非均匀圆阵列无模糊长基线干涉仪测向方法*
2020-05-18王永军池浩
王永军,池浩
(1.北京电子工程总体研究所,北京 100854;2.北京计算机技术及应用研究所,北京 100854)
0 引言
随着信息化的高速发展,攻防双方的武器系统更加智能多样化。面对复杂多变的战场环境和对抗策略,传统单一模式的雷达导引头已难以满足制胜的军事需求,采用双/多模复合导引头获取多源信息、丰富对抗措施是一种有效的技术途径,易实现察打一体化的目的,提升导弹武器系统的生命力,赢取战场最终的胜利权。多模复合制导指由多种模式的导引头参与制导,共同完成导弹的寻的任务。多模复合制导是在同一制导段、同时采用2种及以上末制导方式进行工作的一种制导方式[1]。当前多模复合制导技术是无人飞行器上雷达探测系统设计研究的主要方向。
美国的AGM-45“百舌鸟”、AGM-78“标准”、AGM-88“哈姆”反辐射导弹(anti-radiation missile,ARM)在被动导引头探测方面表现优异,AGM88E反辐射导弹弹径仅200 mm,采用了宽带被动微波+INS/GPS+主动毫米波复合制导探测体制[2-3]。被动雷达导引头实际上就是一部侦察机[4],侦察感知战场电磁环境,获取海量信息,并以敌方雷达辐射电磁波为制导信息,引导导弹跟踪目标。在多次局部战争中,反辐射导弹发挥了巨大的作用,有效地毁伤了对方地面雷达系统。
由于无人飞行器舱体可利用空间有限,且又要解决多体制导引头之间的相互耦合、串扰等一系列问题,给多模复合的设计带来巨大的挑战。在系统方案确立前,选择合理可行的复合样式尤其重要。相位干涉仪测向体制形式简单易于复合,在多个国家反辐射导弹雷达导引头中得到广泛应用。
干涉仪测向是一种无源相位测向技术,其基本原理是通过测量入射信号在各阵元上的相位差来确定目标方位。其测向具有精度高、实现简单等优点,是目前广泛应用的测向方法之一,在无线电频谱管理、航空航天及无线电侦察与对抗等民用和军用领域中均得到了广泛的应用[5]。虽然相位干涉仪测向精度高,但当干涉仪基线长度大于信号波长的一半时,将会出现相位模糊问题,解模糊便成为干涉仪测向方法的关键技术问题之一[5-8]。数字干涉仪测向逐步成熟,线阵已实际应用,但圆阵干涉仪测向算法实用较少[9-16],共形复合圆阵列干涉仪测向更是寥寥无几,本文给出了一种基于非均匀圆阵列无模糊长基线干涉仪测向的实现形式。
1 干涉仪测向
如图1所示是由2个天线组成的单基线干涉仪,平面电磁波从与天线口面夹角为θ的方向入射到天线1,2,电磁波到达2个天线的波程差为dcosθ,则由波程差引起的相位差为
(1)
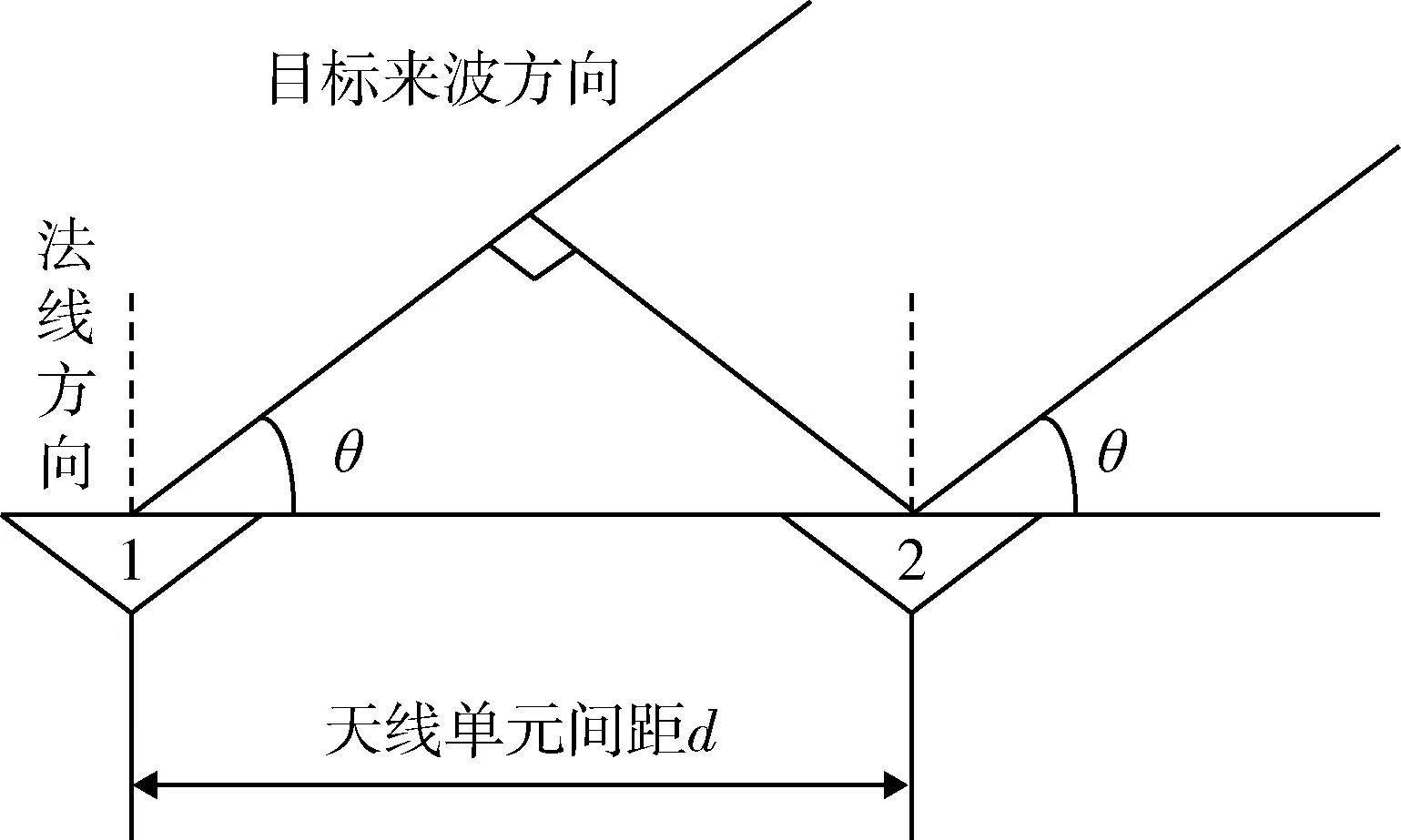
图1 单基线干涉仪Fig.1 Single baseline interferometer

如图2所示是圆阵列干涉仪天线系统,在雷达导引头测量坐标系中,天线1,2,3,4分布在半径为r的圆周上,其坐标分别为(0,r,0),(0,0,-r),(0,-r,0),(0,0,r);为了获得最大的角精度,则必将利用d13,d24作为基线进行相位差测角。根据上述干涉仪测角原理,可知两对干涉仪的输出将会出现测角模糊现象。

图2 圆阵列干涉仪天线系统Fig.2 Circular array interferometer antenna system
2 改进型圆阵列无模糊长基线干涉仪测向的天线系统设计
为了解决圆阵列干涉仪测角模糊问题,设计了如图3所示的天线位置分布,相对图2系统,1号、4号天线位置不变,2号和3号天线向外增进d长度,且增加了5号天线;即此干涉仪天线系统由5个单元组成,则基线可取d31,d42,d51,d54。
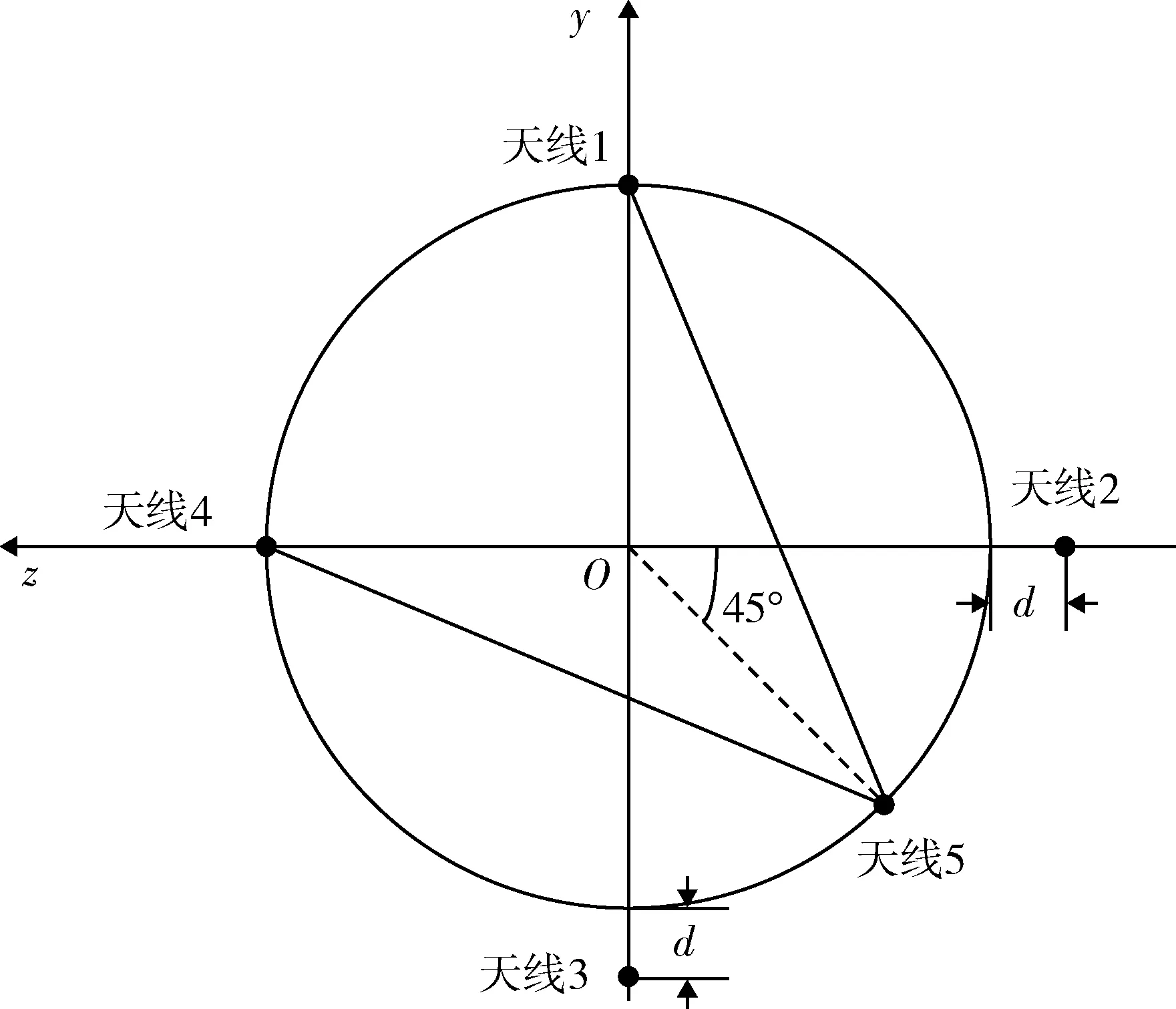
图3 单元天线分布示意Fig.3 Element antennas distribution diagram
其中5个单元天线在导引头测量坐标系中的坐标如下:
1号天线:(0,r,0);
2号天线:(0,0,-(r+d));
3号天线:(0,-(r+d),0);
4号天线:(0,0,r);
则所取基线相对应的向量分别为
(2)
依据干涉仪测角原理,可得4个测向通道的相位差:
(3)
(4)
(5)
(6)
式中目标坐标向量lOT=R(cosεcosβ,sinε,cosε·sinβ),经计算可得
(7)
(8)
(9)
(10)
解方程式可得
(11)
(12)
3 精度计算分析
一般在多基线相位干涉仪测角系统中,测角精度由最长基线所决定[3],如果忽略频率不定引起的误差,本系统的测角误差分析如下:
假若鉴相器的测角误差均为Δφ,则由式(7)所决定的误差为
(13)
由式(11)所决定的误差为
(14)
由(11),(12)右边式不模糊性,可对4个鉴相器测量的相位差进行值域限定:
(15)
(16)
使得鉴相器值满足不模糊组合值:
进而通过式(11),(12),可以解得不模糊的低精度的εljd,βljd。

(17)
4 仿真分析
结合整机系统误差和随机误差可进行仿真分析,仿真参数如表1所示,仿真结果如图4-6所示。
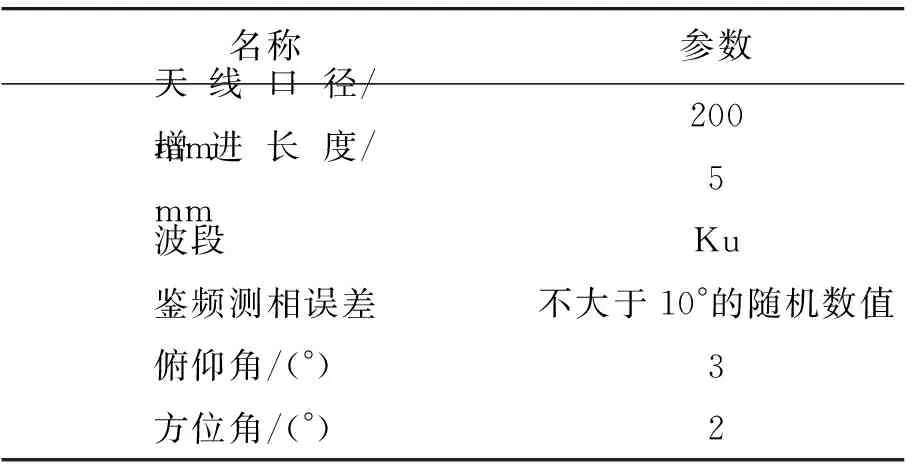
表1 仿真参数Table 1 Simulation parameters

图4 基于定点的测角误差Fig.4 Angle error based on fixed point
其中主要的系统误差:本振信号产生时的延时误差E1,接收通道延时误差E2,干涉仪通道幅度一致性误差E3,基线长度标定误差引起的测角误差E4。系统误差可以通过后期标定进行校准、消掉。
主要的起伏误差:热噪声引起误差σ1为
(18)
式中:SNR为信噪比;N为A/D采样点数。
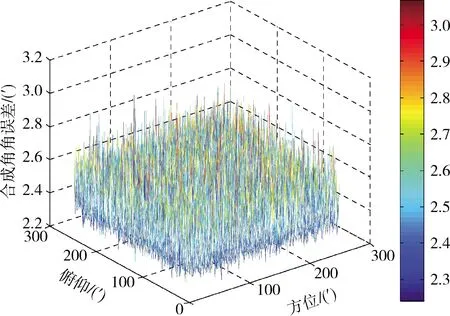
图5 合成角误差Fig.5 Synthetic angle error
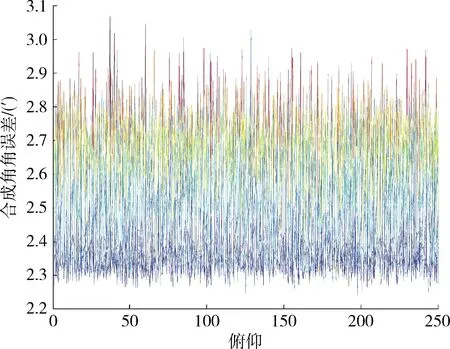
图6 合成角误差Fig.6 Synthetic angle error
5 结束语
本文提出了一种基于非均匀圆阵列无模糊长基线干涉仪测向的天线系统的设计方法,其测角精度由基线2r+d的长度决定,相比通常意义上的圆阵干涉仪测角精度高、无模糊,且算法简单,易于实现。可用于有限口径条件约束下,既要满足大探测威力、高精度测角,又要解决复合天馈交联互耦的导引头设计;同样,也可以以非均匀圆阵列天线设计为基础,在解决测角模糊和精度的前提下,结合二维空间谱估计测角算法,通过二维面阵超分辨解相干策略,实现超分辨高精度测角;获取目标辐射电磁波极化信息,剔除多目标及其他干扰源,进一步优化系统性能指标。
