潜器精确悬停控制技术研究
2020-04-17耿丹萍庄永峰
耿丹萍 庄永峰


摘 要:基于深海潜器悬停控制的重要意义,本文首先分析潜器浮沉运动方式及控制需求的独特性,然后梳理潜器浮沉运动控制特性及关键技术,分析运动控制建模的基本方法及途径,最后结合某水下平台的运动控制仿真及测试结果,给出潜器悬停控制发展思路。
关键词:UFP;PID控制;运动控制仿真
中图分类号:U674.941;TP273 文献标识码:A 文章编号:1003-5168(2020)01-0082-05
Abstract: Based on the important significance of the hover control of underwater vehicle, the uniqueness of the floating and sinking motion mode and control requirements of the vehicle was analyzed firstly. The characteristics and key technologies of underwater vehicles floating and sinking motion control were combed, and the basic methods and approaches of motion control modeling were analyzed. Based on the motion control simulation of an underwater vehicle and the lake test results, the suggestion for hover control of underwater vehicle was given。
Keywords: UFP;PID;motion control simulation
1 研究潛器悬停的意义
潜器采取悬停状态待机,可延长水下续航时间,并有效降低自身噪声,提高有效探测范围。在海军潜器建设方面,大部分操纵工况都已经基本实现了自动控制,但潜器水下悬停操控演练仍依赖于人工操作。国内潜器水下悬停控制研究尚不成熟。因此,为了降低水下潜器浮沉运动的能量消耗,提高系统的可操纵性,降低系统成本,对低功耗、高精度、可重复悬停的潜器控制技术开展研究具有极其重要的现实意义。
2 潜器悬停的原理
潜器定深悬停必须满足以下几个条件:①减小并消除垂向力差和力矩差,实现垂向受力平衡;②减小并消除垂向上的运动惯量和垂直面上的转动惯量;③减小并消除潜艇在垂向上与定深的位移偏差[1]。
悬停控制的本质是根据动量守恒,通过控制注排水的量与时机,使其产生的冲量消除垂向的运动惯量。
然而,面对非结构、非预知的复杂海洋环境以及航行器本身动力学模型的非线性与耦合性,开发航行器的悬停控制技术极具挑战性,主要表现在以下几方面。
第一,潜深不同引起水下平台浮力变化。随深度变化的海水密度的计算公式为:
对潜艇悬停运动受海水密度变化的影响进行研究时发现,在近水面,浮力平衡的潜艇下潜到1 000 m水深时,浮力可增加约5‰。
第二,潜深对浮力调节系统性能的影响。随着潜深的变化,海水的密度、压力会随之变化,从而影响泵排量的变化,进而影响基于浮力调节方式的控制性能。此外,大深度液压泵涉及动密封、腐蚀、泄露、低效、生物附着等一系列难题。目前,大深度液压泵几乎完全依赖进口,对其性能不可把控。
第三,响应的大迟滞效应。一方面,水下平台惯性质量特性增大了系统的响应迟滞特性;另一方面,与通常利用压载或动力推进方式实现平台浮沉控制时提供的阶跃力不同,采用重浮力平衡式浮力调节,在起始阶段提供的浮力值是时间的积分也加大了系统的延迟特性。
第四,难于获得精确的水动力参数,从而难以建立精确的运动模型。
第五,洋流扰动的影响。海洋的潮汐、涌浪、海流、地形等变化规律复杂,是时间和空间上的复杂函数,对水下自动航行会造成不同程度的干扰,而且很难被预知和建立精确预报模型[2]。
因此,一方面,应该选择合理的浮力调节系统方案,搭建高可靠性、高精度浮力调节机构;另一方面,选择具有避免依赖精确的数学模型的、具有自适应性和鲁棒性的运动控制算法。
3 浮力调节方案
3.1 浮力调节性能分析
对于采用重浮力平衡式原理的浮力调节装置,主要关注最大浮力调节能力、浮力分配机制、调节精度三个方面。其中,最大可变体积决定了系统最大调节能力;全系统浮力零点分配决定了系统上浮、下沉的能力配比;浮力调节精度决定了定点悬停的成败及效率。浮力微调总调节能力≥10 L;浮力微调速度≥10 L/min;浮力微调精度≥50 mL。
3.2 系统组成
浮力调节及姿态控制系统由快速上浮动力驱动控制的主浮力调节器、微动悬停浮力微调调节器和重心、姿态调节器组成(如图1所示)。其中,微动悬停浮力微调节器为液压活塞形式。
3.3 系统工作原理
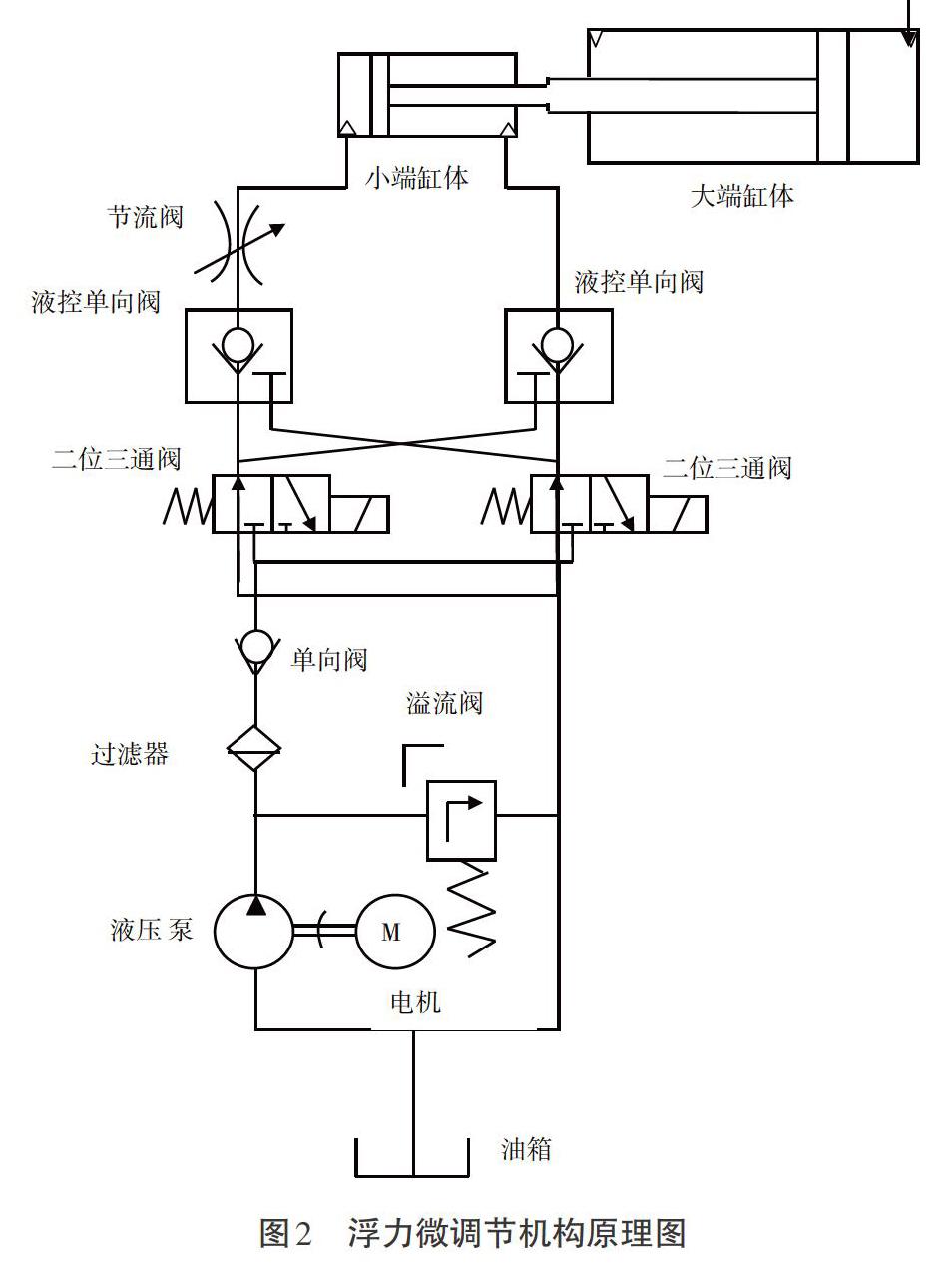
浮力调节系统的基本工作原理是:用一个硬质连杆连接两个相对独立缸体的活塞。其中,大缸体的活塞一端面与外界海水接触,另一端面与舱体形成空气密封舱;小缸体的活塞两端与液压系统的油液相通。通过液压系统驱动小端缸体的活塞杆推动大端缸体活塞运动,通过改变装置的吸排海水量来改变浮力的大小。小缸体内安装位移传感器,通过位移传感器测量缸体内油液的改变量,从而计算浮力改变量。当水下平台上浮时,液压泵将液压油自小缸体活塞左侧向右侧调运,浮力变大,水下平台上浮;相反,当水下平台下潜时,液压泵将液压油自小缸体活塞右侧向左侧调运,浮力变小,水下平台下潜;当水下平台达到稳定状态时,二位三通阀断电,活塞位置不会发生变化,浮力不变,系统处于稳定状态,实现了平台的定深悬浮[3]。基本原理如图2所示。
4 悬停控制仿真
4.1 运动学方程
4.1.1 坐标系的定义。固定坐标[z]轴由水面指向水上。[z]轴正向指向平台上部。
4.1.2 固定坐标系及运动坐标系的关系。由于自由度的定义及水动力系数的计算在机体坐标下进行,某些控制分量计算(如定深控制)及某些静力计算在固定坐标系下进行,因此有必要进行两个坐标系之间的转换计算。定系下的矢量在[o-xyz]上的投影如表1所示。
运动坐标系对于地面有角速度和加速度,所以,其不是一个惯性参考系,动力学牛顿定律并不成立。对水下机器人运动进行分析时,首先采用固定坐标系建立运动方程,通过将同一矢量在两套坐标系中进行分解换算来进行坐标系转换,将各参数转换到动坐标系分解,最终获得相对动坐标系的运动方程[4]。
欧拉角定义:[φ]为滚转角,正向为[ox]轴逆时针;[θ]为纵倾角,正向为[oy]轴正向;[ψ]偏航角,正向为[oz]轴正向。自由度定义如表2所示。
4.2 动力学建模
4.3 水动力模型参数简化
非推进升降运动是水下平台运动的一种特例,具有以下两个特点:①垂直运动速度非常小,可以忽略,因此所有与平台垂直运动相关的水动力项为零,可以大大简化运动方程;②在水下平台稳性良好的情况下,纵向倾侧的稳定性一般通过扶正力矩保证,对于垂向运动与纵倾运动的相互影响,则不需要考虑[5]。
在无垂直航速、纵向倾侧的前提下研究水下平台的垂向升降运动,基本过程与平台抛载上浮运动类似,是一个很强的机动过程,有很强的非线性特性,运动特性与正常机动过程有很大不同。
由于调姿与浮沉采用独立的控制执行机构,因此,基本可以不考虑升沉过程中纵倾运动的影响,从而可将6自由度动力学方程简化为1自由度动力学方程。
4.4 悬停控制算法
PID是靠控制目标与实际行为之间的误差来确定消除此误差的控制策略,不依赖于精确的数学模型,调节参数物理意义明确,易于实现。但是,PID算法仅适用于线性或近似线性系统,对环境不具有自适应性,当遇到扰动时,系统响应特性较差[6]。
对于深海浮沉载荷,工作悬停洋流环境较为平缓,但自身惯性特性较为复杂。综合考虑浮沉载荷运动控制非线性特性、大延迟特性、算法实现难度、调参难度等因素,采用两种改进的PID算法,即变参数PID算法和串级PID算法。变参数PID原理图如图3所示。
为了解决非线性问题,改进PID算法,采用分段线性的变参数PID算法,以解决全局非线性与局部线性的矛盾。通过拟合不同速度/加速度下平台响应曲线,建立控制参数迭代模型,从而实现算法的自适应性[7]。
为了从根本上提高控制系统动态特性,提高系统响应频率,特别是解决水下平台及浮力调节系统自身的迟滞特性,采用串级PID算法,外环为深度通道,内环为浮力通道。串级PID原理图如图4所示。
5 结论
在MATLAB-Simulink工具箱进行了仿真分析。Simulink仿真模型如图5所示,Simulink仿真结果如图6所示。
基于仿真分析,在丹江口水库开展浮沉载荷悬停控制试验,实现了自动定深悬停。
对于大深度反复浮沉运动的浮沉载荷,宜采用重浮力平衡方式,但由此带来的耦合效应,将加剧平台响应的迟滞特性。选择合适的浮力调节方式对实现低功耗、高精度的悬停控制具有重要意义。由于水介质密度较大,惯性质量将对控制效果产生影响。对于浮沉载荷外形设计,应尽可能减小惯性质量及流阻。对于动力学仿真,过多的水动力系数将导致运动控制器的设计变得极其困难,需要依据平台运动特性进行简化。对于控制算法,应避免对精确的数学模型的依赖,此外还需要具有一定的自适应性和鲁棒性。应该通过不断地仿真与试验验证迭代,优化算法结构和控制参数。
参考文献:
[1]李建朋.水下机器人浮力调节系统及其深度控制技术研究[D].哈尔滨:哈尔滨工程大学,2010.
[2]高剑.无人水下航行器自适应非线性控制技术[M].西安:西北工业大学出版社,2016.
[3]李岳明,庞永杰,万磊.水下机器人自适应S面控制[J].上海交通大学学报,2012(2):195-200.
[4]李岳明,万磊,孙玉山,等.考虑剩余浮力影响的欠驱动水下機器人深度控制[J].控制与决策,2013(11):144-147,153.
[5]高为炳.变结构控制理论基础[M].北京:科学技术出版社,1990.
[6]王丽荣.水下机器人变结构控制技术的研究[D].哈尔滨:哈尔滨工程大学,2003.
[7]孙元泉,马运义,邓志纯.潜艇和深潜器的现代操纵理论与应用[M].北京:国防工业出版社,2001.
