GPS多接收机组合的共视时间比对技术研究
2020-04-29董绍武武文俊王威雄袁海波
张 健 董绍武 武文俊 王威雄 郭 栋 袁海波
(1.中国科学院国家授时中心,陕西西安 710600;2.中国科学院大学,北京 100049;3.中国科学院时间频率基准重点实验室,陕西西安 710600;4.中国科学院大学天文与空间科学学院,北京 100049)
1 引 言
当前国际标准时间是协调世界时(UTC)[1],远距离高精度时间比对是UTC计算的主要环节之一,1980年Allan将GPS共视法(GPS CV)这项技术用于高精度时间传递,1983年被国际时间局(BIH)用于UTC的计算[2],为便于观测数据交换,以及提高共视比对精度,1994年,Allan等人在Metrologia发表的“GPS定时接收机软件标准化技术指南”,统一了共视接收机软件的处理过程和观测文件的格式。随着科技的迅速发展,诸多行业对时间比对精度提出了更高要求。BIPM的Zhiheng Jiang等人研究表明单接收机链路存在长期的不稳定性[3],为了进一步提高GPS共视在时间比对中的各项性能指标,国内外诸多学者对各种组合方式开展了研究,Zhiheng Jiang等人对多手段(GPS和TWSTFT)组合进行试验和性能分析[4],Aurelie Defraidne和Pascale Defraigne对多GNSS系统(GPS+GLONASS)组合进行了研究试验[5]。近年来,多接收机组合也成为时间比对技术的研究方向之一,我国台湾地区中华电信股份有限公司(TL)的林信严等人提出多接收机系统模型[6],建立了TL与日本国家信息与通信技术研究所(NICT)多接收机短基线时间比对链路,分析多接收机链路比对结果。
本文基于中科院国家授时中心(NTSC)和德国物理技术研究院(PTB)各自保持的国家时间基准[7],利用NTSC的两台接收机组成一个多接收机系统,利用PTB的三台接收机组成另一个系统,进行多接收机组合的长基线时间比对链路(NTSC-PTB)试验,并对结果进行分析与评估。
2 GPS共视原理
GPS共视的基本原理是两个站同时观测一颗或多颗GPS卫星,GPS接收机可以获得地面和卫星之间的伪距观测值,对伪距观测值中的对流层时延、电离层时延和Sagnac效应等进行修正后,得到本地系统时间和GPS系统时(GPST)之间的时间偏差,将两站数据进行交换并作差可得两站的时间比对结果,其原理如图1所示。
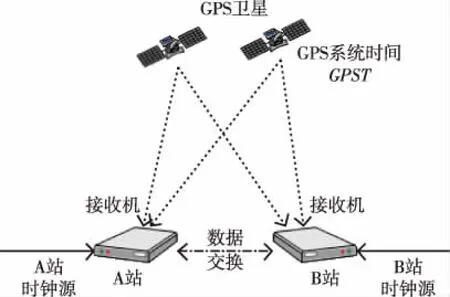
图1 GPS共视原理图Fig.1 principle of GPS CV
假设A站的时间为tA,B站的时间为tB,GPS系统时间为GPST,即
ΔtA=tA-GPST
(1)
ΔtB=tB-GPST
(2)
用式(1)减式(2)可得两地的时间偏差为
ΔtA-ΔtB=tA-GPST-tB+GPST
=tA-tB=ΔtAB
(3)
3 多接收机系统模型及数据处理流程
为提高GPS共视时间比对精度,理想情况下,需研究所有噪声的类型并消除它,但实际上总存在一些延迟无法完全消除,只能利用现有技术手段基础尽量消弱它。本文基于多接收机组合技术,对两个守时实验室各自的多台接收机进行组合,利用NTSC的两台接收机(在BIPM的编号分别为NTP1和NTP3)组成一个多接收机系统,命名为NTE1,利用PTB的三台接收机(在BIPM的编号分别为PT03、PT07和PT09)组成另一个系统,命名为PTE1,建立多接收机系统时间比对,接收机输入的时频信号源分别来自UTC(NTSC)和UTC(PTB)。原理如图2所示。
多接收机系统数据处理的具体方法首先读取A地和B地两个实验室多台接收机各自的观测数据,并提取A地和B两地观测数据中PRN、MJD和STTIME相同的REFGPS值,采用接收机数据融合技术,得到A、B两地多接收机系统的观测数据,利用多接收机系统时间比对将两地数据进行交换并作差即可得到两地钟差。数据处理流程图如图3所示。多接收机系统本地时与GPS时的时间差(REFGPS)是组合中所有经过校准的接收机的REFGPS值等权平均的结果,它的总延迟也会平均化,由于多接收机系统的观测值数量是单接收机的好几倍,而且观测值来自不同的接收机,因此,可以有效地减小观测环节带来的不确定度,所以认为多接收机系统时间比对结果的精度优于单接收机是合理的。
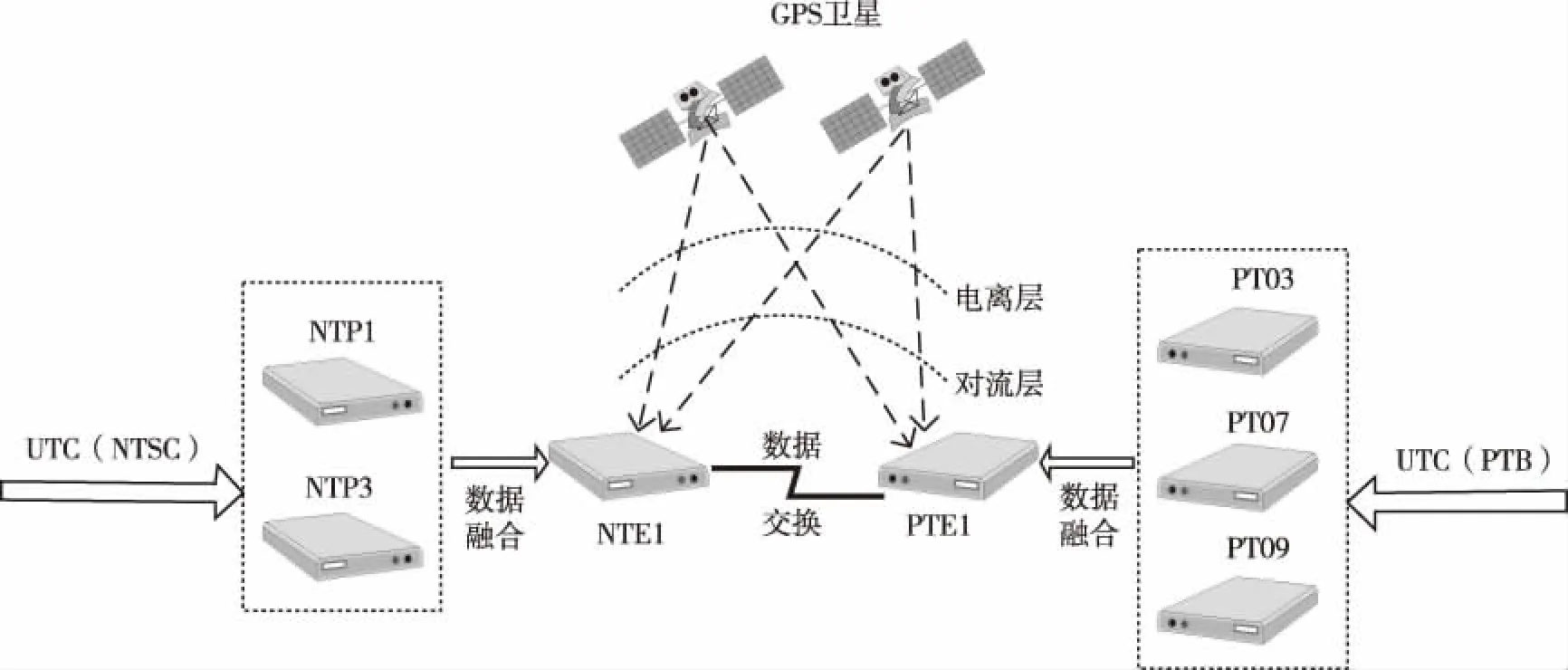
图2 多接收机系统时间比对原理图Fig.2 Comparison principle of multiple receiver system time
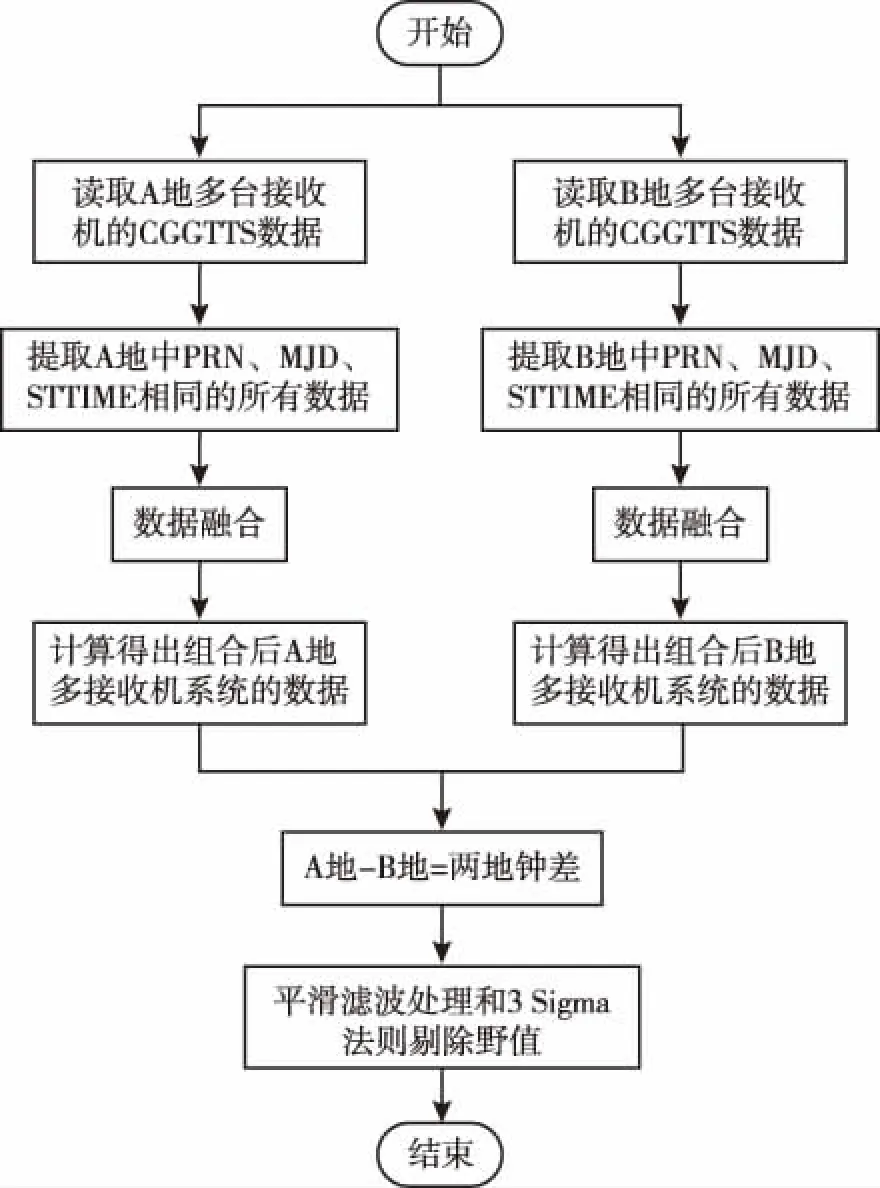
图3 数据处理流程框图Fig.3 Flow diagram of data processing
4 误差改正及数据处理
时间比对过程中,信号从GPS卫星传播到地面接收机受到多个因素的影响[8],主要包括电离层时延、对流层时延和Sagnac效应等[9-11]。本文采用双频消电离层组合的方法对电离层时延进行修正,采用NATO模型对对流层时延进行修正,通过卫星坐标改正公式对Sagnac效应进行修正,对各个误差项建模修正后,再利用Vondrak滤波和3Sigma法则对结果进行降噪处理和异常值剔除。
4.1 电离层修正
对于双频接收机用户,采用L1/L2双频消电离层组合伪距公式来修正电离层时延引起的误差[12],如式(4)所示
(4)
其中,
式中:PR——修正后的双频伪距观测值;PR1,PR2——在LI和L2频段上的伪距观测值;fL1,fL2——L1和L2的频率1 575.42MHz和1 227.6MHz。
整理得到
(5)
4.2 对流层修正
修正对流层时延采用NATO模型,计算方法如式(6)所示
Δttro=f(e)·ΔR(h)
(6)
其中,
(7)
(8)
式中:f(e)——与卫星高度角e相关的表达式;ΔR(h)——观测点天顶方向的总时延;h——接收机天线的海拔高度。
式(8)中,Ns=324.8,ΔN=-7.32e0.005577Ns,Nslog=ln((Ns+ΔN)/105)
4.3 Sagnac效应
通过卫星坐标改正公式消除Sagnac效应带来的影响,如式(9)所示
(9)
式中:(xs,ys,zs)——修正前的卫星坐标;(x′,y′,z′)——修正后的卫星坐标;α=ωτ——信号传播时地球转过的角度;ω——地球自转的角速度;τ——信号在空间中的传播时间。
4.4 数据处理
采用Vondrak滤波方法[13],对两地时间实验室的GPS共视比对结果进行滤波降噪。Vondrak平滑方法的原理如下[14]
设观测资料x(ti)(i=1,2...N),Vondrak平滑的基本准则为
Q=F+λ2S=min
(10)
式(10)中,
(11)
(12)
(13)
式中:x′i——待求的平滑值;pi——测量数据的权重;F——Vondrak平滑方法的拟合度;S——反映了待求平滑曲线总体上的平滑程度,即平滑度。

(14)
5 实验结果及分析
为验证多接收机组合系统的时间比对性能,选取2019年7月15日至24日(MJD:58680~58689)的GPS共视观测数据,开展相关试验研究,并对数据进行分析评估。两个守时实验室接收机的编号及类型见表1。

表1 接收机的编号及类型Tab.1 Receiver number and type实验室实验室编号接收机类型NTSCNTP1POLARX4TRNTP3POLARX4TRPTBPT03ZX-II3TPT07GTR50PT09POLARX4TR
5.1 零基线共钟比对
为测试GNSS接收机性能,对两地连接不同天线的多台接收机,进行零基线共钟(CCD)比对研究,零基线共钟比对结果如图4至图7所示。
计算图4至图7的结果可得,零基线共钟比对结果的标准偏差(STDEV)分别为0.79ns,1.43ns,1.84ns,1.90ns。
5.2 共视结果及分析
共视时间比对时,可视卫星数会影响时间比对的精度。在相同时刻下,NTSC和PTB同时观测到的卫星个数如图8所示。NTSC与PTB之间的单接收机链路和多接收机链路的共视比对结果如图9至图12所示,分别是比对链路PT03-NTP1,PT07-NTP3,PT09-NTP1和PTE1-NTE1的共视时间比对结果,图中点代表原始值,线表示使用Vondrak平滑滤波后的结果。

图4 NTP3-NTP1零基线钟差示意图 图5 PT07-PT03零基线钟差示意图 Fig.4 Zero baseline clock difference of NTP3-NTP1 Fig.5 Zero baseline clock difference of PT07-PT03
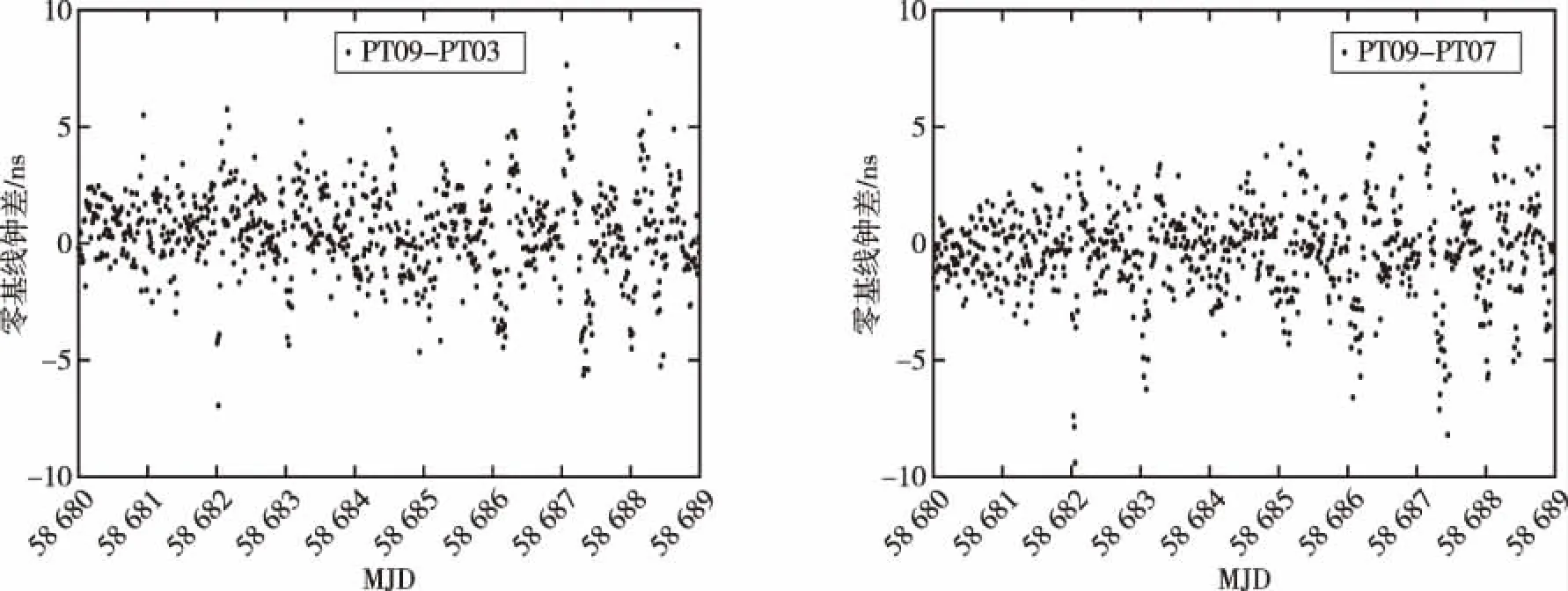
图6 PT09-PT03零基线钟差示意图 图7 PT09-PT07零基线钟差示意图Fig.6 Zero baseline clock difference of PT09-PT03 Fig.7 Zero baseline clock difference of PT09-PT07
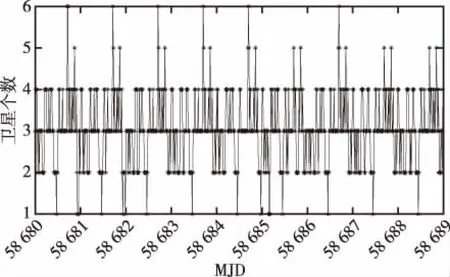
图8 NTSC和PTB同时观测到的卫星个数示意图Fig.8 The number of satellites that can be observed simultaneously
由图8可知,NTSC和PTB在同一时刻同时观测到的卫星个数为1~6颗。
从图9至图12可以看出多接收机链路的稳定度优于单接收机链路。单接收机链路与多接收机链路共视结果的比较如图13所示。
由图13可见多接收机链路结果与两条单接收机链路结果的趋势基本保持一致,但它的波动较小,表现在图中为多接收机链路的结果(红线)处于两条单接收机链路(黑线和蓝线)之间。表2给出了所有链路共视比对结果的STDEV值(增益因子为多接收机链路比对结果相比较于各条单接收机链路比对结果增加的百分比)。
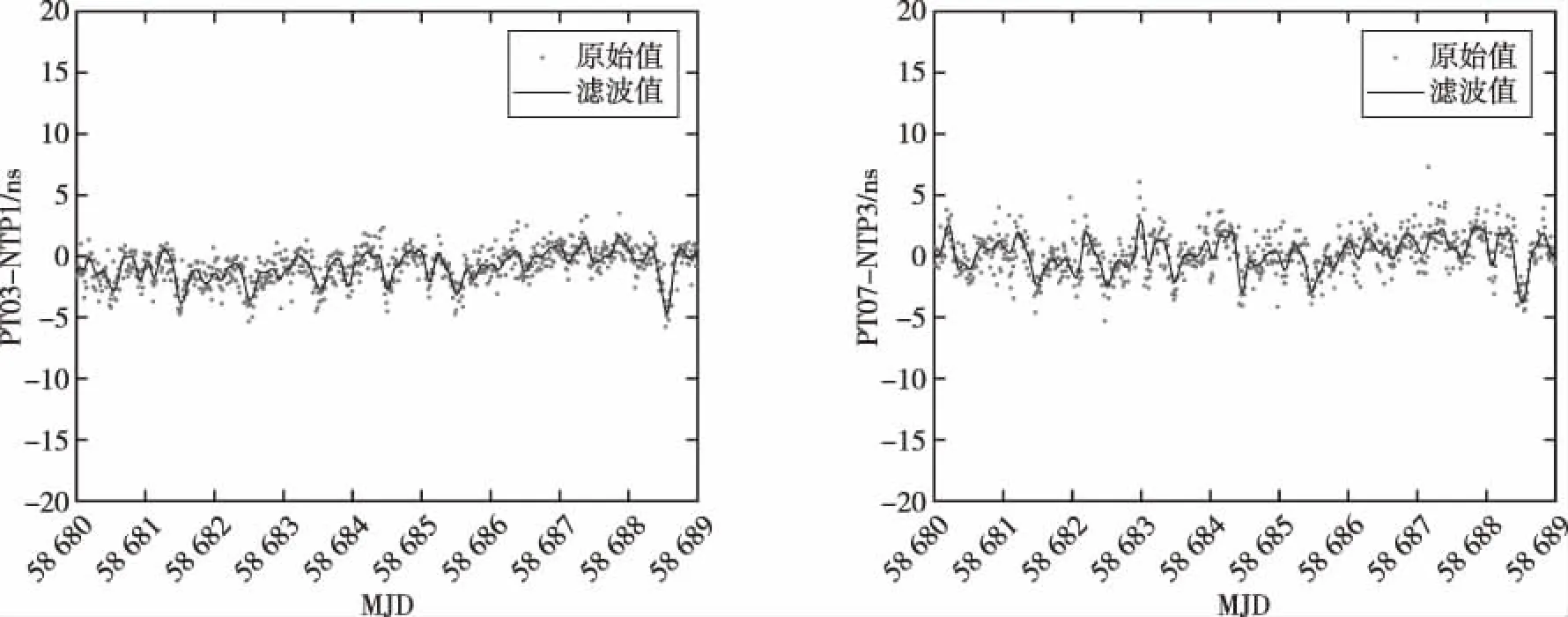
图9 单接收机链路PT03-NTP1的偏差示意图 图10 单接收机链路PT07-NTP3的偏差示意图Fig.9 Deviation of a single receiver link(PT03-NTP1) Fig.10 Deviation of a single receiver link(PT07-NTP3)
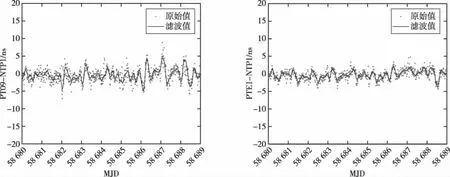
图11 单接收机链路PT09-NTP1的偏差示意图 图12 多接收机链路PTE1-NTE1的偏差示意图Fig.11 Deviation of a single receiver link(PT09-NTP1) Fig.12 Deviation of a single receiver link(PTE1-NTE1)
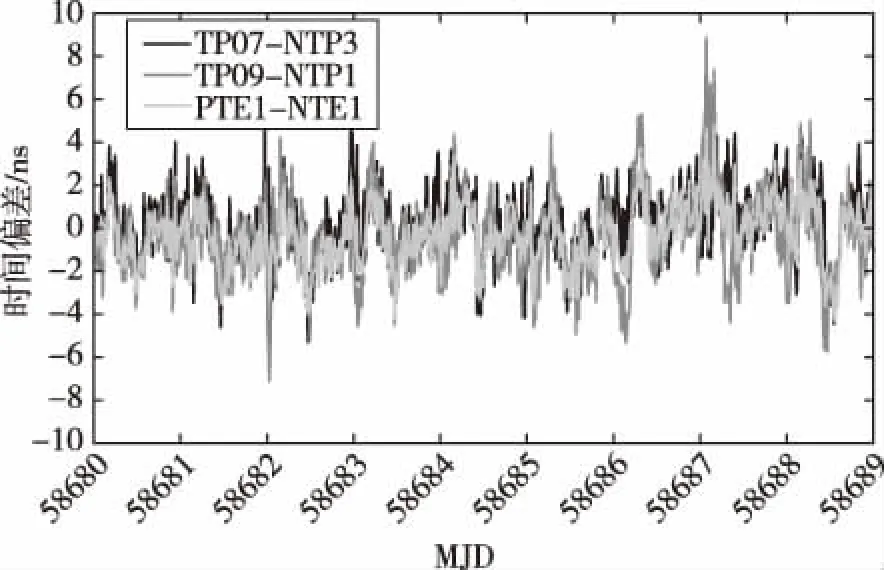
图13 多接收机链路与两个单接收机链路的偏差比较示意图Fig.13 Comparison of the deviation of a multi-receiver link to two single-receiver links
由表2可知多接收机链路PTE1-NTE1的STDEV值为1.36ns,优于各个单接收机链路。图14和图15为多接收机链路和单接收机链路的阿伦方差和时间方差,不同平均时间的阿伦方差,见表3。
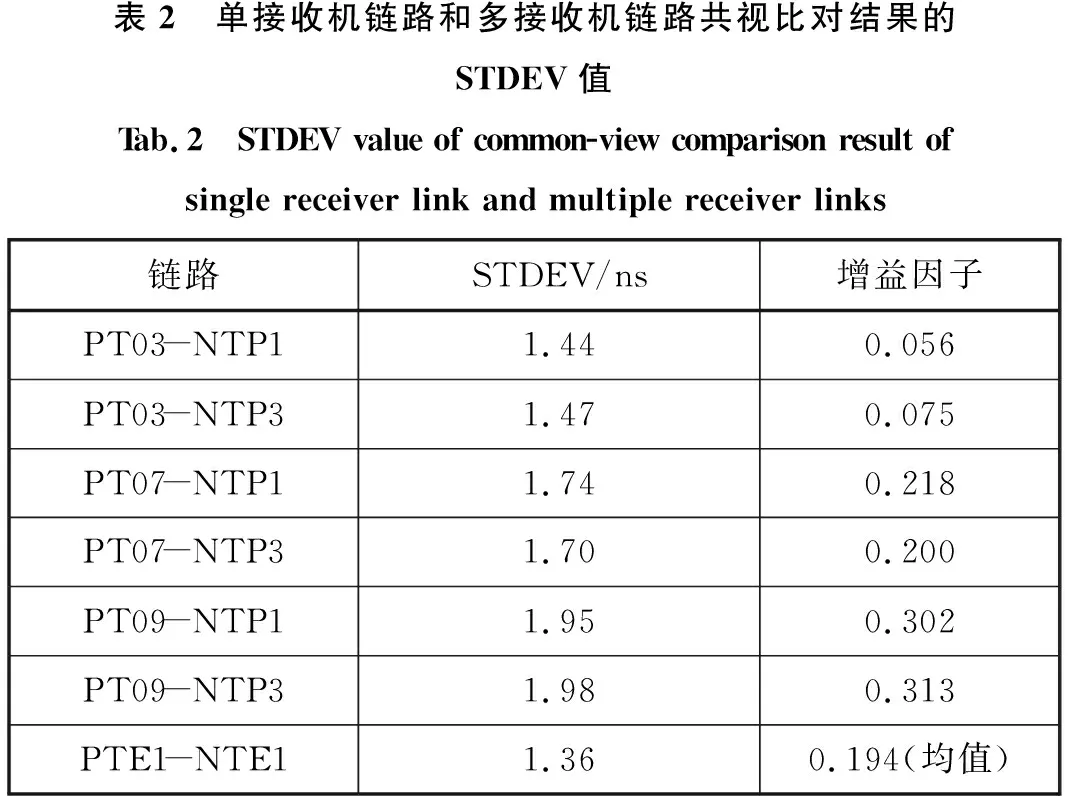
表2 单接收机链路和多接收机链路共视比对结果的STDEV值Tab.2 STDEV value of common-view comparison result ofsingle receiver link and multiple receiver links 链路STDEV/ns增益因子PT03-NTP11.440.056PT03-NTP31.470.075PT07-NTP11.740.218PT07-NTP31.700.200PT09-NTP11.950.302PT09-NTP31.980.313PTE1-NTE11.360.194(均值)
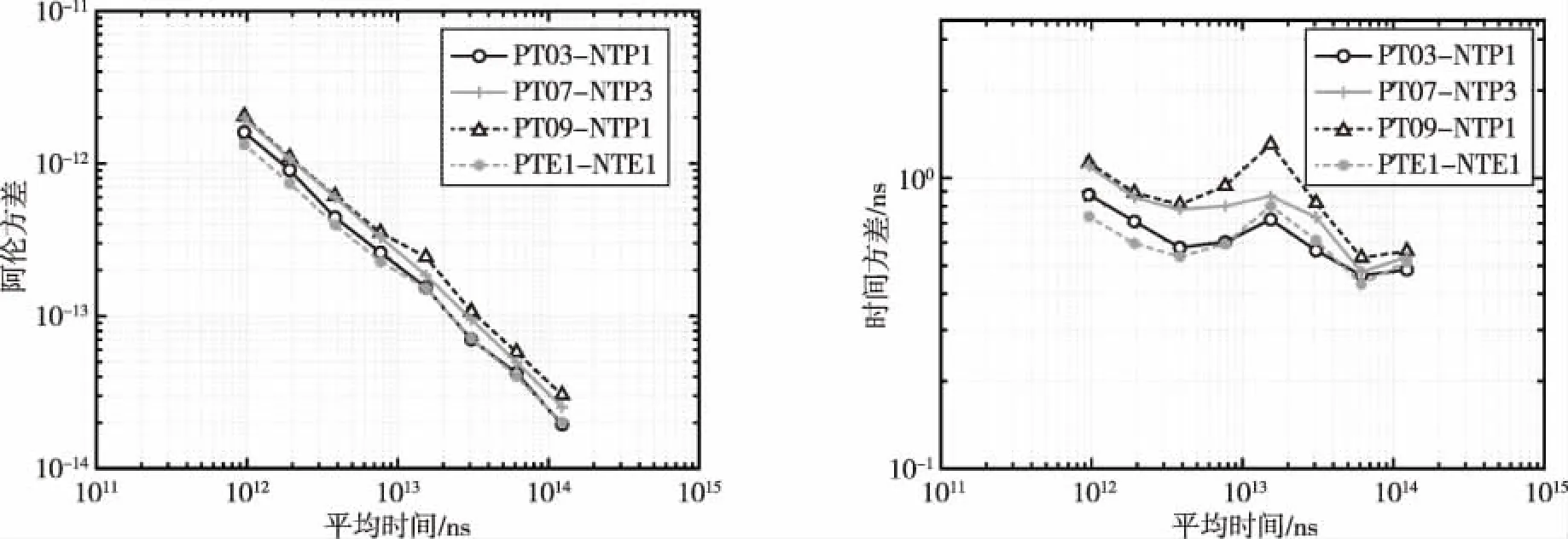
图14 GPS共视的阿伦方差曲线图 图15 GPS共视的时间方差曲线图 Fig.14 Allan variance of GPS common view Fig.15 Time variance of GPS common view
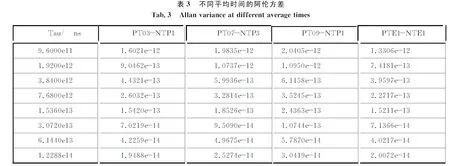
由图14可知,4条链路PTE1-NTE1、PT07-NTP3、PT03-NTP1和PT09-NTP1的频率稳定度分别为3.20×10-14(1d),3.98×10-14(1d),3.31×10-14(1d)和4.40×10-14(1d),天稳都达到了10-14量级,由图15可得,4条链路的时间稳定度均在1ns量级,结合图14和图15可得,多接收机链路的频率和时间稳定度优于各个单接收机链路。由于单接收机链路受到各种因素影响,数据噪声较大,采用接收机组合技术后,观测数据的总延迟平均化,噪声得到一定的抑制,因此,在两端参考源不变的情况下,多接收机链路PTE1-NTE1提高了共视时间比对的性能。
6 结束语
利用NTSC和PTB两个守时实验室各自的多台接收机,介绍了多接收机组合的技术原理,组成多接收机系统,采用数据融合计算得出多接收机系统的观测数据,在NTSC和PTB开展了GPS共视时间比对试验。结果表明,多接收机组合链路的共视比对结果的STDEV值为1.36ns,比单接收机链路比对结果的STDEV值平均提高了19.4%,天稳为3.20×10-14量级,频率和时间稳定度均优于单接收机链路,由此可知,多接收机组合可以有效提升GPS共视时间比对的各项性能指标。
