基于CAN总线的LED照明智能控制方法
2020-04-26王聚
王 聚
(上海罗曼照明科技股份有限公司,上海 200090)
0 引 言
LED照明是目前市场中主流的照明方式,在LED照明过程中,由于频繁调节照明设备,易产生磨损磨损,导致照明设备的使用寿命缩短,无法充分利用照明光源。为保证LED照明灯光的利用率,避免造成过多的光源损失,针对其进行智能控制是实现此目标的有效途径。在我国针对智能控制照明的相关研究中,主要通过设计控制开关的方式实现照明控制[1]。传统控制方法中存在明显不足有待改进,为解决传统控制方法中存在的问题,CAN总线作为多主方式的串行通信总线,能够提高控制数据在传输过程中的耗时,提高控制效率[2]。因此,针对CAN总线在该控制方法中的应用是具有现实意义的,能够为针对该控制方法的优化设计起到助力作用。
1 CAN总线介绍
CAN总线作为目前国际上应用最为广泛的通信总线,能够通过ISO国际标准化的串行通信协议,实现实时控制的串行通信网络。该总线在提升通信速率方面取得了十分卓越的成就,相比于传统总线能够提升48.6%。其对传输介质的选择约束较少,具有十分广泛的适用性[3]。CAN总线运用非破坏性总线仲裁技术,设计出独特的接口电路,可同时由多个节点共同传输信息,实现了多主方式的串行通信,作为一种新型通信总线,具备极高的性价比。该总线以其具备的实时性、灵活性以及可靠性等特点,在多通信总线中脱颖而出,成为时下最受欢迎的通信总线[4]。
通常情况下,CAN总线的通信范围为0~10 km,使超远距离的数据传输真正意义上成为可能,且每节点的通信速率最高可达1.0 Mb/s。该总线在具备数据传输功能的同时,具备纠错功能,在数据传输过程中,面对突发事件能够在第一时间通过CRC校验的方式,发现出现错误的原因,再采用差分手法,从根本上降低误码率,进而保证数据传输的有效性,保证其通信质量[5]。CAN总线以其独有的检错机制,能够在信息传输发生错误时自动退线,最大限度地确保线路的安全性。
2 LED照明智能控制方法
2.1 发送LED照明智能控制节点信息
为了实现对LED照明的智能化控制,引进CAN总线,利用CAN提供的智能通信协议选择智能控制节点,并根据R线分布向智能控制端发送节点信息[6]。在此过程中,应用在CAN通信协议支撑下的代码自动生成软件,对LRD终端进行节点信息优化配置,通过此种方式不仅可实现对终端编码效率的提升,而且也可在查询LED终端控制信息过程中采用报文的方式对节点信息进行有效传输。
在传输报文信息前,需要读取LED照明端的寄存器状态,通过判断终端节点是否处于信息接收状态,判断前端是否对LED照明信息执行了发送请求。当确保两端均处于通信状态时,检索前端是否对控制信息进行有效发送,或发送信息是否接收成功等[7]。若前端显示信息成功发送,且终端实现对信息的接收,则需要将待发送的数据按照指定的控制排列规则进行排序,使控制信息组合成一种数据帧,然后将数据帧进行封装处理,并将其传输至数据缓存区域。判断封装的信息是否符合CAN总线通信协议,若判定条件符合则直接在操作端点击发送功能键即可[8]。在此过程中,主控制节点在信息初始化控制过程中,可选择 MO 1.0(Message Object 1.0) ~ MO 5.0(Message Object 5.0)作为报文信息配置对象,传输过程报文信息配置对象的功能如表1表示。

表1 基于CAN总线的控制节点报文配置信息
按照表1中信息,对LTU端信息与RTU端信息进行报文信息匹配[9]。在此基础上,结合终端主节点的顺序,对发送LED照明智能控制节点信息的流程进行规划。发送LED照明智能控制节点信息的流程如图1所示。
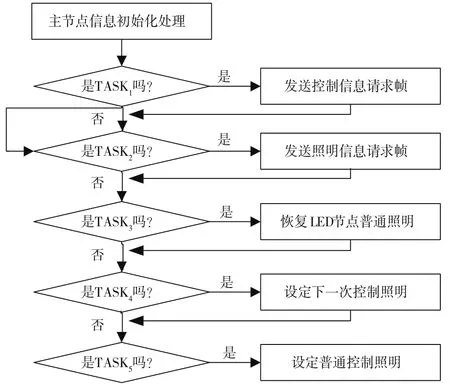
图1 发送LED照明智能控制节点信息的流程
按照图1所示流程,通过对子节点数据信息的实时更新处理,实现MO 1.0(Message Object 1.0)~MO 5.0(Message Object 5.0)子节点信息的实时更新,在确保发送节点数据具备一定时效性的基础上,执行流程,以此完成对基于CAN总线LED照明智能控制节点的信息发送。
2.2 结合报文控制节点设计LED照明智能控制流程
在确保终端可接收到控制节点信息的基础上,应综合报文控制节点,对LED照明智能控制流程进行最终设计。此过程中,通过LED照明中多种元件的通信连接,将CAN总线端的信息整理成报文,发送给微服务器端,当微服务器端接收到控制信息后,对接收到的信息进行协议转换与算法统计,智能定位LED照明设备的控制位置,最终使用总线(USART)驱动LED照明设备,从而达到LED照明智能控制的目的[10]。综合上述分析,对其控制流程进行设计,步骤如下。
第一步连接LED照明装置与多种通信装置,初始化LED照明装置的多个功能模块,第二步完成对LED照明装置的初始化处理后,在控制端输入稳定照明电压,检测装置运行,第三步在自检行为通过后启动LED照明内的自动定时器,用于采样与定位控制行为误差,第四步在前端开始正常工作后接收控制节点报文信息,第五步深度解析报文内容,判断照明灯光与照明亮度现状,第六步解析控制行为,第七步执行对照明的控制,完成对LED照明的智能控制。
3 对比实验
本文上述完成对基于CAN总线的LED照明智能控制方法的理论设计,为验证该方法在实际应用中的效果,开展如下对比实验。
选择建筑施工企业正在施工的建筑设施作为实验环境,该项目目前已完成结构搭建、电气设备以及管线等相应的搭建工作,正在实施灯光照明安装和控制。选择该建筑中两层结构的所有照明设备作为实验对象,其中一层利用本文提出的智能控制方法,另一层利用传统照明控制方法。为确保实验结果具有一定的客观性,应保证两层建筑结构当中所有照明设备的规格和照明方式均相同。表2为两层建筑结构中LED照明设备的型号和规格参数对照表。
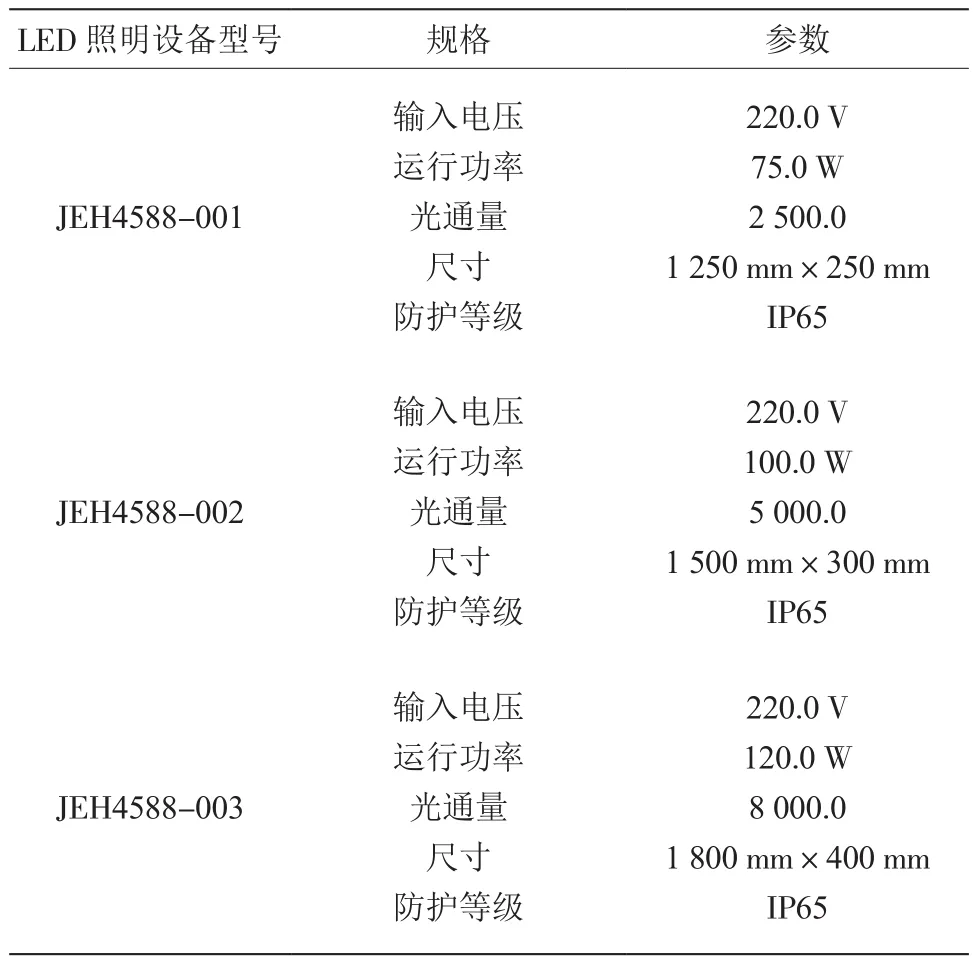
表2 两层建筑结构LED照明设备型号、规格对照表
将表1中3种不同型号的LED照明设备安装在两层建筑结构的对应位置上,分别利用两种控制方法对LED照明设备进行控制,针对每种型号LED照明设备进行分别进行一组100次开关控制的操作,在每一个LED照明设备位置上安排相应的实验人员对路灯亮起次数进行记录,将实验结果绘制成图2的实验结果对比图。
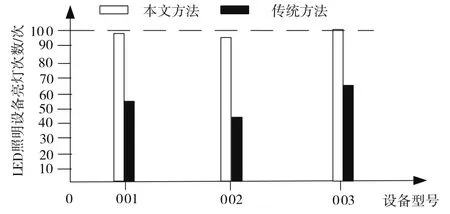
图2 两种照明控制方法实验结果对比图
从图2中的实验结果可以看出,本文控制方法下,3种不同型号的LED照明设备在100次开关控制的过程中能够达到更高的亮灯次数,并且JEH4588-003型号LED照明设备的亮灯次数为100,达到了100%的高精度控制。而传统控制方法下,3种不同型号的LED照明设备在100次开关控制的过程中亮灯次数均小于本文控制方法,并且JEH4588-002型号LED照明设备的亮灯次数未超过总控制次数的50%,与照明控制要求存在较大差异。
上述实验验证了本文方法对LED照明设备开关的控制情况,下面依然使用上述两种方法进行照明亮度的测试,分别控制3种不同型号LED照明设备的照明亮度,以两种方法下达100次亮度调节指令,观察照明设备的亮度控制结果如图3所示。
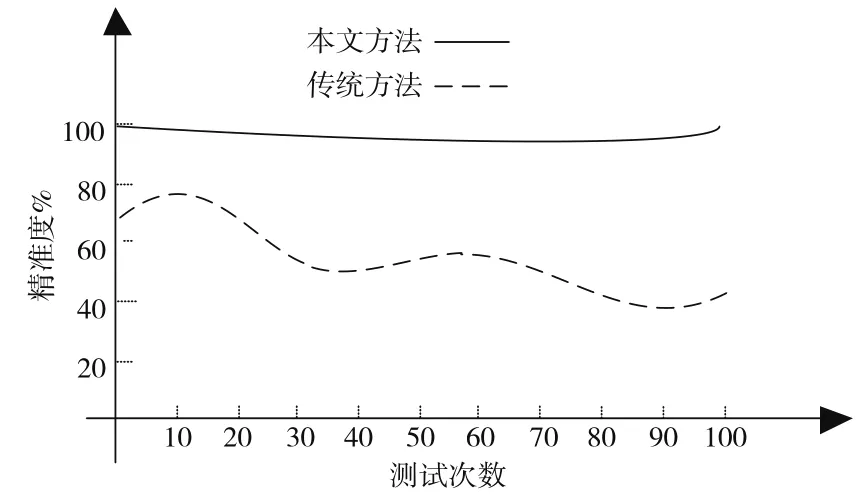
图3 两种照明控制方法照明亮度控制效果对比
由图3可以看出,经过100次的照明亮度调节,传统方法控制精准度较低且不稳定,波动较大,本文方法控制精准度接近100%,且控制较为稳定,由此证明本文方法在LED照明设备亮度控制中的优势,在实际应用中能够有效提高对LED照明设备的控制精度,控制效果满足照明标准。
4 结 论
本文在完成对CAN总线的分析与研究后,从发送LED照明智能控制节点信息、结合报文控制节点设计控制流程,对基于CAN总线的LED照明智能控制方法展开设计,并通过设计对比实验的方式验证本文的设计方法。经过专业的实验检验后,证明了本文设计方法可实现对LED照明设备的高精度控制,在实际应用中的效果更为显著,因此可尝试将本文设定的方法投入市场使用。
