160T液压动力平板车电气控制系统
2020-05-11王大江张宇王金祥冯扶民
王大江 张宇 王金祥 冯扶民

摘要:液壓动力运输平板车用于完成重型特种装置在指定道路条件的道路运输。运输平板车可以与特种装置完成对接,并实现举升和连接固定等功能,其电气控制系统主要为实现平板车的各种转向、升降、移动等动作。该系统采用了CAN总线模块化分布式控制技术、人机交互技术及故障诊断等技术。
关键词:液压动力运输车;控制;总线;人机交互
中图分类号:TP271 文献标识码:A 文章编号:1007-9416(2020)02-0131-02
0 概述
液压动力运输平板车用于完成重型特种装置在指定道路条件的道路运输。运输平板车可以与特种装置完成对接,并实现举升和连接固定等功能,具体过程为:运输平板车下降至规定高度,纵向进入特种装置下方,达到起升高度后,与特种装置连接固定并托起特种装置。满足特种装置的道路运输、转载流程中的临时停放,下放到指定场坪等要求。
运输平板车主要由动力系统、行驶系统、液压系统、转向机构、制动系统、悬挂机构、车架、电气系统等组成。本文主要研究电气控制系统[1]。
1 电控系统总体布置
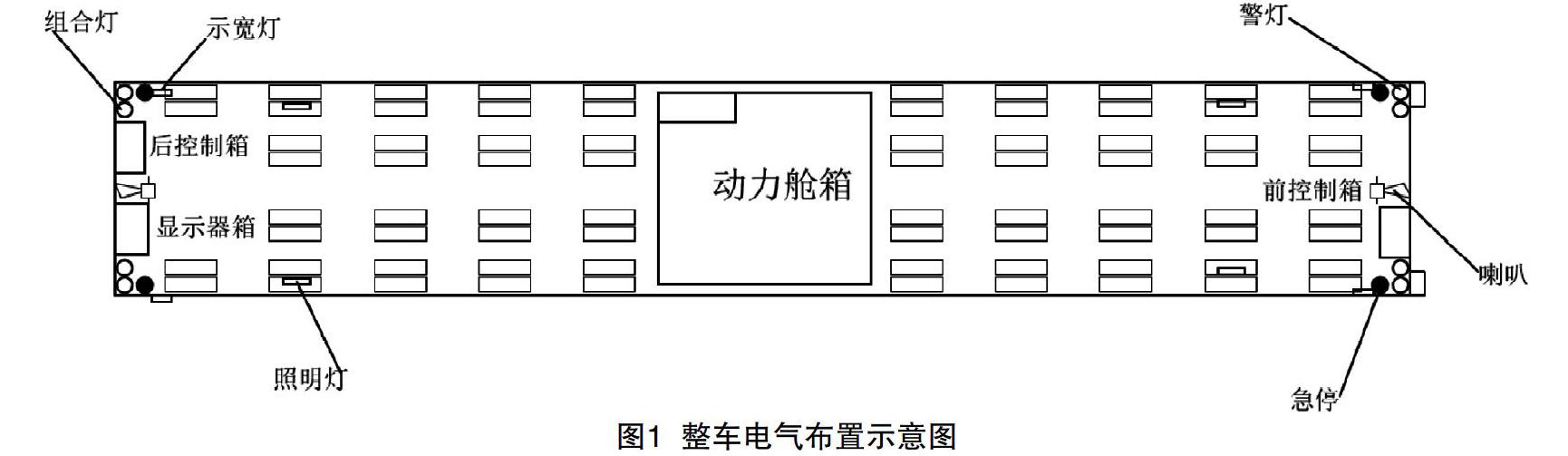
整车电气布置图图1所示。
根据车辆的机械结构特点,电气系统采用分布式控制,采用国际上最先进的控制理念,基于移动车辆的CAN总线控制技术,抗干扰能力最佳。
总线网络控制原理图,如图2所示。该图中包括所有的总线设备,主要展示各种总线设备在总线系统中的连接情况。共分为三层总线网络,第一层可以称之为主网络,用使用控制器的CAN2端口,包括动力舱箱、前电控箱、后电控箱以及显示器箱;第二层为次网络,使用CAN3端口,用于接收8个转向角度编码器和2个升降高度编码器信号的次网络;第三层使用CAN4端口连接遥控器[2]。
2 人机交互及转向控制
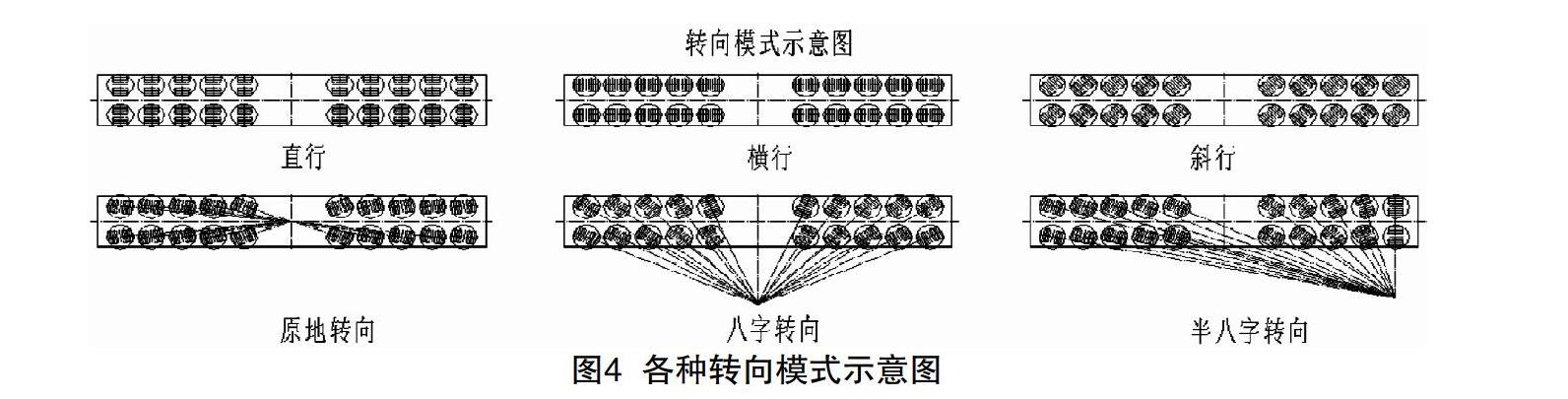
根据客户要求和现场实践经验,设计了多种基于数学模型的转向模式,如正常状态下包括直行、斜行、前半八字、后半八字、横行等,另外还实现了原地中心转向模式。电气系统对液压系统同时采用分布式控制。每一个液压悬挂及马达均由相应的控制器输入输出点进行对应。人机交互系统实时显示车辆的液压压力、堵塞报警、车速、液压油温度、流量;发动机通过J1939总线实时监测到其转速、水温、油压、小时计、扭矩等参数;车辆的总线状态、编码器的总线状态;各种报警信息等均实时提供给操作者,并进行远端传输,方便后台进行车辆的实时监控及故障维修[3]。人机交互数据如图3所示。各种转向模式如图4所示。
3 动力舱箱控制分布
该部分使用一个力士乐RC28-14控制器。主要是对发动机启停、泵和动力舱内各元件的控制、各电控箱和照明灯的供电等[4]。该控制器实时与满足总线J1939协议的柴油发动机进行通信,进而控制,实时监测其各种参数,同时控制动力舱部分的液压系统,如泵的控制,其压力的检测等。
4 前/后电控箱控制分布
该部分各使用一个力士乐RC28-14控制器,主要控制前/后半部分的转向阀、驱动马达和各指示灯等。
5 遥控器选型
采用意大利AUTEC遥控器,更好的满足设备所需的防护等级、温度范围、电磁干扰等参数,根据设备的使用要求及功能要求,设计的遥控器操作界面示意图如图5所示。
6 结语
本文详细介绍了160T液压动力平板运输车电气控制系统的组成, 主要实现的功能及控制分布,分别介绍了各个组成部分的详细控制点分布、人机交互的实现、转向模式的实现及CAN总线的布局,对各个PLC控制器的选型做了详细说明,对遥控的选型和面板的布局做了详细说明,对后续动力平板车电气控制系统的设计起到了积极的指导意义。
参考文献
[1] 王大江,张宇,王智勇.运板车驱动行走系统的优化[J].工程机械,2010(11):20-22.
[2] 王大江,张宇,王众.运板车整车升降控制算法的研究与实现[J].工程机械,2011(1):26-29.
[3] 李聪,马超,戴志兵.大型运梁车过隧道自动驾驶与控制技术设计研究[J].交通世界,2014(26):126-127.
[4] 王望予.汽车设计(第四版)[M].北京:机械工业出版社,2004.
Electric Control System of 160t Hydraulic Power Platform Transporter
WANG Da-jiang1,ZHANG Yu1,WANG Jin-xiang2,FENG Fu-min2
(1.Qinhuangdao Tianye Tolian Heavy Industry & Technology Co., Ltd., Qinhuangdao Hebei 066000;
2.Hebei Heavy Equipment Engineering Technology Center, Qinhuangdao Hebei 066000)
Abstract:The hydraulic power transporter is used to complete the road transport of heavy special equipment under the specified road conditions. The transporter completes docking with special devices, and realizes functions such as lifting, connection and fixation, its electrical control system is mainly to realize various steering, lifting, moving and other actions. The system adopts can bus modular distributed control technology, human-computer interaction technology and fault diagnosis technology.
Key words:the hydraulic power transporter; control; bus; human-computer interaction
