链路预测模型下的无人机网关选择算法
2020-05-09姚玉坤宋威威李其超张云霞
姚玉坤,宋威威,李其超,张云霞
(重庆邮电大学 通信与信息工程学院,重庆 400065)
1 引 言
近年来,无人机(unmanned aerial vehicle,UAV)已广泛地用于军事和民用领域[1].由于单个无人机的工作能力有限,尤其是对于中小型无人机来说,构成无人机自组网(UAV Ad Hoc Networks)来增加无人机工作范围,提高无人机的执行复杂任务的能力[2].根据无人机的现有应用,无人机的两种主要的通信需求是:发回传感器数据、接收控制命令[2,3].如图1所示,无人机自组网网络在空中建立后,无人机网络与地面控制站(ground control station,GCS)的通信任务全部由网关节点完成,无人机网关节点与地面控制站的通信通常由高功率无线通信支持.所有无人机采集到的数据都要经过网关才能发送到地面控制站,如何最大程度上维持无人机网关与地面控制站之间的数据链路是无人机网络和地面控制站通信中的关键问题[4].本研究的对象是中小型无人机,无人机离开地面站的控制会失联;另外,无人机的轨迹是不确定的,是根据任务动态调整的;此外,本文的研究是在网络层,不考虑通信电磁等外部条件导致的通信干扰.
无人机自组网的网关选择与无线传感器网络和Ad Hoc网络的簇头选择非常相似,例如文献[5]中的场景就是节点收集信息并最终将其传送给基站.目前,对于移动自组网分簇算法的研究都比较成熟,包括最小ID算法[6]、CONID算法[7]等;已有一些学者通过借鉴现有的分簇算法并考虑到无人机自组网中的节点高速移动问题提出了改进的无人机自组网分簇算法和网关选择算法.CONID算法是最小ID算法的改进算法[7],将连通性视为主要的考虑因素,但是在无人机自组网中无人机节点高速移动,导致节点的连通性变化较快,因此使用该算法会导致簇头频繁的切换.文献[8]提出了一种近空间无人机分簇算法.该算法通过综合考虑无人机之间的连接时间、节点度、无人机和浮空器之间连接时间这些因素进行簇头选举.该算法在计算无人机与浮空器链路持续时间时假设无人机速度大小方向不变,由于无人机执行任务时其飞行速度和方向是动态变化的,因此这样的计算方法往往只在较短的时间内才比较准确,显然不适合用于计算无人机网关节点和地面控制站之间较长的链路连接时间.文献[9]提出了无人机网络分布式网关选择算法.该算法考虑到了分区边界对无人机稳定性的影响并建立了数学模型,因此其节点稳定性的计算更能反映无人机链路实际的连接情况.但是,该算法在选择网关时首先从满足稳定性阈值要求的节点中选出潜在网关,然后使用随机延迟机制从潜在网关中随机产生网关节点.因此最终产生的网关很可能不是稳定性值最大的节点,甚至存在另外的潜在网关节点的稳定性值比最终产生的网关节点稳定性值大很多,这样就会造成下一轮的网关节点选择过程中可能会再次将网关节点切换到稳定性值更大的节点,显然增加了不必要的网关节点切换次数,从而带来更长的通信延迟并降低了网络整体的吞吐量.

图1 无人机自组网网络模型Fig.1 Network model of UAV Ad Hoc networks
文中通过对相关文献的研究,提出了一种基于无人机-地面控制站链路状态预测的网关选择算法.首先,该算法中无人机根据自身历史位置记录信息得出无人机与地面控制站之间链路状态历史信息,建立马尔科夫预测模型用于计算该链路状态从“连通”到“连通”马尔科夫预测概率;其次,构建基于无人机运动趋势的无人机-地面控制站链路状态预测的数学模型,通过无人机近期的运动趋势记录和该预测概率计算模型得出基于近期运动趋势的预测结果,之后,综合基于无人机活动模型的预测结果和基于无人机近期运动趋势的预测结果得出最终的无人机-地面控制站链路状态预测概率.最后,在潜在网关成为网关的过程中采用了函数计时机制,从潜在网关的产生到其广播网关通告消息的延迟时间根据无人机节点稳定性和无人机与地面控制站链路状态预测结果加权计算得出,无人机节点稳定性和无人机-地面控制站链路预测概率越大则计算出的延迟时间越小,因此可以选择出参数最优的节点作为网关节点.由此选出的网关节点可以较长时间的在地面控制站通信范围内持续工作,减少切换次数,提高无人机自组网通信的稳定性,降低无人机网络高动态特性给无人机与地面控制站数据传输的通信时延和吞吐量带来的不利影响.
2 人机-地面控制站链路状态预测机制
2.1 基于无人机节点活动模型的预测
在无人机网络中,一架无人机的移动通常是由其任务驱动的,大多数无人机的位置与地面任务有关,部分无人机可能在大部分的时间内在地面控制站的通信范围内执行任务,部分无人机可能在小部分时间内地面控制站的通信范围内执行任务,如图2所示为某无人机历史轨迹示意图,可知该无人机执行任务的区域大部分都在地面控制站的通信范围内,我们可以根据无人机历史位置信息和当前时刻无人机的位置情况来预测未来一段时间内无人机仍将处于地面控制站的通信范围的概率大小.我们把无人机和地面控制站之间的链路状态分为“连通”和“中断”,简称“通”和“断”,则可以根据无人机当前时刻与地面控制站链路的状态和历史信息来预测未来一段时间内无人机与地面控制站链路的状态.因为只有当无人机和地面控制站之间的链路畅通时才可以被选为网关,因此网关的首要条件就是当前时刻要在地面控制站的通信范围内,故我们对无人机-地面控制站链路状态的预测主要是为了得到“通”到“通”的条件预测概率,这里根据马尔科夫预测模型的思想,提出基于马尔科夫的无人机-地面控制站状态活动模型,该模型考虑两个相邻时间段无人机-地面控制站链路状态间的转换,对无人机-地面控制站链路状态的历史记录进行建模,由链路状态转移情况求得链路状态一步转移概率.
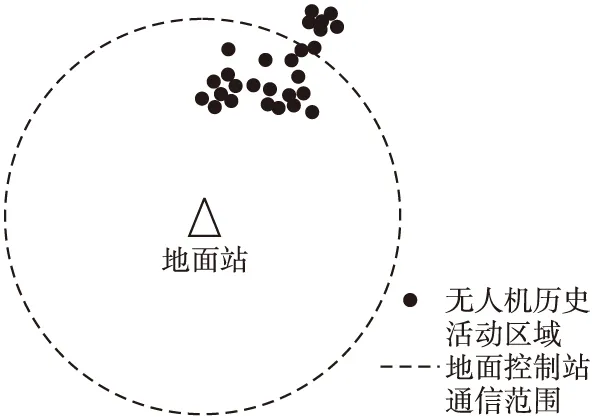
图2 无人机历史轨迹示意图Fig.2 History track of UAV
在本文中,若无人机在地面控制站的通信范围内就默认为无人机与地面控制站之间的链路状态处于“畅通”的状态,因此可以根据无人机的位置信息可以得到无人机和地面控制站之间的链路状态信息.
表1 无人机-地面控制站链路状态抽样记录
Table 1 UAV-GCS link state sampling record
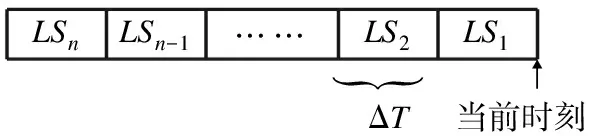
LSnLSn-1……LS2LS1 }ΔT 当前时刻
表2 无人机-地面控制站链路状态转移情况
Table 2 UAV-GCS link state transition
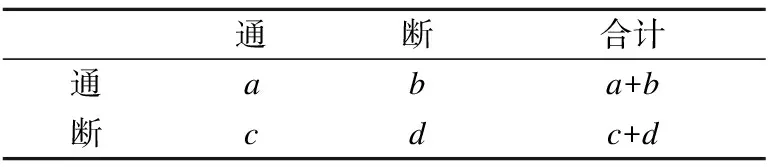
通断合计通aba+b断cdc+d
表3 无人机-地面控制站链路状态一步转移概率
Table 3 UAV-GCS link state transition one-step
transition probability
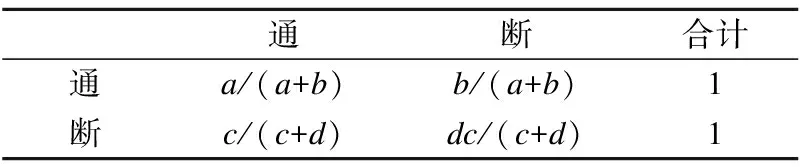
通断合计通a/(a+b)b/(a+b)1断c/(c+d)dc/(c+d)1
从当前时刻开始,根据无人机的历史位置记录信息进行抽样可以得出无人机的链路状态信息,表1为无人机链路状态抽样记录情况,抽样时间间隔为ΔT,表示无人机-地面控制站链路状态,可以为“通”或者“断”,LS1至LSn表示n次无人机-地面控制站链路状态的抽样结果;抽样间隔可以根据实际情况取适当大小的值,若连续两次抽样中无人机-地面控制站链路状态都为“通”则认为在抽样间隔时间ΔT内该链路状态为“通”,否则认为该链路状态为“断”.
PMar=P(“通”→“通”)=P11
(1)
2.2 基于无人机运动趋势的预测
从宏观角度来看,移动对象至目标位置的距离应越来越近[11],若无人机在近期一段时间内距离地面控制站越来越远则无人机将要离开地面控制站通信范围内的概率会较大,反之若无人机在近期一段时间内距离地面控制站越来越近则无人机将要离开地面控制站通信范围内的概率会较小.通过无人机与地面控制站之间距离的变化量可以反映无人机的运动趋势[12],另外,无人机距离地面控制站越近其在未来时间里继续处在地面控制站通信范围的可能性就越大,反之,当无人机处于地面控制站的通信LS半径的边缘时其在未来时间离开地面控制站通信范围的可能性就较大.因此,我们可以建立基于无人机运动趋势的无人机-地面控制站链路状态预测模型,如下.
以当前时刻为起点,对最近历史时刻无人机与地面控制站之间距离记录情况进行抽样,得到的距离集合序列为D={d1,d2,…,ds},其中d1为当前时刻无人机与地面控制站之间的距离,之后依次为历史时刻的距离抽样,由于反映的是无人机节点近期的运动趋势,所以抽样间隔需要根据实际情况取较小的值.
相对于地面控制站而言的无人机运动趋势可由位置和位置变化量两方面因素表示,如下所示.
1)近期节点位置变化量
PCF表示位置变化量因素,如公式(2)所示;其中,Δk为相邻两个距离抽样的变化量,其计算如公式(3)所示,Δd>0表明无人机在接近地面控制站,Δd<0表明无人机在远离地面控制站;Δdmax为抽样时间间隔Δt内无人机以最大速度vmax飞行的路程长度,如公式(4)所示.
PCF反映的是抽样距离集合中所有相邻抽样差值的平均值的情况.PCF大于零表明近期无人机与地面控制站的距离总体上来说越来越近,PCF小于零表明近期无人机与地面控制站的距离总体上来说原来越远,当PCF为零或者接近零的时候表明近期无人机与地面控制站的相对位置关系比较稳定.
(2)
Δd=dk+1-dk(k≤s)
(3)
Δdmax=Δt×vmax
(4)
2)当前时刻节点位置情况
PF表示位置因素,如公式(5)所示,d1表示无人机当前时刻距离地面控制站的距离,dGCS表示无人机与地面控制站的最大通信距离.
PF反映的是当前时刻无人机与地面控制站的距离对未来时间里无人机-地面控制站链路状态测影响.
(5)
综合PCF和PF,可以得出基于运动趋势的无人机链路状态预测结果PMov,如公式(6)所示,可知,PCF和PF的理论上的取值范围是[0,1],因而PMov的取值范围也是[0,1].
(6)
当PCF≤0时,PCF值越小则表明无人机节点整体远离地面控制站的运动趋势越明显,并且无人机离地面控制站越远则PF的值越大,最终PMov的值就越小,此时无人机在未来一段时间里继续与地面控制站的链路保持连接的概率就越小,反之亦然.
当PCF>0时,PCF值越大则表明无人机节点整体接近地面控制站的运动趋势越明显,并且无人机离地面控制站越近则PF的值越大,最终PMov的值也越大,此时无人机在未来一段时间里继续与地面控制站的链路保持连接的概率就越大,反之亦然.
总之,PMov的值越大,在未来一段时间里无人机-地面控制站链路状态将继续处于“通”的可能性就越大;PMov的值越小,在未来一段时间里无人机-地面控制站链路状态将继续处于“通”的可能性就越小.
2.3 无人机-地面控制站链路状态预测的综合概率
结合基于无人机活动模型的预测结果和基于无人机运动趋势的预测结果可以得到无人机-地面控制站链路状态在未来时间段仍将继续处于“通”的综合概率,如公式(7)所示,通过这两个预测模型结果结合得到的预测概率可以刚准确的预测未来时间里无人机与地面控制站之间链路的来连接情况.与通常意义上的概率不太一样,该综合概率的值仅是表征无人机-地面控制站将继续保持“通”的可能性的大小的相对性,不同的无人机节点相比,Ppre越大则无人机在未来时刻将继续保持与地面控制站的链路连通的可能性就越大.
(7)
3 函数计时机制
作为网关节点除了要求无人机与地面控制站之间的链路保持畅通外,还要求无人机与其它的邻居无人机节点链路可以保持畅通,即无人机与邻居节点的链路越稳定则越适合充当网关节点.现有移动自组网和无人机自组网中进行簇头选择或者网关选择都会定义节点稳定性,从而选出与邻居节点链路保持时间较长的节点作为网关节点,以减少节点的高速移动特性给通信带来的不利影响.本文用si表示无人机节点i的稳定性,如公式(8)所示.
si=∑j∈EiLij
(8)
其中,Ei为节点的i的邻居节点集合,Lij为节点i和邻居节点j之间的链路可用性,可以通过文献[10]中的计算方法进行计算得出,邻居节点的位置信息通过HELLO消息携带得到.
无人机自组网中,在地面控制站通信范围的节点都可以是候选网关节点,当候选网关节点的稳定性值符合一定条件时则被选为潜在网关节点,潜在网关节点当中将会产生唯一一个网关节点广播网关通告消息GWADV((Gateway Advertisemen).本文由潜在网关被选举为网关的过程中使用了函数计时机制,即所有的潜在网关节点将会延迟一定的时间,延迟时间是通过节点的稳定性值和无人机-地面控制站链路状态预测的结果加权计算得出,延迟时间最小的潜在网关节点将会最先广播GWADV消息,其它潜在网关节点收到GWADV消息之后将停止计时器计时,不再发送GWADV消息.网关通告消息的格式如表4所示,GW_Seq_num为网关节点的序列号,Sder_pos为网关节点的位置,stability为网关节点的稳定性值.无人机自组网中的无人机节点通过GWADV消息可以获知当前网关节点的稳定性信息.
表4 网关通告消息结构
Table 4 Structure of gateway advertisement message

GW_Seq_numSder_posstability
节点稳定性值相差较小无人机节点作为网关来说其性能基本相当,因此应该把节点稳定性值相差不大的节点同等对待,另外,由于节点稳定性值相较于延迟时间的值来说太大,不方便进行延迟时间的计算,因此我们在计算延迟时间是将其转换为合适大小的值再进行计算.这里根据节点的稳定性值将无人机节点稳定性进行了分级,如表5所示,Δ1、Δ2、Δ3和Δ4为分级的阈值,λ表示不同级别稳定性节点对应的不同级别的参数且λ1<λ2<λ3<λ4,Tconst为调节常数(可以使延迟时间落在合适的区间内);潜在网关节点i的延迟时间的计算如公式(8)所示,从公式中可以看出,无人机的节点稳定性和无人机-地面控制站链路状态预测的概率越大,则延迟时间越小.
在“图书馆组织转型的方向与路径”主题版块中,来自伦敦玛丽女王大学、荷兰鹿特丹伊斯拉谟斯大学、西弗吉尼亚大学、台湾大学、新加坡管理大学、岭南大学、华中师范大学等海内外高校图书馆馆长围绕大学图书馆的组织重构和转型方向、馆员角色评估与职业规划、图书馆未来发展趋势等方面展开了探讨,
Ti=Tconst*λ*(1-Ppre(i))
(9)
表5 节点稳定性分级
Table 5 Grade node stability
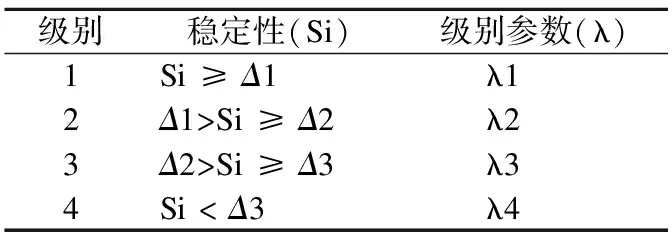
级别稳定性(Si)级别参数(λ)1Si ≥ Δ1λ12Δ1>Si ≥ Δ2λ23Δ2>Si ≥ Δ3λ34Si < Δ3λ4
4 基于无人机地面控制站链路预测的网关选择算法
分布式的算法具有可靠和控制开销较少的特点,本文所提算法采用的是分布式的算法,即无人机网关的选择参数由节点本身进行计算,随后根据计算结果自动产生网关节点.
根据以上的工作,提出了基于链路预测的网关选择算法,算法的流程如图3所示,以节点i为例,该算法具体操作步骤如下:
步骤1.无人机节点i计算自身的节点稳定性si;
步骤2.检验该无人机节点稳定性值是否满足条件si-sk≥ε,其中sk为网关节点k的稳定性值,ε为网关切换阈值;
步骤3.若不满足条件则算法结束,否则继续执行下面步骤;
步骤4.将节点i置为潜在网关节点;
步骤5.潜在网关节点i计算延迟等待时间Ti并开始计时,若计时期间节点收到新的网关通告消息则停止计时并更新网关节点id,否则经过计时时间Ti后再次检查是否满足步骤2中的条件,若仍满足则广播网关通告消息GWADV,否则计算算法不广播网关通告消息.
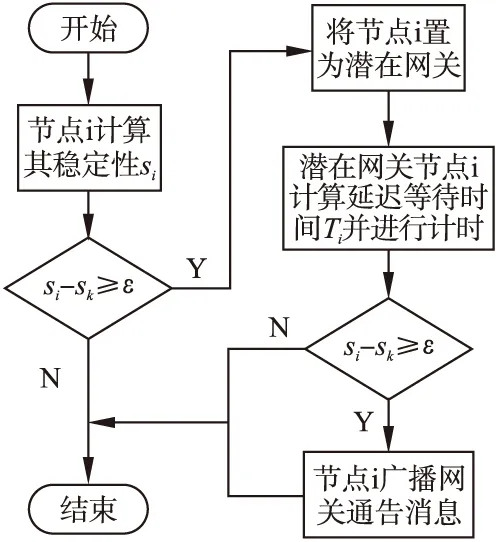
图3 网关选择算法流程Fig.3 Flow of gateway selection algorithm
由于不同的无人机节点其无人机-地面控制站链路状态预测概率几乎不会相同,各个无人机节点计算延迟等待时间可以认为是不相同的,因此既可以保证同一个网络分区只有一个前网关广播网关通告消息,又可以保证选择参数最大的节点成为网关节点.
5 图和表的要求仿真验证与性能分析
5.1 仿真参数设置
本文采用OPENT Modeler 14.5 仿真软件对提出的基于无人机-地面控制站链路状态预测算法进行了仿真验证,在相同仿真模拟场景下,分别与CONID算法、近空间无人机分簇算法、无人机网络分布式网关选择算法进行了比较和分析.主要仿真参数如表6所示.
5.2 仿真结果分析
5.2.1 平均网关持续时间
在不同的节点移动速度下,比较了四种算法的网关节点的平均持续工作时间,进行了多次重复实验并取结果的平均值.从图4可以看出,在相同的速度下,使用本文所提算法选出的网关比另外三种算法下的网关节点的平均持续工作时间明显要更长.这是由于使用本算法中无人机-地面控制站链路状态预测机制得出的网关节点在地面控制站通信范围内停留的平均时间更长,减少了因无人机离开地面控制站通信范围而导致的网关切换.另外使用函数延迟机制可以使选择参数最大的节点成为网关,避免了从潜在网关中随机产生的网关的选择参数非最优导致的不必要的网关切换. 因为倘若网关
表6 主要仿真参数
Table 6 Grade node stability
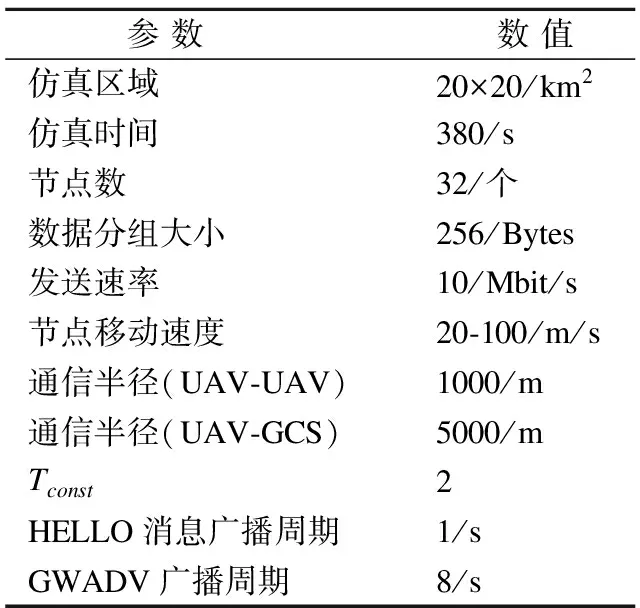
参 数数 值仿真区域20×20/km2仿真时间380/s节点数32/个数据分组大小256/Bytes发送速率10/Mbit/s节点移动速度20-100/m/s通信半径(UAV-UAV)1000/m通信半径(UAV-GCS)5000/mTconst2HELLO消息广播周期1/sGWADV广播周期8/s
选择参数最大的潜在网关节点没有被选为网关且其节点稳定性比被选为网关的节点大很多,则在下一轮网关选择时很可能将再进行网关的切换.此外,对于所有算法来说,节点速度越大,平均网关持续时间越小,这是由于节点速度越大,网络拓扑结构变化越快,节点的稳定性变化就越大,从而导致网关更频繁的切换;另外网关节点速度越大,其处于在地面控制站通信范围的时间就越短,网关的持续时间就越短.

图4 平均网关持续时间Fig.4 Average gateway duration
5.2.2 数据平均传输时延
在相同的仿真环境下,比较了分别使用四种算法时数据从无人机节点到地面控制站的平均传输时延,其中发送数据的节点覆盖整个无人机网络.从图5可以看出,在使用四种算法的情况下,随着无人机节点的速度越来越大,平均传输时延也越来越大,此外,相比于其它三种算法,在使用本算法的情况下的平均传输时延明显要比其它三种算法要低.网关切换次数增多是导致这一结果的重要因素,因为在进行网关切换时数据的传输时延会受到较大的影响;发生网关切换后,旧网关节点已经收到的数据将不能直接发往地面控制站而是发往新的网关,此外还有正在发往旧网关路由上的数据也要先到达旧网关后才能转发到新网关,显然,这些数据需要转发更多的次数才能到达地面控制站,从而导致更高的传输时延.因此,本算法通过减少增加网关持续时间可以降低无人机自组网和地面控制站通信时的数据传输时延,尤其无人机网络向地面传输收集到的实施侦察数据来说,数据的传输量大且对时延敏感,其提升效果也会比较大.

图5 平均传输时延Fig.5 Average transmission delay
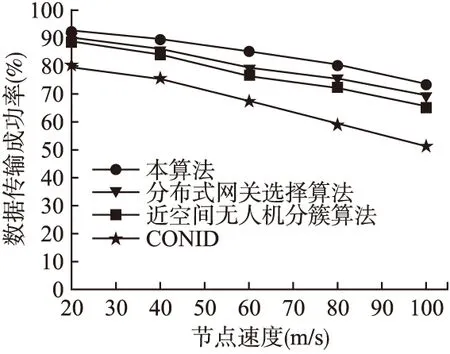
图6 平均传输时延Fig.6 Average transmission delay
5.2.3 数据传输成功率
在不同的移动速度下,比较了使用四种算法的情况下数据从无人机网络传输到地面控制站的成功率.从图6中可以看出,随着节点移动速度的增加,四种算法的数据传输成功率都在下降,这是由于在更高的节点移动速度情况下,网关节点的切换更频繁,由5.2.2中的分析可知这将会导致更多的数据转发次数增多,在高速移动的网络中,链路稳定性较差,更多的转发将会导致丢包数量增多.相比于其它三种算法,本算法在数据传输成功率上均是最高,这得益于本算法较另外三种算法其网关持续时间更高.而且还可以知道,由于CONID算法没有考虑移动节点的高移动性,因此在无人机网络中其性能最差.
6 结束语
为了应对无人机自组网的节点高速移动特性给无人机网络和地面控制站通信带来的问题,文中提出了一种基于无人机-地面控制站链路状态预测的网关选择算法.文中建立了无人机-地面控制站链路状态预测时的数学模型,并且通过权函数计时机制兼顾了无人机节点稳定性和无人机-地面控制站链路情况,最终使网关选择参数最大的节点成为网关节点.虽然仿真结果表明,文中所提算法在平均传输时延和传输成功率等方面性能较现有的算法有所提升,但无人机节点稳定性计算等方面仍然有着优化的空间,此外,也可以针对无人机网络不同的任务需求增加额外的考虑因素,比如说剩余能量等.
