通常具有一定的取向性。通过构建具有针对性的概率密度函数p(θ),则有望得到更加精细的体散射模型。2005年,Yamaguchi四分量分解[37]中提出了一种截断型正弦概率分布,对水平和垂直偶极子可以得到额外两个体散射模型。在此之后,为了使体散射模型更加精细和准确,研究人员也相继提出了一些其他的概率分布用于体散射建模[46-48]。其中,文献[46]提出利用von Mises分布来刻画植被的冠层。文献[47]引入了n次余弦平方函数的概率分布。该分布主要由取向角均值和表面粗糙度参数进行描述。此外,基于多视数据相位差的分布函数,文献[48]提出了一系列的模型用于匹配不同的方位角分布。然而,正如文献[47]也指出,目前并没有理论依据判断哪种概率分布描述方式更好。因此,其它的概率分布函数也是可以采用的。
(5)精细化的二次和奇次散射模型为了更细致地描述不同森林地物的散射特性,近年来国际上诸多学者主要专注于精细化体散射模型的研究[46,47]。相对而言,对表征建筑物等人造目标的精细化散射模型的研究较少。传统方法假设二次散射和奇次散射等描述人造目标的模型没有交叉极化分量,无法描述人造目标通过极化基变换而引入的交叉极化能量,这是传统方法存在解译性能不足的本质原因之一。当前,对人造目标(如建筑物、车辆等)的成像和解译是极化SAR侦察、遥感领域的研究重点。基于物理散射模型的极化目标分解是常用的解译方法。由于散射模型自身的局限,结合方位向补偿处理的传统极化目标分解方法仍难以从本质上刻画倾斜排列建筑物等人造目标产生的交叉极化分量。当目标极化方位角较大时,机理误判问题依然严重。2013年,文献[43]研究揭示了传统基于模型的目标分解方法在解译人造目标时的性能极限,即:当人造目标极化方位角绝对值>π/8时,传统方法将产生机理误判,且随极化方位角增大而增大[43]。
在此基础上,2014年,文献[17]提出了精细化的二次和奇次散射模型。二次散射分量通常由二面角散射体结构(如“墙体-地面”)进行建模。不同的散射面可以由具有不同介电常数的材料构成。为有效表征倾斜排列建筑物等人造目标形成的二面角结构,通过引入表征二次散射取向角的旋转角参数θdbl,可得到精细化二次散射模型[17]

其中,Tdbl为传统二次散射模型。
奇次散射模型通常由面散射机理表征。对具有较小粗糙度的Bragg面散射,交叉极化分量通常可以忽略。为描述起伏地表通过极化基旋转变换引入较为显著交叉极化分量的情形,通过引入表征面散射取向角的旋转角参数θodd,可得到精细化奇次散射模型[17]
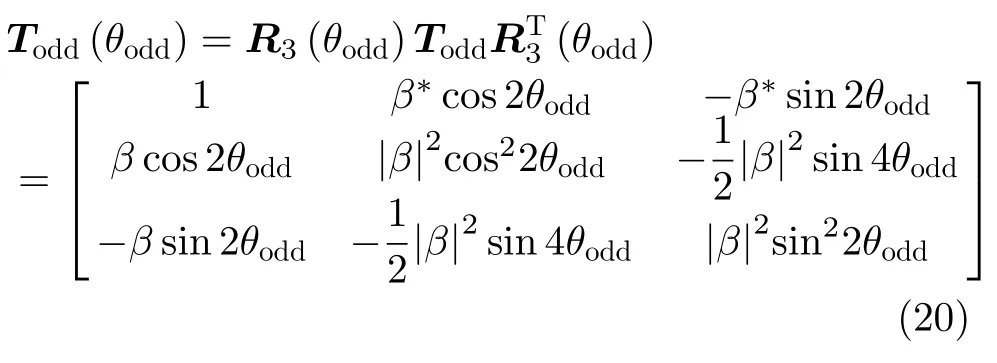
其中,Todd为传统奇次散射模型。
可以看到,相比于传统模型式(13)和式(14),精细化的二次散射模型式(19)和奇次散射模型式(20)对交叉极化项T33和副对角线项 T13和T23都进行了有效表征,利用了完整的极化信息。因此,相比于不断增加散射分量以期利用完整极化信息的思路[37,38],建立精细化散射模型的方法更具有吸引力。
此外,为有效表征二次散射和奇次散射产生的交叉极化能量,文献[47-49]也先后提出了多种改进的二次散射和奇次散射模型。这些模型主要通过引入经验性的参数来表征二次散射和奇次散射产生的交叉极化能量。由于缺乏清晰的物理含义,这些经验性模型的适用范围比较有限。
(6)模型全参数优化求解
在模型参数求解方面,大部分基于模型的极化目标分解方法均采用Freeman-Durden三分量分解的分步求解思路,即首先求取体散射分量,然后根据判决门限,求取二次散射分量或奇次散射分量。对于Yamaguchi四分量分解,则首先求取螺旋散射分量,然后再求取体散射分量,最后求取二次散射分量或奇次散射分量。分步求解方法的优点是效率高,其得以实现的隐含前提是极化相干矩阵T的某些元素仅有一种散射模型有非零取值。比如,在Freeman-Durden三分量分解中,只有体散射模型有交叉极化项T33;在Yamaguchi四分量分解中,只有螺旋散射模型有T23虚部项。此外,分步求解方法仍存在以下值得商榷的问题:(a)求解过程中隐含螺旋散射模型和体散射模型具有更高的优先级,即几乎所有目标均会产生螺旋散射机理或体散射机理;(b)求解过程中包含多个人为设定的硬判决,容易导致分解结果不稳定;(c)求解过程中存在负能量,并通过强制置零进行处理。尽管采用非负特征值约束值可以避免负能量现象,但没有解决解空间中最优值的确定问题。
针对上述问题,文献[17,50]分别提出了以剩余矩阵Tresidual最小化为目标的模型全参数优化求解方法,即利用最优化原理实现模型所有参数的同时最优求解,从而克服分步求解方法存在的问题。以提出的广义极化目标分解[17]为例,对测量得到的极化相干矩阵T,结合精细化二次和奇次散射模型,其分解框架为

广义极化目标分解框架中可以包含任意的散射模型。剩余矩阵Tresidual用于衡量这些模型与观测值的匹配程度。剩余矩阵越小,则模型能更好地匹配测量值。因此,剩余矩阵的最小化可以作为模型全参数求解的优化准则,即

其中,∥Tresidual∥2是Tresidual的2-范数。
由于极化相干矩阵为Hermitian矩阵,因此只需要利用上三角元素进行求解。同时,在上述广义极化目标分解框架下,精细化的二次和奇次散射模型已经对目标方位取向等属性进行了建模。因此,不需要对观测数据做方位向补偿处理,体现了该框架的普适性。模型全参数优化求解的不足之处在于计算效率不高。针对这一问题,近期也提出了一种快速的广义极化目标分解方法[51],并在不断进行完善。
(7)其它改进方法
除上述研究进展外,其它一些具有代表性的改进方法还包括:引入矩阵酉变换的分解方法[52-54]、引入特征值分解的混合分解方法[55,56]、修正散射对称性假设的分解方法[57,58]、引入干涉信息的分解方法[59]、极化各向异性分解[60]等,在此不再一一赘述。
利用机载Pi-SAR系统在日本仙台城区获取的X波段极化SAR数据对比了Yamaguchi四分量分解[37]、结合方位向补偿处理的Yamaguchi四分量分解[22]和广义极化目标分解[17]等方法。对比实验结果如图1所示。可以看到Yamaguchi方法能够正确将取向平行于极化SAR飞行方向的建筑物解译为人造目标散射机理(主二次散射或主奇次散射机理),在合成的RGB图(红色代表二次散射,绿色代表体散射,蓝色代表奇次散射)中呈现为红色或紫色。然而,对于取向不平行于极化SAR飞行方向的其它建筑物,则呈现为明显的主体散射机理(绿色)。主体散射机理主要表征森林等植被目标,因此传统方法存在严重的解译失真。广义极化目标分解方法则取得了显著提升的性能,能够正确解译具有不同取向的建筑物目标,为后续目标检测识别奠定基础[17]。
2.3 极化旋转域解译的研究进展[8-10,12]

图1 建筑物目标极化分解结果Fig.1 Polarimetric decomposition results from a built-up area
雷达目标的后向散射敏感于目标姿态与雷达视线的相对几何关系,即目标存在散射多样性。对同一目标,当其相对于雷达视线的姿态不同时,其极化散射特性可能显著不同;对不同目标,在特定姿态下,也可能表现出极为相似的极化散射特性。雷达目标的散射多样性给成像雷达目标信息处理与应用造成诸多不便,是当前雷达目标散射机理精细解译和定量应用面临的主要技术瓶颈之一[8,18]。另一方面,雷达目标的散射多样性中也蕴含了目标的丰富信息。对雷达目标的散射多样性进行有效挖掘和利用,能够给目标散射机理解译与应用带来新的研究思路。因此,在绕雷达视线方向提出了极化旋转域的概念,将特定几何关系下获得的目标极化散射信息拓展到绕雷达视线的旋转域。在此基础上,提出了统一的极化矩阵旋转理论[10]和极化相干/相关特征旋转域可视化解译工具[9],并进一步导出了一系列具有明确物理意义的极化特征量,并应用于人造目标增强与检测[61]、地物辨识与分类[62,63]、灾害评估[64]等。
2.3.1 统一的极化矩阵旋转理论
相较于试图消除目标散射多样性影响的研究思路,文献[10,12]将特定几何观测条件下获取的目标极化矩阵拓展到绕雷达视线的旋转域,并建立了极化矩阵在旋转域的解析表达式,进而导出了一系列极化振荡参数集和极化角参数集。在此基础上,建立了在极化旋转域解译目标散射机理的方法,为雷达目标散射机理解译提供了新思路。
以极化相干矩阵为例,通过数学变换可以发现,极化旋转域中极化相干矩阵T(θ)各元素均可统一地由一个正弦函数进行表征

其中,A是振荡幅度,B是振荡中心,ω是角频率,θ0是初始角参数。
这样,T(θ)的每个元素均可由导出的参数集{A,B,ω,θ0}进行完整表征,由此可建立极化相干矩阵在极化旋转域的统一表达式。极化相干矩阵在极化旋转域的主要机理效应表现为各元素的振荡起伏。因此,导出的参数集{A,B,ω,θ0}称为振荡参数。
本质上讲,这些振荡参数直接与目标旋转域极化散射特性相联系,具备表征地物散射特性的潜能。旋转域极化相干矩阵的元素项可以分为5组:(1)Re[T12(θ)]和 Re[T13(θ)];(2)Im[T12(θ)]和 Im[T13(θ)];(3)Re[T23(θ)],T22(θ)和T33(θ);(4)|T12(θ)|2和|T13(θ)|2;(5)|T23(θ)|2。同组内的元素,得到的振荡参数集{A,B,ω,θ0}包含等价的信息或者振荡参数是相同的。此外,由极化旋转域还可导出几组具有优良特性的旋转域角参数,包括:1)不动角参数θsta,使对应的矩阵元素在旋转前后保持不变的非零旋转角,即f(θsta)=f(0);2)最小化和最大化角参数和θmax,使对应的矩阵元素在旋转域实现最小化和最大化,即f(θmin)=−A+B和f(θmax)=A+B;3)零角参数θnul,使矩阵对应元素为零的旋转角,即f(θnul)=0。特别地,零角参数θnul_Re[T12]和θnul_Im[T12]能够表征目标散射对称性条件、共极化通道能量的相对大小和共极化分量的相位差等关键信息,其取值具有明确的物理意义。
利用机载UAVSAR在加拿大马尼托巴地区所获取的L波段极化SAR数据,验证导出的旋转域零角参数在地物辨识方面的性能。该研究区域包含多种不同类别的农作物。极化SAR数据由SimiTest方法[65]进行相干斑滤波预处理。对常用的旋转不变特征——极化熵H、平均角参数、极化反熵Ani和总功率SPAN,以及从极化旋转域导出的零角参数θnul_Re[T12]和θnul_Im[T12]开展性能对比分析,如图2所示。可以看到,相比于4个常用旋转不变特征,这两个零角参数能够更灵敏地表征不同目标的散射差异(如椭圆框所示区域),并在目标分类等领域获得了实际的应用验证[10,13-15,63,66]。
2.3.2 极化相干/相关方向图解译工具

图2 基于UAVSAR数据的极化特征对比Fig.2 Comparisons of polarimetric features using UAVSAR
极化SAR不同极化通道间的极化相干特征是一种常用的极化特征量,在目标检测、分类等领域得到应用。目前,对极化相干特征的有效利用仍存在两方面的局限。首先,极化相干特征十分敏感于目标的姿态。以建筑物为例,极化相干特征的取值严重依赖于建筑物取向与极化SAR飞行方向的相对关系。当二者平行时,极化相干特征取值趋近于1;当二者有较大夹角时,极化相干特征取值恶化,远低于1。其次,对具有散射对称性的自然地物,极化相干特征的取值较小,趋近于0,难以实际应用。为解决上述问题,文献[9]发展了一种极化相干特征旋转域解译与表征方法。该方法的核心思想是将特定姿态下的极化相干特征拓展到绕雷达视线的极化旋转域,通过可视化处理和参数化表征,完整地描述目标极化相干特征在旋转域中的特性。
对任意极化通道sX和sY,传统的极化相干特征为

将极化相干特征拓展到极化旋转域,可得

极化相干特征的值域为(0,1)。在极化相干特征基础上,若不考虑极化通道的归一化,则可得到旋转域极化相关特征,为

极化相关特征相比于极化相干特征有更大的动态范围,其值域为(0,+∞)。将极化相干特征和极化相关特征按旋转角θ在极坐标系中表征,可分别得到旋转域极化相干方向图和极化相关方向图,实现可视化表征,如图3所示。
以旋转域极化相关方向图可视化解译工具为例,可以定义以下特征量进行表征:









其中,|,α为调节因子,通常取α=0.95且θ′′ >>θ′。max{·}为求最大值;min{·}为求最小值;mean{·}为求均值;std{·}为求标准差。
下面将结合极化SAR实测数据,介绍上述极化解译识别方法和导出的极化特征量的一些典型应用。
3 结合极化解译识别进展的典型应用研究
本节介绍利用近期提出的几种极化解译识别技术开展的极化SAR应用研究,主要包括舰船检测、地物分类和损毁评估3个方面。
3.1 舰船极化检测研究[67]
极化旋转域导出的特征中包含着丰富的目标极化信息,通过极化特征优选处理并构造目标检测方法,可用于极化SAR舰船目标检测。其中,极化相关方向图特征相较于极化相干方向图特征有更大的动态范围,具有更好区分舰船目标和海杂波背景的潜能,因此选取极化相关方向图特征用于舰船检测。首先,结合目标杂波比(Target-to-Clutter Ratio,TCR)对极化相关方向图特征进行分析和优选。极化SAR数据可由Lexicographic矢量kL=[SHH和Pauli 矢量kP=SHH−SVV2SHV]T表征,选取矢量中两两元素组合可构造6个极化相关方向图。其中,对相互独立的极化相关方向图和进行分析。
利用实测极化SAR数据,分别选取10个包含舰船目标的区域和10个杂波区域,得到的极化相关方向图特征的TCR均值如图4所示。从左到右四栏分别代表极化相关方向图和导出的特征。由于导出的角度特征与其他特征的量纲不同,以后将单独考察。
从图4可得,极化相关方向图特征的TCR基本都远大于1。其中TCR最高的3 个特征为和基于上述3个极化相关方向图特征,结合门限处理和形态学滤波等处理,可构建极化SAR舰船目标检测方法。
选用经典的SO-CFAR方法[68]和新近提出的结合超像素的显著性检测方法[69](记为Saliency方法)作为对比方法,并利用高分三号极化SAR数据开展舰船目标检测研究。该数据的标称分辨率为8 m,成像时间是2017年3月15日,成像区域为中国香港海域。数据大小为3450×2150像素,共包含242只舰船。高分三号数据的Pauli RGB图和舰船目标真值图如图5所示。利用品质因数(Figure of Merit,FoM)来定量分析不同方法的性能,其表达式为

其中,NC,NFA和NM分别代表正确检测数、虚警数和漏检数。
利用高分三号极化SAR数据的舰船目标定量检测结果如表1所示。相较于对比方法,基于和这3个特征的检测方法品质因数更高,检测性能更佳。其中,TCR最高的品质因数最高,达到97.13%。对比分析验证了极化旋转域解译方法的有效性。
3.2 地物极化分类研究[66]
地物分类是极化SAR图像处理的重要应用之一,在农作物生长监视、城区测绘以及环境监测等领域具有基础性作用。在农作物生长监视和产量估计等应用中,通常会利用同一观测区域的多时相极化SAR数据。然而,由于在多时相数据获取期间农作物的生长变化,发展具有较强稳健性及较好泛化性的分类方法仍面临挑战。
近年来,以卷积神经网络(Conventional Neural Network,CNN)为代表的深度学习算法在自然图像处理,特别是分类识别应用上取得了突破性进展。其中,CNN模型的多层结构能够提取输入数据的深层抽象特征,而这类特征对于不同类别具有较强区分能力。基于CNN模型的基本模块,文献[66]提出一种用于多时相极化SAR地物分类的CNN模型,如图6所示。在此基础上,建立了一种极化特征驱动的CNN分类器,其核心思想即是将极化SAR散射机理解译知识与CNN模型结合,以优选极化特征驱动CNN分类器。所用优选极化特征包括四个经典旋转不变特征(极化熵H、平均角参数、极化反熵Ani和总功率SPAN)和两个旋转域零角特征()。该分类方法简称为Selected Features+CNN (SF+CNN)。同时,与上述方法进行对比的是直接以极化相干矩阵之中九个元素项作为输入的CNN分类方法,简称为T3+CNN。

图5 高分三号数据Fig.5 GaoFen-3 data
美国NASA/JPL实验室的机载UAVSAR系统在加拿大马尼托巴地区获取了一批L波段多时相极化SAR数据。利用其中的3个多时相极化SAR数据开展多时相地物分类实验,3组数据分别获取于2012年6月17日(Day of the Year,DoY 169)、6月22日(DoY 174)和6月23日(DoY 175)。在预处理阶段,上述3个时相的极化SAR数据均以DoY 169数据为基准进行配准处理,且均使用SimiTest方法[65]进行相干斑滤波处理。滤波后3个时相极化SAR数据的Pauli RGB图如图7(a)—图7(c)所示。相应研究区域内包含有多种不同类别地物。真值图如图7(d)所示,包括:阔叶林、草料、大豆、玉米、小麦、油菜籽以及燕麦等。从图7可以观察到因农作物生长而引起的不同时相数据之间的变化。
在对比实验中,为了验证CNN分类器的泛化性能,仅从DoY 169和DoY 175两个时相的数据中提取训练样本用于训练CNN分类器。这样,相对而言,DoY 174时相的数据对于训练好的CNN分类器是全新的。对比实验中训练率分别设置为1%,5%以及10%。此外,除输入特征不同外,两种对比方法的其它参数保持一致。在不同训练率下得到的分类结果如表2所示。对于训练所用的DoY 169和DoY 175两个时相,SF+CNN与T3+CNN两种方法得到的分类性能相当,总体分类精度(Overall Accuracy,OA)高,且稳定在98.34%至99.54%之间。两种分类方法的性能差异主要体现在没有训练数据的DoY 174这一时相。对DoY 174时相,SF+CNN方法明显优于T3+CNN,在3种训练率下均能够得到更高的OA,分别为98.69%,98.11%和97.04%。相较于T3+CNN方法,SF+CNN方法得到的OA平均提升了4.86%,且接近于有样本用于训练的两个时相的分类精度。因此,散射机理解译知识与深度学习技术的结合确实能够提升多时相极化SAR地物分类的精度及泛化性能。

表1 高分三号极化SAR舰船目标检测结果Tab.1 Ship detection results with GaoFen-3 data

图6 提出的分类器Fig.6 The proposed classifier architecture
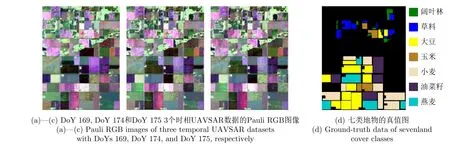
图7 相干斑滤波处理后的多时相UAVSAR数据及真值图Fig.7 Multi-temporal UAVSAR datasets with speckle reduction and the ground-truth data
3.3 建筑物损毁评估研究[8,11,64,70]
对建筑物等高价值目标的损毁精细评估,在打击效果评估、减灾防灾等领域有着重要需求。近年来,具有较大破坏力的地震等自然灾害频发,快速准确确定灾害的空间分布和损毁程度,是制定救援计划、减轻损失的关键。建筑物损毁直接关系人员伤亡和经济损失,成为灾后救援和重建的主要研究对象。建筑物在损毁前后对电磁波的响应和极化调制机理是明显不同的。极化特征量能够表征目标固有的结构属性和散射特性,基本不受时间/空间基线等影响,具有更稳健的性能。在此基础上,文献[8,11,64,70]提出了多种基于散射机理分析的广域建筑物倒损率快速准确定量估计方法,通过构建敏感于建筑物倒损率的极化倒损因子,实现对广域建筑物倒损率的精细定量反演。
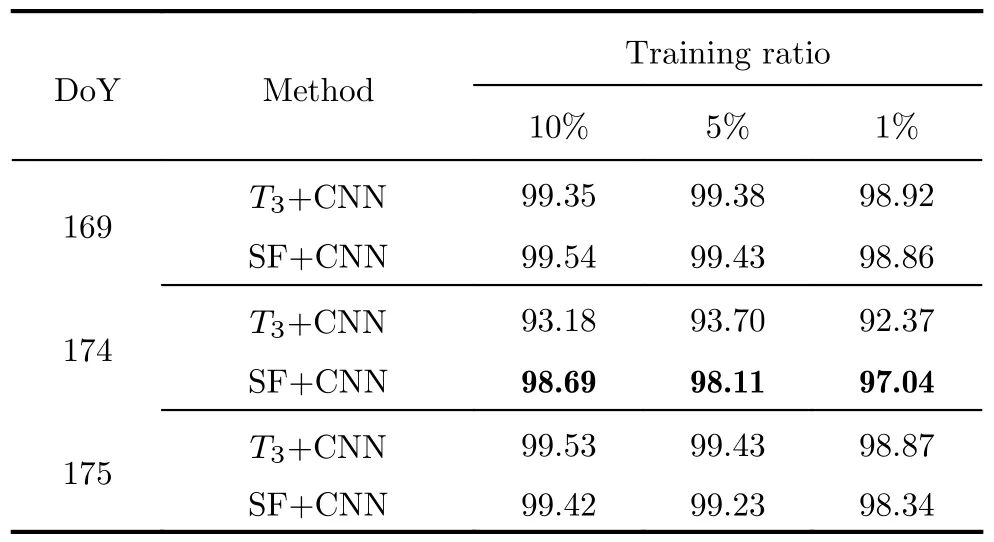
表2 UAVSAR极化SAR地物分类的总体分类精度(%)Tab.2 The OAs of polarimetric SAR land cover classification results with UAVSAR data (%)
本节介绍一种利用极化目标分解的建筑物倒损率估计方法[64]。建筑物的倒损会导致“地面-墙体”二面角结构的减少。建筑物倒损前后散射机理的主要变化是由主二次散射机理变为主奇次散射机理,如图8所示。精细化目标分解方法能够准确提取建筑物区域的各散射分量。减少的主二次散射分量直接与损毁的“地面-墙体”二面角结构的数量密切相关。这样,面向多时相极化SAR数据,倒损前后主二次散射分量贡献的比值即可作为建筑物倒损的极化评估因子,为

其中,(DominantPd)pre和(DominantPd)post分别为损毁前后主二次散射分量。
根据目标极化散射解译理论,RatioPd取值越低,则“地面-墙体”结构减少越多,建筑物倒损率越高。因此,建立的建筑物倒损率反演表达式为

其中,DL为建筑物倒损率,k和b为反演参数,且k <0。当RatioPd=0时,“地面-墙体”全部损毁,对应的倒损率为DL=1;当RatioPd=1时,“地面-墙体”结构没有损毁,对应的倒损率为DL=0。因此,可得到k=−1和b=1。
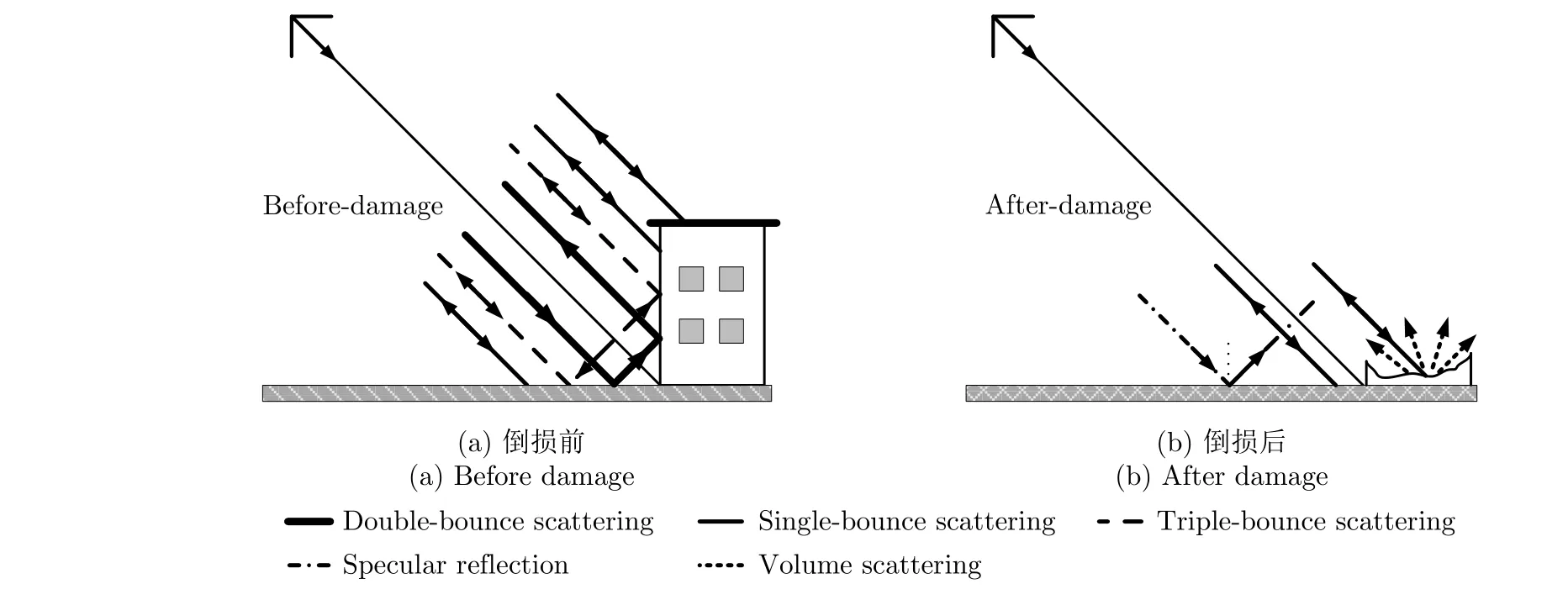
图8 建筑物倒损前后极化散射机理变化示意图Fig.8 Illustration of the changes of the polarimetric scattering mechanisms
利用建筑物极化倒损评估因子式(38)和反演表达式(39),建立了广域建筑物损毁精细定量评估方法。结合星载ALOS/PALSAR多时相极化SAR数据,对2011年3月11日东日本大地震中受损严重的宫城县开展了广域建筑物倒损率精细定量估计研究,结果如图9所示。与真值数据对比可以看到,上述方法能够准确检测损毁建筑物区域,并且能够准确估计建筑物区域的倒损率,为灾害评估和灾后救援提供重要的决策信息。
4 总结与展望
具备极化测量能力的成像雷达在侦察监视、精确打击、对地观测、环境遥感等领域得到越来越广泛的应用。雷达目标极化散射精细建模与解译是该领域的基础性科学问题,是连接极化成像雷达数据和实际应用的桥梁。面向极化成像雷达目标解译识别的研究前沿和挑战,我们预期以下方面在未来一个时期值得重点关注。
(1)极化散射建模与解译的定量评估
以基于散射模型的极化目标分解为例,国内外已经提出了大量的模型和方法。2014年,文献[18]提出从假设条件的合理性(包括:散射对称性假设、模型优先级假设、模型求解假设等)、是否出现负能量、是否完整利用极化信息和计算效率等维度,并结合一些具有明确散射特性的典型目标,定性和综合评估各种极化目标分解方法的性能。近年来,也有学者从其它角度开展了极化目标分解方法的评估研究[71,72]。然而,如何建立具有普适性的定量评估方法仍然是当前面临的难题,值得继续深入研究。
(2)超高分辨率成像雷达极化信息处理
当前,国内外已有多部机载极化SAR系统具备了亚米分辨率成像模式。其中,德国的MEMPHIS系统具备圆极化测量能力,并可到达6 cm的超高成像分辨率。我国也有多部机载极化SAR系统具备了亚米级的成像分辨率。与此同时,在机载系统里获得成功实践的亚米超高分辨模式也在快速向星载系统部署实施。具备超高分辨率成像模式是极化SAR系统发展的重要方向。成像分辨率的极大提升,在获取目标更丰富细节信息的同时,也给极化SAR目标理解与解译带来了新的科学问题和技术挑战。针对超高分辨率极化SAR,发展面向目标对象的散射建模、深度解译与准确表征的理论与工具具有重要的研究意义和应用价值。
(3)多模式成像雷达极化信息处理
随着雷达成像技术和雷达极化技术的发展进步,多视角SAR、双站SAR、层析SAR、圆迹SAR、全息SAR、视频SAR、MIMO-SAR等多模式成像雷达都已经或逐步具备全极化测量能力[3,73-76]。总体而言,针对这些多模式新体制成像雷达的极化信息处理研究仍处于起步阶段,具有非常广阔的发展空间。此外,针对提升测绘幅宽而发展起来的混合极化SAR或简缩极化SAR[77],发展相应的极化信息处理方法也是值得研究的重要方向。
(4)雷达目标散射解译与人工智能
以深度学习为代表的人工智能算法在诸多领域获得了极为成功的应用,并已拓展应用于成像雷达目标检测、分类与识别等方面。与此同时,人工智能算法的脆弱性和可欺骗性也在不断暴露。更进一步地,雷达目标图像与照片、光学等图像有着显著差异,如何提升人工智能算法在成像雷达领域的健壮性、泛化性是值得深入研究的重要课题。其中,开展融合雷达目标散射解译的人工智能方法研究,有望成为一条可行的途径。
