C-V2X应用场景的算法建模及评价模型综述
2020-05-06董馨南洋陈博冯舒刘晓东
董馨 南洋 陈博 冯舒 刘晓东
(中国第一汽车股份有限公司 智能网联开发院,长春 130013)
主题词:C-V2X 应用场景 算法建模 算法评价模型 算法性能
缩略语
C-V2X Cellular-Vehicle to Everything(车联网)
3GPP 3rd Generation Partnership Project(第三代合作伙伴计划)
ITS Intelligent Transportation System(智能交通系统)
V2V Vehicle to Vehicle(车与车)
V2I Vehicle to Infrastructure(车与基础设施)
V2P Vehicle to Pedestrian(车辆与行人)
ICW Intersection Collision Warning(路口碰撞预警)
HV Host Vehicle(主车)
RV Remote Vehicle(远车)
BSM Basic Safety Message(基本安全消息)
EMMC Embedded Multi Media Card(嵌入式多媒体卡)
1 前言
C-V2X(Cellular-Vehicle to Everything)作为新一代信息通信技术,旨在实现车与人、车与车、车与路、车与服务平台的全方位网络连接[1]。C-V2X与生俱来的优势包括宽视野、低干扰、低时延、更稳定、更兼容可让当下的交通环境变得更安全,并使未来的自动驾驶成为可能。
宽视野,即C-V2X依靠蜂窝网络进行通信,带来的非视距(NLOS)通信能力即绕过障碍物感知环境的能力,使得驾驶者在转弯处、前车阻挡时、夜晚和恶劣天气里,都能进行更好地预测和决策。低干扰,即CV2X直接利用统一的专用ITS频谱支持车对车、车对行人、车对基础设施直接通信,就像开辟了一条VIP通道,为安全保驾护航。低时延,即C-V2X是面向低延迟直接通信而设计,不依赖网络协助。C-V2X无线直连通信可提供更大范围的通信能力和增强的可靠性,而摆脱蜂窝网络的协助或覆盖。更稳定,即无线蜂窝技术就是为支持高速而设计的,3GPP组织提出的R14标准针对高速车辆用例进行了增强,在不同道路状况下支持相对速度高达500 km/h,另外,3GPP还定义了严格的最低性能要求规范,以确保可预测、统一且有保证的体验,支持与道路安全同等重要的应用。更兼容,即C-V2X是唯一具有清晰5G演进路径的V2X技术,并后向/前向兼容。C-V2X演进将纳入5G新空口特性,为自动驾驶和先进用例提供高吞吐量、宽带载波支持、超低延迟和高可靠性。此外,它可以提供更丰富的差异化体验。随着进入5G和自动驾驶的世界,这一切都将让汽车成为一个最主要的用例。C-V2X借助于人、车、路、云平台之间的全方位连接和高效信息交互,支持交通安全类、效率类和信息服务类以及自动驾驶协同类多类应用[1],多类应用的实现是支撑V2X技术有力的保障,但目前缺乏对实现的标准评估。利用仿真测试环境,对应用场景算法进行建模,并建立一个标准的评估体系,可针对C-V2X应用场景进行多维度的性能评价,以输出准确的结果、有效利用C-V2X通信特性达到物尽其用。
2 C-V2X典型应用场景需求分析及核心算法
2.1 C-V2X典型应用场景需求分析
参考中国汽车工程学会的行业标准(T/CSAE 53-2017)《合作式智能运输系统车用通信系统应用层及应用数据交互标准》[2]中选出的涵盖安全、效率、信息服务的17个典型应用作为第一期应用。

表1 V2X应用场景列表[2]
针对表1中的每个场景,都需要进行详细的场景分析,从如下维度进行:场景详细描述、前置条件、输入/输出、事件流程、硬件要求、功能要求,并依据分析的情况对场景进行设计并建立算法模型。
2.2 C-V2X应用场景需求分析实例
本节针对表1中交叉路口碰撞预警(Intersection Collision Warning,ICW)应用场景,详细分析交叉路口工况下利用V2X技术如何有效实现避撞。
主车(Host Vehicle,HV)驶向交叉路口,与侧向行驶的远车(Remote Vehicle,RV)存在碰撞危险时,ICW应用将对HV驾驶员进行预警。本应用适用于城市及郊区普通道路及公路的交叉路口、环道入口、高速路入口等交叉路口碰撞危险的预警。应用场景示意图如图1所示。


图1ICW应用场景
前置条件:
定位精度:≤5 m
通信距离:≥150 m
输入:
车载设备:车辆BSM
车辆:车速
输出:
交叉碰撞预警信息
事件流程:
(1)RV发送BSM消息;
(2)HV接收RV的BSM消息;
(3)HV判断RV是否与本车交叉行驶;
(4)HV预测是否与RV存在交叉碰撞危险,若存在发生危险的可能,则向本车的显示终端发送预警信息。
根据以上分析,可得ICW预警条件如下:
●RV处于HV交叉前方(包括交叉左前方和交叉右前方);
●RV与HV间距离小于设定阈值;
●RV与HV达到路口的时间差小于设定阈值;
●HV到达路口的时间小于设定阈值;
●HV行驶速度大于设定阈值。
需同时满足上述所有条件才进行预警,若上述任意一个条件不满足则解除预警。
2.3 C-V2X应用场景核心算法
C-V2X应用场景在设计实现的过程中,需要建立核心算法,将复杂的工况抽象出来,提取出核心的要点,简化预警程序。以交叉路口碰撞预警为例,算法的核心是计算交叉碰撞时间,车辆交叉行驶示意图如图2所示。
如图2所示,主车和远车交叉行驶,两者之间存在交汇点I,根据三角形的正弦定理:
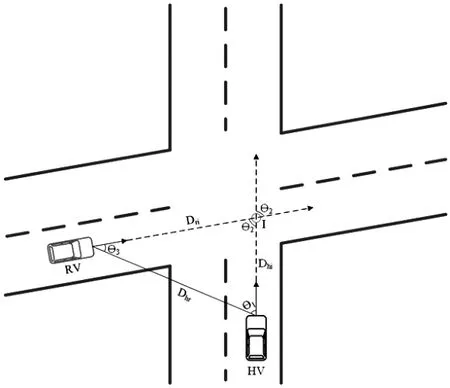
图2 车辆交叉行驶示意

Hh—主车行驶方向角;
Hr—远车行驶方向角;
Hhr—本车到远车的方位角;
Dhr—主车和远车之间的距离。
可计算出主车到交叉点的距离Dhi和远车到交叉点的距离Dri,再根据车辆的速度和加速度,从而计算出车辆到交叉点的时间,通过时间差判断两车是否会发生碰撞。
3 算法建模
依据核心算法,结合Simulink建模工具,可以将算法的核心实现转换成可支持功能逻辑验证的算法模型,明确算法的输入和输出条件,确定算法的逻辑思路。在实现算法建模的过程中梳理出算法的正确性依赖于核心算法的适应场景是否与行业标准一致,算法的鲁棒性取决于性能及边界覆盖度,算法的影响因素依赖于算法自身需要的各种标定量,对于标定量的取值影响算法的精准度。
以交叉路口碰撞预警算法为例,在Simulink中建模思路:
(1)获取主车和远车信息,计算两车间距离,判断距离是否大于阈值,若是则代表距离过远没必要判断;反之继续。
(2)根据两车位置坐标计算两车间的方位角,计算方位角以及远车航向角与主车航向角间的偏移量,根据方位角偏移量计算两车距离在以主车行驶方向为y轴正向的新坐标系下的纵向、横向距离分量,根据远车航向角偏移量计算远车速度在新坐标系下的纵向、横向速度分量。
(3)判断横向距离分量是否为0以及远车横向速度分量是否与横向距离分量同向。若是,则不存在碰撞情况,反之继续。
(4)计算远车完成横向位移所需的时间time1,计算time1时间内远车完成的纵向位移,再加上之前的纵向距离分量,更新纵向距离。
(5)判断纵向距离是否为0以,及远车纵向速度分量是否与纵向距离分量反向,若是,则不存在碰撞情况,反之继续。
(6)计算主车完成纵向位移所需的时间time2,判断time1与time2之间差值的绝对值是否小于阈值,若是,则发出碰撞预警,反之不预警。

图3ICW算法建模
具体算法建模参见图3,用于在算法仿真测试的环境中验证算法功能及按照算法评估模型对算法进行多维度的评价和反馈。
4 算法评估模型
4.1 多维评估模型参数解析
算法的评价模型从大维度上分为算法计算效率和有效性。
算法的计算效率是指算法在编写完成,生成可执行程序后,运行时所需要消耗的资源,资源包括时间资源和内存资源,即时间复杂度和空间复杂度,根据C-V2X应用场景算法的资源使用情况,细分为表2所示的子项。

表2 算法计算效率评价参数
CPU占用率是指算法运行时占用CPU资源的情况,占用率越高,说明算法运行效率较差,反之较好。占用率的高低与CPU强弱有直接关系,因此C-V2X应用场景算法的评价需基于同一硬件平台进行。IO等待时间间接反映CPU占用情况,IO等待时间短,证明算法效率高,反之亦然。
内存占用,即长时间运行内存空间占用正常,无内存泄漏式增长,空间占用不影响系统正常运行,可表明算法设计及实现无缺陷。EMMC存储占用,即存储空间不能异常增长,不能影响系统正常运行,有最大存储限定。
算法有效性则分为正确性、鲁棒性、场景影响因素。具体子项如表3所示。

表3 算法有效性评价参数
算法的有效性是从算法实现的功能角度分析,考虑所有可能影响算法结果的因素,从正常情况到边界测试、压力测试,再综合车辆行驶过程中的环境及自身条件因素,合理评价算法模型的优劣。
算法的优劣直接影响C-V2X应用场景实现的品质,场景的实现依托于输入信息的准确度、及时性以及算法的效率和处理信息的精准度,因此设计算法评价模型目的就在于对每个算法有一个客观的评价。
4.2 实例评估结果
以交叉路口碰撞预警算法为例,根据上述算法评价模型,按照标准测试数据、最大测试数据、最小测试数据进行实际测试,测试结果如表4所示。

表4 算法各因子评价结果
综合评价交叉路口碰撞预警算法的评价结果是通过。至此,可以验证算法的评估模型是有意义,并且可以执行的。但在后续的工作中还需要更细化每个因子的权重,使算法评价模型能够更准确地评价每个应用场景算法。
5 结束语
通过梳理C-V2X典型应用场景,核心算法设计,算法建模以及算法评价模型的研究,对C-V2X协同预警功能的设计、实现及评价形成完整的流程链条,推动红旗车型搭载自主C-V2X功能场景算法,为量产功能验证提供技术支撑。
C-V2X技术的发展逐步在向协同感知、协同控制方向发展,随着参与车控的触角越来越深入,需要算法在功能和性能上都更能适应高速及城市道路交通中复杂及危险的工况场景,因此就需要成体系的评价模型,能够多维度对算法进行评价,保证算法的正确性及覆盖率,继而保证V2X功能的完备性。
