基于GA的柔性关节空间机械臂神经网络控制
2020-04-27万博威
万博威,陈 力
(福州大学机械工程及自动化学院,福建 福州 350108)
随着航天技术的快速发展,空间机械臂的作用日益凸显,已成为世界各国空间技术研究的重点和热点,而柔性关节空间机械臂系统更是受到各国研究人员的重视[1-7]。He等[8]针对空间机械臂摩擦死区非线性问题,提出基于神经网络的补偿控制策略;王超等[9]提出了包括高斯函数中心参数、宽度参数和权值参数在内的网络全参数自适应学习算法和鲁棒控制策略;谢箭等[10]针对空间机械臂模型不确定部分提出了基于神经网络自适应控制方法;朱战霞等[11]基于工作空间中的机器人模型,考虑不确定性干扰的影响,基于神经网络在线建模技术,提出并设计了自适应神经网络控制算法;洪昭斌等[12]设计了基于混合轨迹的柔性空间机械臂的滑模神经网络控制器。本文结合系统动量守恒和拉格朗日方程建立了系统动力学方程,在此基础上,提出了基于改进遗传算法对神经网络的网络权值进行优化的闭环自适应控制系统。
1 系统动力学奇异摄动模型
图1所示为柔性关节空间机械臂系统模型。
系统的总质心定理:
(1)
各分体的矢径表示为:
ri=rC+Ri0e0+Ri1e1+Ri2e2
(2)


图1 柔性关节空间机械臂
系统的动能T为:
T=Tr+Tθ
(3)

重力作用忽略不计,则系统的总势能U为:
(4)
式中:ki(i=1,2)为柔性关节空间机械臂与安装在关节处驱动电机转子之间的柔性联接经简化后的无惯量线性弹簧的刚度系数;θi为各机械臂驱动电机转子的相对转角;qi为机械臂Bi的关节转角。
本文研究的柔性关节空间机器人系统是考虑载体位置、姿态均不受控且考虑外力作用的情况,因此结合拉格朗日第二类方程获得的系统动力学方程为:
(5)
τθ=Kθ(θ-qθ)
(6)
(7)

本文基于奇异摄动理论,将系统分解为快变子系统控制律τf和慢变子系统控制律τs,由此则有总控制方法
τ=τs+τf
(8)
分别定义与刚度系数矩阵Kθ满足如下关系的正比例因子δ和正定对角参数矩阵K1:
(9)
快变子系统控制方法设计为如下形式:
(10)
式中:Kf=K2/δ,K2为正定对角参数矩阵。
2 系统动力学方程
考虑外界干扰的n关节空间机械臂动力学方程为:
(11)

根据以上设定的名义模型,设计慢变子系统控制律为
(12)
由此,得系统的闭环动态误差为
(13)

3 径向基函数神经网络逼近不确定项

(14)
i=1,2,…,n;j=1,2,…,N
(15)
式中:N为隐含层节点数;cj和bj分别为高斯基函数的中心和宽度;nj为隐含层输出;wij为网络权值。
4 改进遗传算法优化
h=wT
(16)
hm=hm=1,2,…,W
(17)
式中:W为种群规模。
改进遗传算法中的最小目标函数采用前述的跟踪误差的绝对值:
(18)
Jm=J
(19)
式中:si(i=1,2)为机械臂Bi的关节转角qi的跟踪误差。
改进遗传算法在优化时,选择的个体适应度函数fm为:
(20)
本文采用十进制编码,因为十进制编码精度高且收敛速度快,避免受到参数向量维度高、取值范围较大带来的影响。选择操作采用保存最优个体的随机采样法,交叉操作采用均匀交叉算子。
(21)
(22)

变异操作采用高斯变异算子,相应的变异概率是:
(23)
式中:g为当前遗传代数;G为总的遗传代数。
5 控制器的设计
针对式(11)设计如下慢变子系统控制器:

(24)

(25)

考虑Lyapunov函数V:
V=xTPx
(26)
矩阵P,Q正定且满足
PA+ATP=-Q
(27)

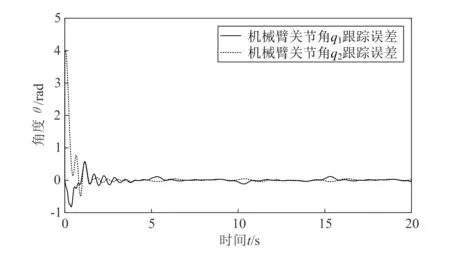
0<ζ (28) 式中:λmax(·)为矩阵的最大特征值。对V求导数,可得 (29) (30) 本文通过对图1所示的空间机械臂进行数值仿真来验证上述方案的有效性。系统中各参数取值如下:m0=40 kg,m1=2 kg,m2=1 kg,J0=34 kg·m2,J1=1 kg·m2,J2=1 kg·m2,a1=1.5 m,a2=1.5 m,l0=1.5 m,l1=3 m,l2=3 m,Jθ1=0.5 kg·m2,Jθ2=0.5 kg·m2,kθ1=500 N·m/rad,kθ2=500 N·m/rad,ΔD=0.2D,ΔH=0.2H。 根据上述参数,得到的仿真结果如图2~图5所示。 图2 机械臂关节转角的运动轨迹 图3 机械臂关节转角速度的运动轨迹对比 图4 各关节角的轨迹误差 图5 各关节角速度的轨迹误差 由图2和图3可知,在空间机械臂存在初始误差的情况下,柔性关节空间机械臂的关节角以及各自的角速度都能在很短的时间内和期望轨迹完全吻合。由图4和图5可知,利用本文的控制方法,柔性关节空间机械臂的关节角及其关节角速度的运动轨迹跟踪误差很快地趋于零,从而说明本文所提出的控制方法能够保证系统实现高精度且稳定的轨迹跟踪。 本文的研究对象是平面结构的空间机械臂模型,其方法也可以推广应用到三维空间的机械臂模型中。除此之外,本文提出的控制方案是以单臂空间机械臂为对象,结合遗传算法和神经网络解决了系统的不确定等问题,类似的联合智能控制方法同样能应用于对多臂空间机械臂的各种控制。总而言之,对空间机械臂的研究尚有大量的问题需要进一步深入探讨,希望本文提出的控制方案对今后的研究有一定的借鉴作用。
6 数值仿真



7 结束语
