轮胎式集装箱龙门起重机大车疑难故障解决方案
2020-05-06高学柳刘杨朱德平
高学柳 刘杨 朱德平


轮胎式集装箱龙门起重机(以下简称“轮胎吊”)的主要工作机构包括起升机构、大车机构和小车机构,其中,大车机构的主要作用是实现工作场区轮胎吊大车方向的变换。大车机构故障会造成轮胎吊停止工作,从而导致集装箱积压,影响场区利用率,降低船舶作业效率。本文针对轮胎吊大车机构存在的起步困难和纠偏困难两种疑难故障,从机械原理和电气原理入手分析故障原因并提出故障解决方案,从而排除集装箱码头生产作业安全隐患。
1 轮胎吊大车起步困难故障及其解决方案
1.1 故障现象
在轮胎吊停机后再次起步的过程中,变频器报过电流故障,控制电源跳闸,司机须操作故障复位后才能再次起步。每次轮胎吊停机后,司机需要重复上述操作10次以上,起步时间一般超过20 min,冬天超过30 min,严重影响轮胎吊作业效率;此外,频繁过电流会缩短变频器和电机的使用寿命。通过DriveWindow软件监测变频器的电流、转矩和转速波形发现:在大车起步过程中,大车电流和转矩迅速升至最大值并持续短暂时间后,控制电源跳闸。
1.2 故障解决
青岛前湾集装箱码头有限责任公司(以下简称“青岛前湾集装箱码头”)的8台RC40.5/60型轮胎吊自2002年投产后一直存在大车起步困难故障。该型号轮胎吊大车电控系统采用的可编程逻辑控制器型号、变频器型号、电机型号和控制方式均与公司另外8台LJ1000型轮胎吊相同,但LJ1000型轮胎吊却不存在大车起步困难的问题。为此,比较LJ1000型轮胎吊与RC40.5/60型轮胎吊的大车机械传动参数和电气传动参数,判断RC40.5/60型轮胎吊的机械传动和电气传动设计和调试数据是否合理。
1.2.1 机械传动方面
轮胎吊大车电机过电流与机械传动参数中的减速箱速比、链条传动速比和总传动速比有关。从RC40.5/46型轮胎吊与LJ1000型轮胎吊大车主要机械传动参数比较(见表1)可见,前者的总传动速比比后者大9.623。根据功率=转矩捉撬俣龋诠β屎偷缁俨槐涞那榭鱿拢艽俦仍酱螅蚪撬俣仍叫。涑鲎卦酱蟆4踊荡慕嵌壤纯矗琑C40.5/46型轮胎吊比LJ1000型轮胎吊在大车起步方面更具优势;因此,判断RC40.5/46型轮胎吊在大车机械传动设计方面没有问题。
1.2.2 电气传动方面
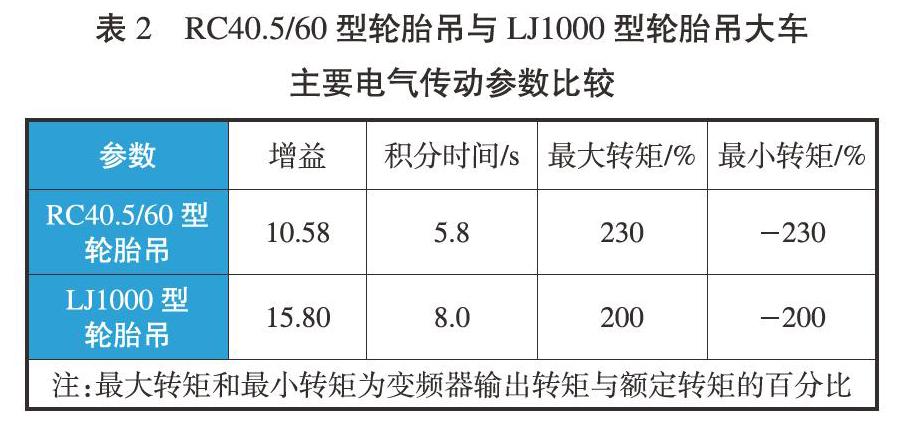
轮胎吊大车电机电流由变频器控制。从ACS600变频器控制功能图可知,与电机电流相关的控制参数主要有增益、积分时间、最大转矩和最小转矩等,其中:增益和积分时间参数主要影响电流随速度偏差变化的响应速度;最大转矩和最小转矩参数决定变频器输出的最大和最小转矩,间接影响电流的最大值和最小值。
从RC40.5/46型轮胎吊与LJ1000型轮胎吊大车主要电气传动参数比较(见表2)可见:RC40.5/46型轮胎吊的增益和积分时间设定参数值较小,最大转矩和最小转矩设定参数值偏大,而增大增益参数值可以加快电流响应速度,减小最大转矩和最小转矩参数值可以降低变频器输出电流。为此,将RC40.5/46型轮胎吊的增益、最大转矩和最小转矩参数值修改为与LJ1000型轮胎吊相应参数值相同。经司机试车验证,变频器过流跳闸现象消失,大车起步非常平稳。通过DriveWindow软件再次监测变频器的电流和转矩波形发现:大车起步时的电流很小,电机启动顺畅,不存在过流跳闸现象。
2 轮胎吊大车纠偏困难故障及其解决方案
2.1 大车纠偏原理
轮胎吊大车机构主要由海侧4个行走轮和陆侧4个行走轮组成,其中:陆左和海右第一个行走轮为主动轮,其他行走轮为从动轮。受场地平整度和两侧轮胎大小不同的影响,在变频器輸出转矩相同的情况下,大车在行走过程中因两侧行走轮的速度不一致而出现跑偏现象;此时,司机需要频繁纠偏,即给速度较慢一侧电机实施速度补偿,补偿值一般为给定速度的10%,直到大车跑正。如果被纠偏的电机速度与另一个电机速度无偏差,大车将向跑偏的方向继续行走,导致纠偏失败;此时,若司机不及时停车,易引发轮胎吊与箱垛碰撞事故。可见,大车纠偏对轮胎吊的安全运行至关重要。
2.2 大车纠偏困难故障原因及解决方案
2.2.1 机械原因及排除
导致轮胎吊大车纠偏困难的机械原因包括:(1)蛇形联轴器断裂,导致电机带不动负载;(2)大车链条过松,引起电机过流;(3)大车减速箱内部齿轮损坏,导致电机过载;(4)大车轮轴轴承损坏,导致电机过载;(5)大车制动器间隙过小,导致制动器不能完全打开,从而引起电机过载;(6)大车单侧4个轮胎未沿直线安装,尤其是主动轮安装不正,引起大车跑偏和纠偏困难。针对以上机械原因引起的大车纠偏困难,可以采取逐级排除的方式,即逐级机械分离电机和机械联结装置后,再次测量电机和电流波形是否正常,逐级查找故障原因后排除故障。
2.2.2 电气原因及排除
(1)速度给定回路出现故障,主要表现为纠偏手柄损坏或可编程逻辑控制器输入模块损坏,导致两侧速度给定无偏差。该故障可以通过司机在操作纠偏手柄时在线观察可编程逻辑控制器程序来排除。
(2)速度检测回路故障,主要表现为编码器、编码器接口板以及两者间的线路故障,导致大车两侧速度反馈异常,两侧变频器输出力矩和电流异常,进而导致大车纠偏失败。该故障可以通过将电机控制方式由闭环状态改为开环状态后观察故障现象来排除。
(3)大车电机主接触器故障,主要表现为接触器主触点损坏引起电机过流或缺相,导致电机工作异常,进而造成大车纠偏失败。该故障可以通过拆解接触器或利用万用表测量来排除。
(4)大车电机故障,主要表现为电机线圈绝缘损坏、电机轴承损坏以及电机与变频器之间线路故障等。该故障可以通过观察电机轴在电机运转过程中是否上下窜动和用绝缘表(摇表)测量电机相间和单相对地绝缘电阻来排除。
2.3 大车纠偏困难故障案例分析
(1)故障现象 青岛前湾集装箱码头QGLT40.5- 5/6型轮胎吊出现大车纠偏困难故障:大车在跑动过程中向海侧跑偏,并且向陆侧纠偏困难,尤其是当小车停在海侧位置时,无法向陆侧纠偏。
(2)故障原因 在大车纠偏过程中,海侧电机的电流和转速均超过陆侧电机的电流和转速,当司机向陆侧纠偏时,海侧电机与陆侧电机存在转速偏差且海侧电机的转速更快,从波形上分析纠偏是正常的;但实际上,海侧大车移动速度并没有超过陆侧大车移动速度,从而导致纠偏失败。由此可见,该故障是由机械传动方面的原因引起的。
(3)故障排除方法及过程 首先,拆检海侧大车减速箱和蛇形联轴器,未发现异常现象;然后,采用经纬仪测量海侧4个轮胎和海侧大车鞍梁的平行度,发现海侧主动轮与其他3个轮胎不在同一条直线上,其与参考线的距离与其他3个轮胎相比偏差。由图1可见:大车主动轮的转速方向与大车行走线有角度 ,大车在理想状态下的移动速度为V1=V cos,因此海侧大车速度始终比陆侧慢,导致大车向海侧跑偏;而纠偏后海侧大车速度只有V2=(1+ 10%) V cos,因此纠偏困难。鉴于此,调整大车转向油缸,使大车海侧主动轮与大车鞍梁平行,从而排除纠偏困难故障。
3 结束语
本文针对轮胎吊大车起步困难和纠偏困难故障,通过轮胎吊在线监控软件采集轮胎吊大车起步过程和纠偏过程中的电机转速和电流波形,找出故障原因并快速、准确地排除故障,实现大车平稳启动和高速运行,从而避免轮胎吊撞箱事故,提高设备装卸效率,保障集装箱码头作业安全。
(编辑:曹莉琼 收稿日期:2020-01-02)
