基于北斗高精定位与智能视频接力的交通线路要人安保关键技术设计及其实现
2020-05-15吴韵驰
吴 钢, 吴韵驰
(1.武汉市公安局交通管理局, 湖北武汉 430030; 2.天津工业大学计算机科学与技术学院, 天津 300387)
0 引言
1 精细化交通线路要人安保工作难点及技术对策
传统的交通线路要人安保工作通常依靠大量警力投入与全封闭式交通管制,这种模式不仅造成警力与交通资源浪费,也给人民群众正常出行带来不便,且无法有效发现与预防安全风险。而精细化交通线路要人安保即是要通过技术手段最大程度遏制与消除警卫线路中的不确定性,确保警卫对象安全顺畅抵达,同时避免对公众出行产生影响。实战而言,精细化交通线路要人安保当前面临的难题:一是警卫对象精准定位难,由于城市复杂的道路及建筑物环境,在高架桥、隧道及高楼区域常出现全球定位卫星信号遮挡与移动通信基站信号延迟问题,从而导致安装在警卫车队上的定位设备无法连续定位、定位精度不足及信号传输延迟,且在要人安保任务过程中,常有部门架设“低慢小”航空器干扰装置,此类装置发送的干扰信号也会阻碍定位设备正常获取实时位置,最终结果即是警卫对象定位信息出现延时、漂移、中断甚至丢失,给安保工作带来极大风险与不确定性。为解决此问题,本文提出采用具有抵抗“低慢小”航空器干扰装置频率波段的定位设备,并采用基于CORS(连续卫星定位服务参考站)系统的北斗高精度定位技术最大程度保障定位精度,对移动通信延迟造成的定位信息延时或丢失问题,研发基于时空位置预测的车辆轨迹在线推演技术对车辆实时位置进行精准推算,解决警卫对象精准定位难问题。二是警卫对象跟踪保卫难,传统依靠人工视频巡查车队位置并手动切换大屏视频信号不仅不智能,且操作难度大、易出错,无法做到警卫对象全程可视。本文通过研发基于地理方位计算的全时空无缝视频接力技术,根据安保线路沿线视频监控设备高精度位置与警卫车队实时位置计算二者间空间距离与空间方位,以空间距离、空间方位、视频设备视域范围及在线情况作为共同约束条件,筛选出尽可能沿安保线路连续分布的一定数量监控设备作为视频接力设备,并根据车队位置实时计算调整视频接力设备及其视角方位,实现对警卫对象无缝跟踪视频接力。三是警卫线路风险防控难,安保线路沿线交通态势及社会面形势复杂,人流、车流、制高点、重点人、重点车及其他异常事件皆存在安全隐患,且安保线路距离长、时间长、范围广,对精准风险防控造成困难。本文提出以警卫车队位置为核心,研发安保资源时空关联与实时预警技术,对警卫车队实时位置周边区域进行交通态势及社会面形势实时感知预警,通过缩小预警管控区域进行针对性精准预警,优化警力部署同时提高风险管控效率。
2 精细化交通线路要人安保关键技术
2.1 基于北斗高精定位与时空位置预测的车辆轨迹推演技术
CORS技术用于实现厘米级的动态实时卫星定位服务,目前应用该技术实现北斗高精定位已较为成熟,本文运用此技术对安保线路及其沿线视频监控设备、信号灯、诱导屏、警卫力量点位、制高点等对象进行高精度位置采集,对清障车、交通报信车、收尾车、巡逻车等进行实时位置测量,以最大程度获取各类警卫对象精准地理位置。为解决安保过程中可能出现的定位信息延时或丢失问题,本文提出了车辆时空位置预测与轨迹推演技术,主要包括4部分内容:
① 将车辆位置实时纠偏至安保线路,对获取到的每一个车辆位置点P与安保线路集合L进行空间距离计算,将其垂直纠偏至距离最近的安保线路,获得纠偏后的车辆位置点T,T由空间位置与采集时间组成,如图1所示,L1与L2为两条线路,P1为原始位置点,T1为纠偏后位置点。
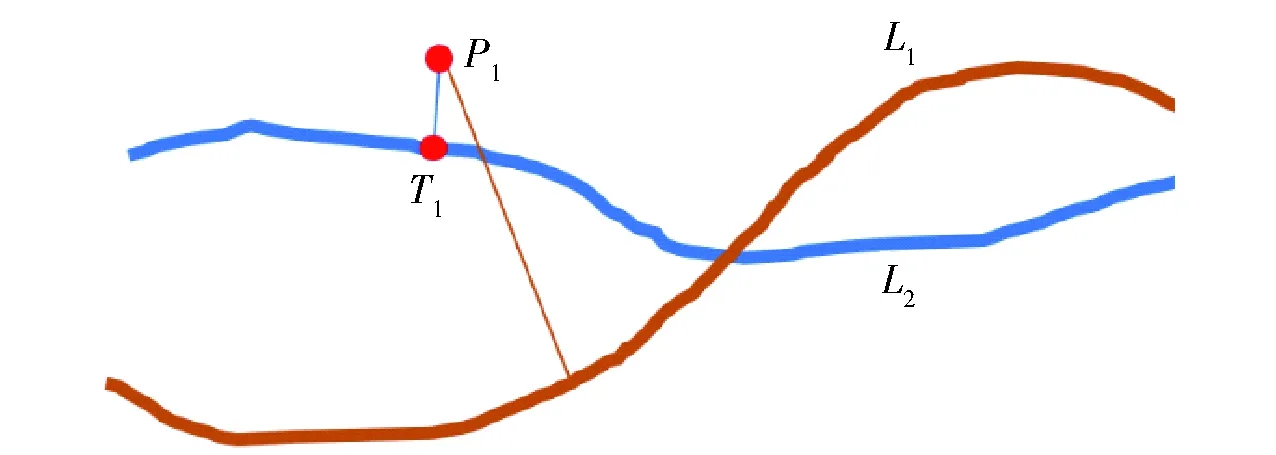
图1 位置纠偏示意图
② 获得并更新车辆最新轨迹点集合T,其由n个车辆位置点T组成,按照采集时间顺序排列,更新规则为移除T中采集时间最早的位置点,并插入最新采集位置点,保证集合T元素个数为n。
③ 记集合T中所有位置点最早采集时间为t0,最新采集时间为t1,当前时间为t2,若满足式(1)与式(2),则认为可利用集合T中位置点计算车辆运动参数,包括行驶平均速度V与行驶方向D。
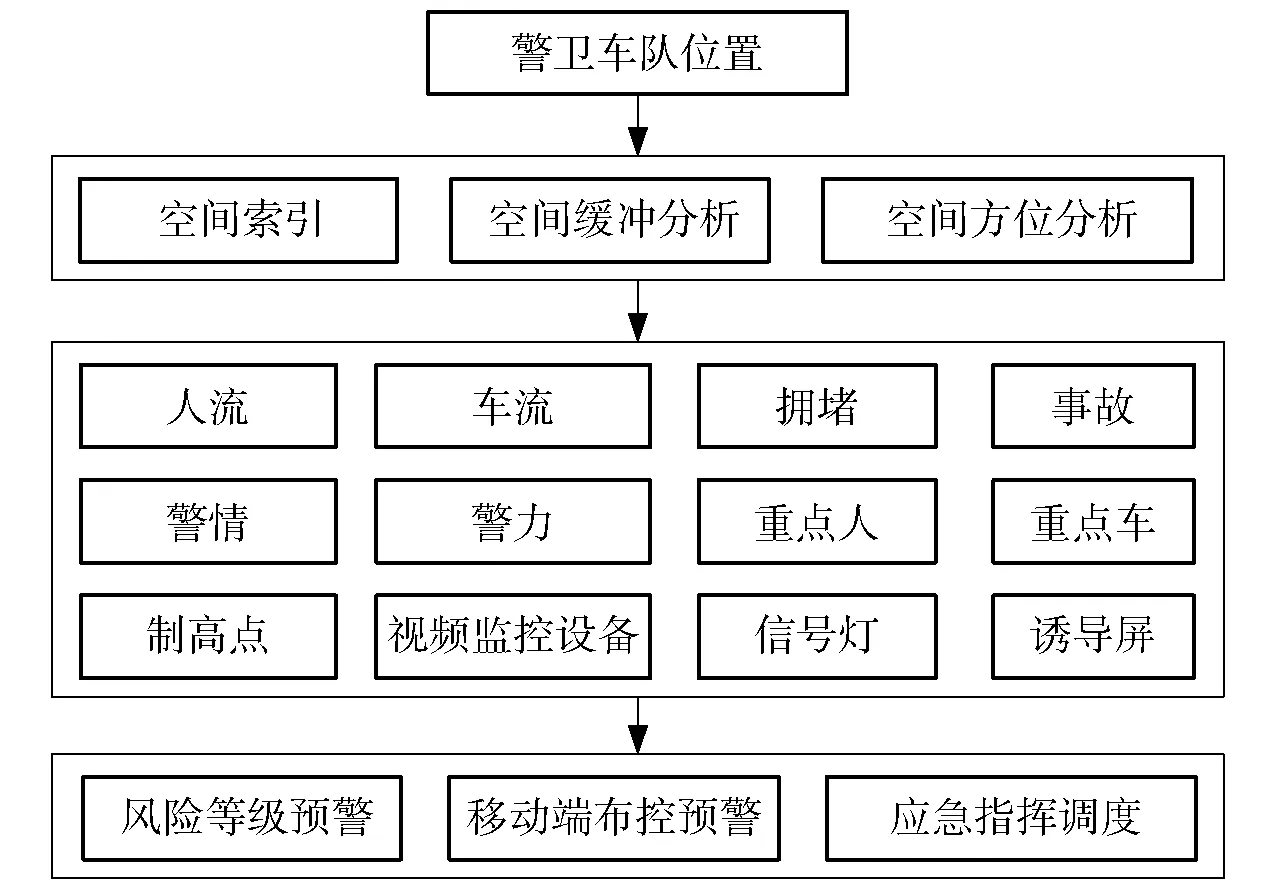
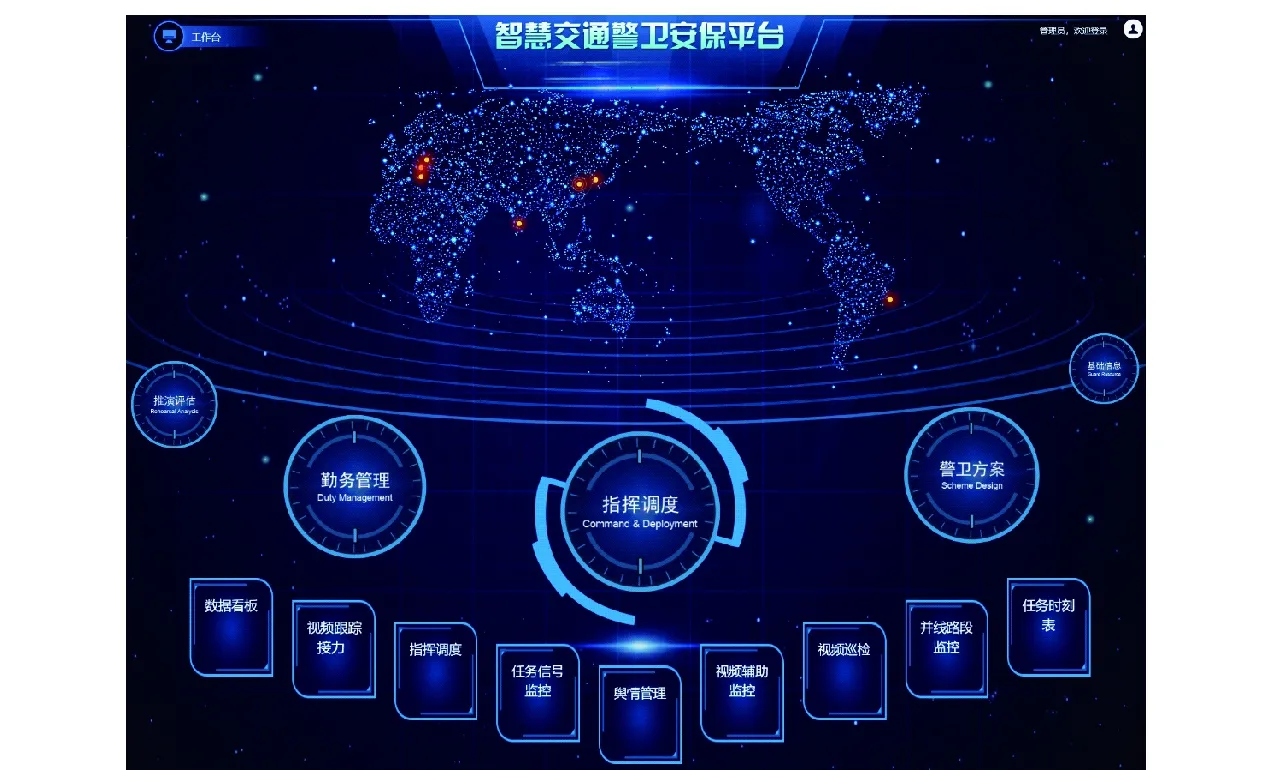
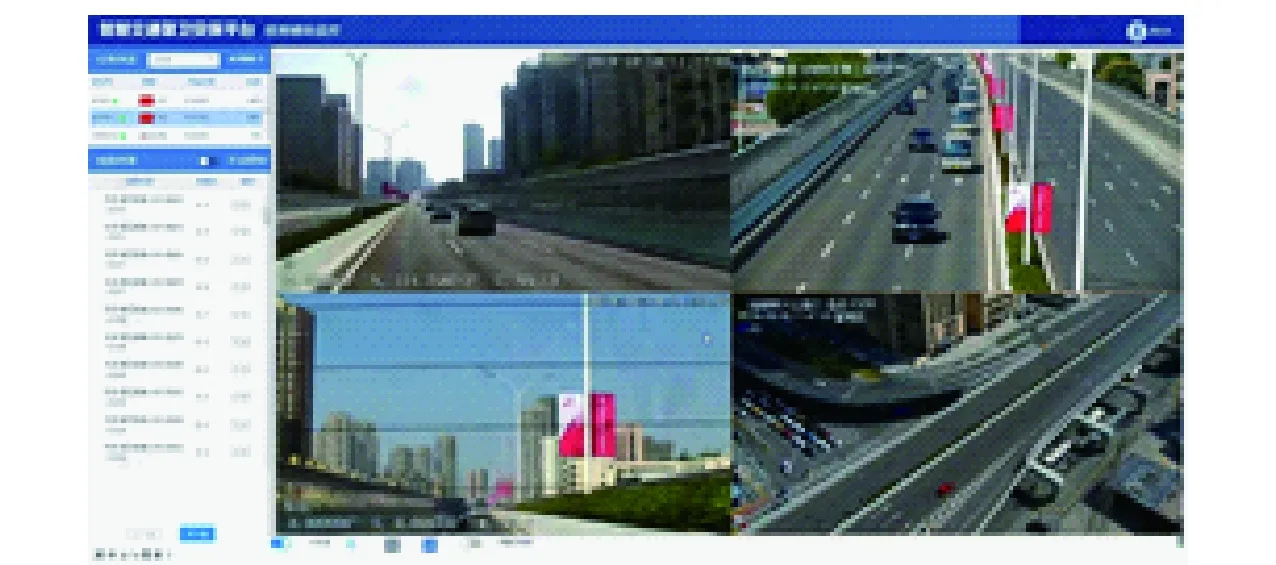
t2-t1 (1) (2) dij=Ti,Tj沿安保线路的网络距离, (3) (4) (5) 其中:式(1)保证最新位置点采集时间与当前时间之间间隔不超过一定时间阈值,式(2)保证集合T中所有位置点平均时间间隔不超过一定时间阈值。式(3)代表采集时间相邻的两个位置点沿安保线路网络距离,式(4)计算车辆行驶平均速度V,式(5)计算车辆行驶方向D。 ④ 对车辆实时位置进行预测。由于车辆定位信息延时或丢失,且定位数据从互联网同步至公安网也存在耗时,因此最新位置点采集时间t1一定延迟于当前实际时间t2,可根据车辆运动参数V与D进行位置估算。 S=(t2-t1)V; (6) 式(6)计算结果为预测车辆行驶距离,按车辆行驶方向D沿安保线路计算网络距离S,所得位置点为车辆实时预测位置。由于车辆运动参数V与D会根据车辆轨迹点集合更新而进行重新计算,故能保证始终利用最新的车辆运动参数进行位置预测,提高预测精准度。在实际计算过程中,为保证车辆沿安保线路平滑移动,避免出现车辆位置跳跃,可按照一定时间间隔如每秒计算一次车辆实时位置,形成较为连续的轨迹序列,获得较好的可视化效果,并为视频接力服务提供高质量的车辆位置数据。 那天午后,知了在树上叽叽喳喳地叫着,我对着天空,呆呆地望着它,妈妈见我这样,急忙想出一个好点子,我们去图书馆吧!我像一只被放出笼子的小鸟一样,冲到了图书馆。 要人安保任务通常在城市进行,由于安保线路距离长、时间长、范围广,需要接入及分析的数据量巨大,如直接对所有线路周边全量数据进行分析研判会造成分析效率低下及分析难度增加等问题。鉴于此,本文提出以警卫车队位置为核心的安保资源时空关联与实时预警技术,针对警卫车队位置设立不同层级空间缓冲区,实时计算缓冲区内人流、车流、警力、视频监控设备、信号灯、诱导屏、制高点、警情、拥堵、事故、重点人、重点车等对象,并根据车队位置动态更新空间缓冲区范围及计算结果,实现精准时空域的安保资源时空关联,从而有效提高安保资源获取效率。此外,对时空关联所得安保资源进行实时监控预警,建立多种预警规则,对从中发现的道路异常事件及社会面异常警情进行实时预警布控,调度最优警力进行处置,可有效提升事件预警及处置效率,技术原理见图2。 图2 安保资源时空关联与预警技术原理 以上方法已应用于武汉第七届世界军人运动会智慧交通线路警卫安保系统,效果极佳且受到公安部及省、市各级领导充分肯定。 要人安保任务要求对警卫对象全程可视,传统依靠人工视频巡查车队位置并手动视频追踪方法无法满足实战要求。本文提出基于地理方位计算的全时空无缝视频接力技术,能智能进行视频跟踪监控,整个过程无需人工干预且具有广泛通用性,主要包括5部分内容: (1)对安保线路沿线视频监控设备高精度大地坐标进行采集,包括大地经度L、大地纬度B和大地高H,根据视频监控设备沿安保线路正方向空间分布对其进行连续编号,保证相邻设备编号连续。 (2)对需进行监控的警卫车辆实时位置与安保线路沿线视频监控设备进行地理方位计算,根据警卫车辆大地坐标与视频监控设备大地坐标,实时计算警卫车辆相对于视频监控设备的空间距离与空间方位,所有空间计算均在欧几里得空间进行。 (7) (8) (9) 式中(x1,y1,z1)为视频监控设备大地坐标,(x2,y2,z2)为警卫车辆大地坐标,d为视频监控设备与警卫车辆间距离,θ为警卫车辆相对于视频监控设备垂直方向夹角,β为警卫车辆相对于视频监控设备水平方向夹角。 (3)对正常在线的视频监控设备,若警卫车辆与其距离d处于该设备可视距离范围之内,且θ,β均处于该设备可调节视域范围内,则将该设备列为视频接力候选设备,所有候选设备组成视频接力候选设备集合。 (4)对候选设备集合中所有视频设备按离警卫车辆距离由近至远进行排序,选取距离近且沿安保线路连续分布的一定数量监控设备作为视频接力设备,并根据各视频设备与车辆间空间方位调整视频设备云台视角,实现对车辆动态跟踪监控。 (5)警卫车辆行进过程中,根据车辆实时位置对视频接力设备进行更新,在前述(4)基础上,需考虑对当前视频接力设备平稳替换接力,将当前视频接力设备中距离车辆最远设备移除,并加入新的视频接力候选设备集合中距离车辆近的设备。 需要指出的是,沿安保线路安装足够多的覆盖全线路的视频监控设备也是保证视频接力效果的必要条件,另外,对于部分视频缺失的路段,可采用警卫车辆车载视频代替进行视频接力。 基于精细化交通线路要人安保关键技术,武汉七军会上交警实现了军运会智慧交通线路警卫安保系统,该系统具备“卫星精准定位、视频自动跟随、信号自动控制、风险预警管控、方案电子推演”五大特色,包括“基础信息、警卫方案、推演评估、勤务管理、指挥调度”五大业务功能。系统功能界面见图3。 图3 军运会智慧交通线路警卫安保系统功能界面 在交通线路警卫工作中,系统一是实现了事前安全风险早发现早处置(见图4),通过对警卫车辆设置1、3、5、10 kM安保缓冲区,对缓冲区内12大类43小类安保资源进行时空风险分析,对多种事件及时预警处置;二是实现了事中全过程视频跟随警卫车辆,通过应用北斗高精定位与时空位置预测技术,系统实现秒级计算车辆实时位置,结果精准可靠,并通过此位置与视频监控设备进行全时空无缝接力监控,实现车队全程可视,对路面突发状况及时掌控及时处理,保障警卫对象安全(见图5)。警卫车辆经过信号灯路口,自动切换绿灯放行,减少警力部署,离开后自动恢复原有放行情况,最大限度减少交通压力。对多线路并发情况,实现及时掌握每条线路的出发和到达时间,确保精准到达;三是实现了事后根据警卫预案自动生成报告,对警卫安保工作进行推演评估。 图4 军运会智慧交通线路警卫安保系统异常 事件实时预警布控 图5 军运会智慧交通线路警卫安保系统视频智能接力 在第七届世界军人运动会开幕、赛事和闭幕期间,武汉交警利用此系统圆满完成39条线路高级别警卫,6 000余条线路赛事警卫工作,实际效果获得部、省、市各级领导的高度认可,发挥重要实战作用(见图6)。 图6 军运会智慧交通线路警卫安保系统为军运会 维稳保畅 本文针对精细化交通线路要人安保工作难点、技术对策、关键技术进行了详细论述,并结合武汉交警军运会智慧交通线路警卫安保系统进行了实践应用。总而言之,本文是运用信息化手段进行精细化智慧化要人安保的有效尝试与创新实践,相较于传统要人安保而言,本文提出的方法更智能、更高效、更实用,可为相关安保职能部门提供参考。应用于武汉第七届世界军人运动会智慧交通线路警卫安保系统,效果极佳且受到公安部及省、市各级领导充分肯定。 当然,随着新技术的进一步发展,会有更多更好的技术适用于要人安保工作,如采用5G技术解决前端设备通信延时问题、采用视频智能分析技术识别更多异常风险事件、采用动态仿真技术实现要人安保演练与评估分析。任何信息化系统建设都是不断迭代不断优化的过程,未来武汉交警将继续关注新技术发展趋势,选取更好更优技术应用于要人安保系统建设及智慧交管建设。
Ti,Tj∈T,代表采集时间相邻的两个位置点;
2.2 以警卫车队位置为核心的安保资源时空关联与实时预警技术
2.3 基于地理方位计算的全时空无缝视频接力技术
3 智慧交通线路警卫安保系统实践与应用


4 结语
