基于GPS/BDS的大坝安全监测试验与分析
2020-04-15葛山运
葛 山 运
(重庆工程职业技术学院测绘地理信息学院,重庆 402260)
0 引 言
截至2018年底,我国已建各类水库98 460 座,水库总库容达到8 764 亿m3,大坝作为水库的挡水建筑物,不仅能够调控水资源时空分布,而且对水资源的优化配置和防洪减灾起到很大作用[1]。据2018年水利部统计,我国大中型水库大坝安全达标率为95.2%,尽管总体情况较好,但仍有部分水库大坝由于受洪水、地震、滑坡等自然因素以及勘测设计缺陷、施工质量漏洞、运营管理不到位等人为因素影响而存在安全隐患或安全事故[2]。水库大坝安全运营不仅关乎水库工程综合效能的发挥,而且涉及坝区下游人民的生命财产安全,一旦发生溃坝事故,将造成不可估计的损失。
大坝安全监测,是指通过专业仪器设备和人工巡视对大坝自身及其周围环境量进行测量和观察的工作[3],常用的仪器设备包括全站仪、测缝计、沉降仪、测斜仪、温度计、压力计及各类接收仪表等。以往水电站大坝外观安全监测主要采用前方交会法、视准线法、引张线法和水准测量法等传统技术方法[4],这些测量方法监测频率通常每月一次,具有步骤繁琐、自动化程度低、耗时费力,易受人为因素干扰、内业数据繁冗,处理复杂易出错等缺点,无法满足快速、动态监测大坝变形的要求。
近年来,随着全球卫星导航系统(Global Navigation Satellite System,GNSS)的发展,GNSS技术凭借其高精度、全天候、实时动态等特性在获取物体动态位置、监测物体动态变化等方面具有很好的应用效果,被广泛用于大坝安全监测[5,6],对确定大坝健康状态和保证大坝安全运营具有重大意义。以往研究只是采用GPS单系统对大坝进行周期性静态观测[7,8]或基于GPS-RTK模式对大坝进行实时监测,而BDS的卫星性能和测距精度又与GPS基本相同[9],但对BDS在大坝安全监测中的应用研究甚少,且大坝具有四周多山的特点,利用单一GNSS系统往往会因为周围山体遮挡而无法保证其监测精度。此外,RTK模式由于其受限于平面1~2cm以及高程3~5cm的测量精度,致使对常规运营期大坝短期小幅度mm级变形监测无从为力。本文基于以上问题,以琅琊山抽水蓄能电站大坝作为研究对象,充分利用BDS资源,开展基于GPS/BDS的大坝安全监测可行性研究,尝试采用GPS/BDS观测数据的连续准静态模式对大坝进行安全监测,并对其监测结果进行深度分析,得出了一些有益的结论。
1 监测点布设与监测基准
1.1 琅琊山抽水蓄能电站大坝概况
安徽琅琊山抽水蓄能电站位于长江支流青弋江上,是一座以防洪、发电、供水为主,兼有航运等综合效益的水电站,建设耗资巨大,历经复杂地质条件、变压器设计与安装等重重困难成功运营,机组总容量高达60 万kW,年发电量约8.6 亿kWh,上库主坝采用钢筋混凝土面板堆石坝,坝顶高程174 m,坝顶长度655.5 m,最大坝高64 m。副坝采用混凝土重力坝,坝顶高程173 m,坝顶长度327 m,最大坝高19.4 m。
1.2 监测点布设
如图1所示为琅琊山水电站监测点布设示意图,图中LY05和LY06为监测基准点(基准点连线与大坝的坝轴线平行),S01和S02为上游监测点,S03和S04为下游监测点,JH01和JH02为校核基点。本文基于双基准站策略进行试验,分别将大坝稳定的基岩点LY05、LY06作为主基准站和辅助基准站,S01、S02、S03、S04作为监测站,为便于后期坐标转换,在JH01、JH02同样安置GNSS接收机,接收机类型为Lecia 1200测地型双频GNSS接收机,数据采样频率设置为1 s,卫星截止高度角设置为15°。
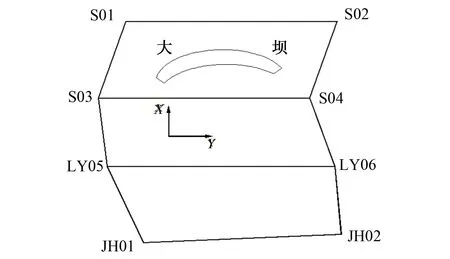
图1 监测点布设示意图
1.3 监测基准
将基准站LY05、LY06以及JH01、JH02与琅琊山水电站附近的BJFS、XIAN、WUHN、SHAO、SUWN共5个IGS参考站进行联测,获取上述站点在ITRF2014框架、2019.1644(2019-03-01)历元下的坐标,联测的IGS参考站与基准站的相对位置如图2所示。
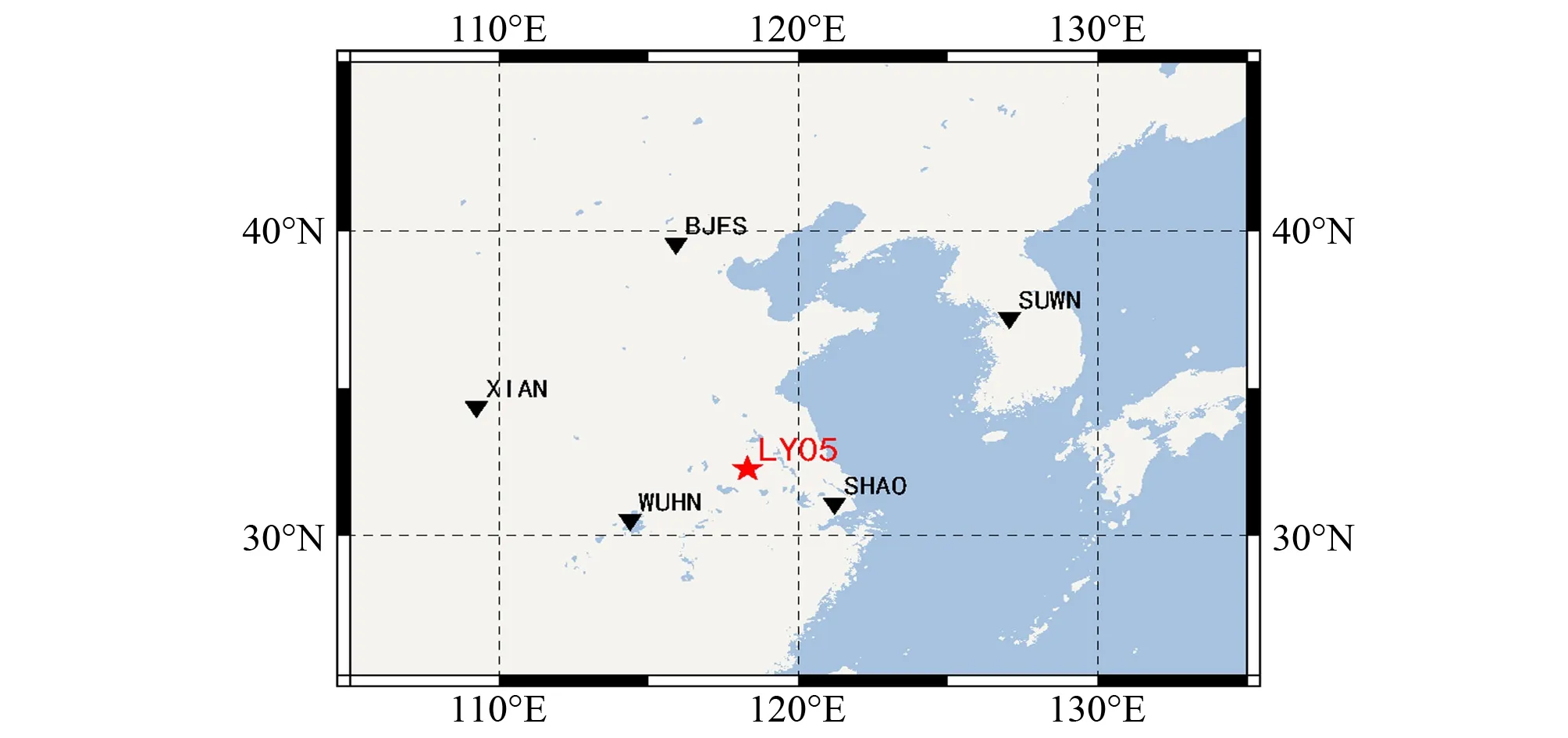
图2 监测基准与联测的IGS参考站分布图
2 监测数据处理与坐标转换
2.1 监测数据处理
采用GAMIT10.7软件对大坝GNSS监测网进行基线解算,基线解算时需在sestbl.、sittbl.、sites.defaults、process.defaults控制文件中设置解算策略[10]。以基准站LY05和LY06作为解算的起始点,通过sittbl.控制文件对基准站的X、Y、Z坐标分别设置3、3、5 cm的约束量,且对监测点的X、Y、Z坐标也分别加入5、5、5 m的约束量;通过process.defaults控制文件将监测点的历元间隔与基准站的历元间隔统一为10 s;在sestbl.控制文件中将卫星截止高度角设置为15°,基线解算模型设置为RELAX松弛解(即同时解算基线和轨道),基线解算类型设置为“2-iter”(即对测站坐标进行2次迭代),基线观测值类型设置为适合于中长基线的LC_HELP(即使用电离层约束求解宽巷模糊度的LC解,进而抵抗电离层折射误差),干湿延迟模型均采用Saastamoinen模型,干湿映射函数均采用目前精度较高的维也纳映射函数1(VMF1)。此外,使用参数间隔在4~7 h范围内的PWL分段线性法[11]对测站天顶方向的对流层湿延迟参数进行估算,估算结果可以减弱对流层折射误差对地铁控制网基线解算的影响;基线解算时将gpt.grid文件代入一起解算,该文件是全球气压和温度模型文件,GAMIT软件可以采用内插的方法从该模型文件中计算测区的气压和温度。
基准站距离所有监测点不超过5 km,因此上述基线解决方案理论上可以满足大坝安全监测mm级的精度要求,基线解算时每个监测点都按GPS单系统、BDS单系统和GPS/BDS组合系统共3种方案进行数据解算,最后根据联测的基准站坐标,结合基线解算结果计算各监测点在ITRF2014框架下的三维空间直角坐标。
2.2 坐标转换
监测点坐标解算结果位于ITRF2014参考框架,大坝安全监测分为水平位移监测和垂直位移监测,为更好的观察水电站在抽水和蓄水过程中产生的几何变形,因此分别以坝体纵向、坝轴线方向作为X轴和Y轴建立琅琊山水电站坝轴独立坐标系,而对于监测点在竖方向的变化本文则直接采用WGS-84椭球大地高。
基于CGCS2000椭球参数[12],将各监测点在ITRF2014框架下的三维空间直角坐标(X,Y,Z)转换为CGCS2000椭球下的大地坐标(B,L,H):
(1)
式中:N为卯酉圈曲率半径;e为椭球第一偏心率。
以CGCS2000椭球为基准,选择测区平均高程作为高程投影面,利用测区中央子午线将各点坐标投影至国家标准3°带,选用LY05、LY06基准点作为坐标转换的公共点,通过四参数坐标转换模型计算国家标准3°带高斯直角坐标系与琅琊山水电站平面控制网采用的LYHPS坐标系之间的转换参数,事后采用JH01、JH02作为检核点,检核点转换残差均为mm级。四参数坐标转换模型为[13]:
(2)
式中:m为尺度比缩放参数;α为旋转参数;x0、y0为平移参数。
基于平面坐标转换参数将监测点的高斯直角坐标转换为LYHPS平面坐标,而LYHPS平面坐标系与琅琊山水电站坝轴独立坐标系只存在一定的旋转关系,不存在平移和尺度比关系,因此可通过下式将监测点的LYHPS坐标转换为坝轴坐标:
(3)
式中:β为LYHPS坐标系与琅琊山水电站坝轴独立坐标系之间的旋转角,可以通过基准点LY05、LY06在LYHPS坐标系下的坐标反算其坐标方位角而得。
3 大坝安全监测结果与分析
3.1 卫星连续可用性与PDOP值分析
图3为2019年3月1日S01监测点GPS、BDS、GPS/BDS共3种模式下的可见卫星数量,图4为3种模式下的PDOP值。分析图3和图4可知,与BDS单系统和GPS单系统相比,GPS/BDS组合系统增加了卫星数量、降低了PDOP值,有效提高了观测精度。同时,大坝上空BDS含有与GPS相当的9颗可见卫星,但BDS的PDOP值却大于GPS,究其原因是现阶段北斗系统的GEO/IGSO、GEO和IGSO主要覆盖亚太地区,其监测站的开放度分布相对不及GPS。由图4可知BDS单系统的PDOP值存在较大抖动,主要原因是相应时间内的所有IGSO都位于观测站点的南部。
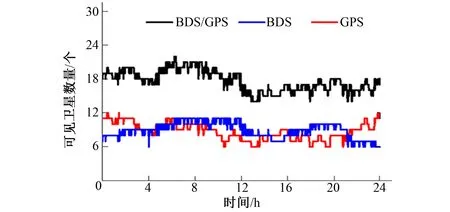
图3 S01监测点单系统与组合系统可见卫星数量
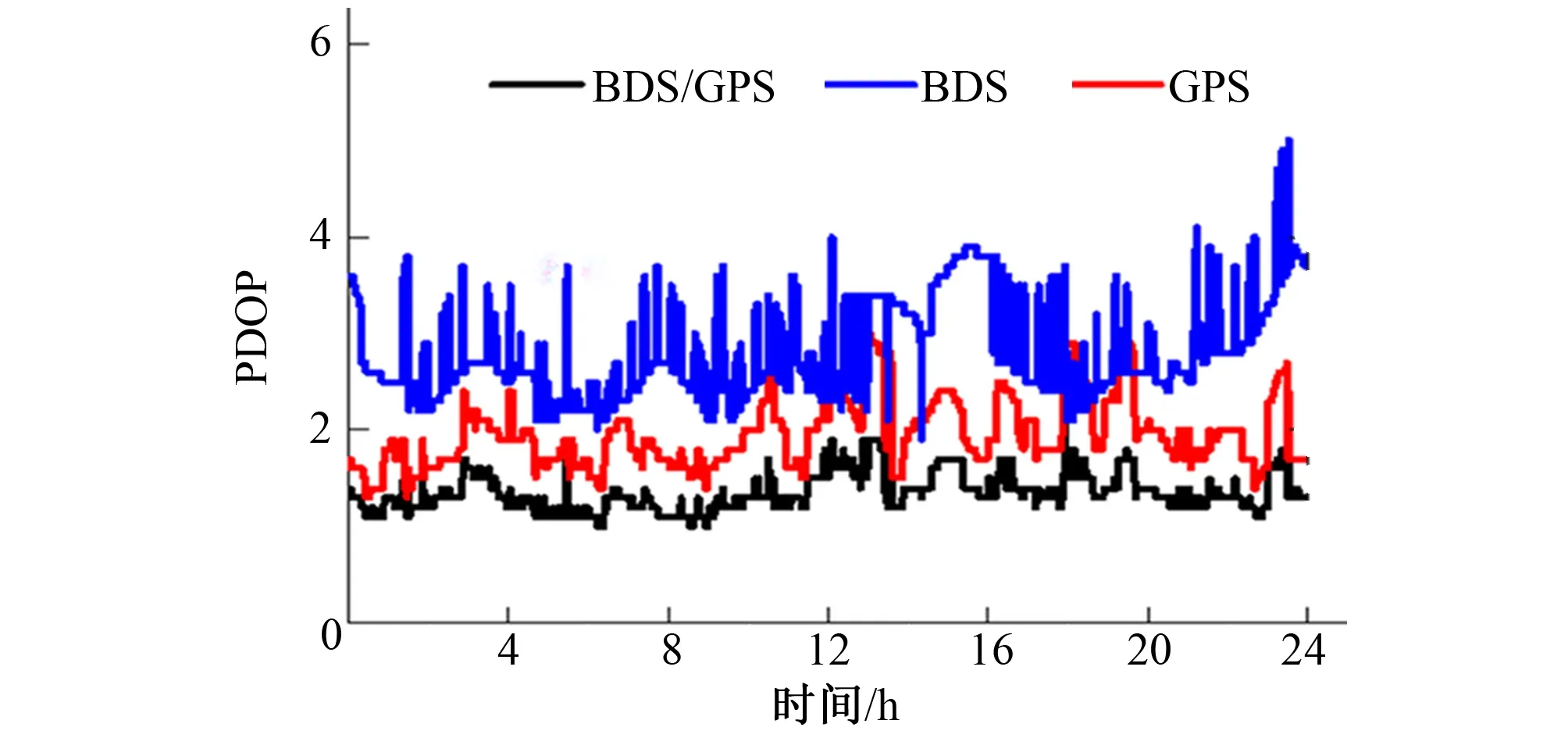
图4 单系统与组合系统PDOP值
3.2 单日有效解时段数分析
图5给出了2019年3月1日所有监测点GPS、BDS、GPS/BDS共3种方案一天内的有效解时段数。分析图5可知,GPS/BDS组合系统的有效解时段数与GPS单系统的有效解时段数相当,除S02监测点外,其余监测点的GPS/BDS有效解时段数量均超过93%,而BDS单系统有效解时段数最大仅为S01监测点的79%,最小为S02监测点的24%,究其原因是S02监测点的天线一侧被山体遮挡,因此接收卫星信号时受到了严重影响,但此时采用GPS/BDS组合定位对大坝进行安全监测的优势是显而易见的。对于其他卫星信号接收良好的监测点,GPS/BDS组合系统和GPS单系统的有效解时段数大致相同。
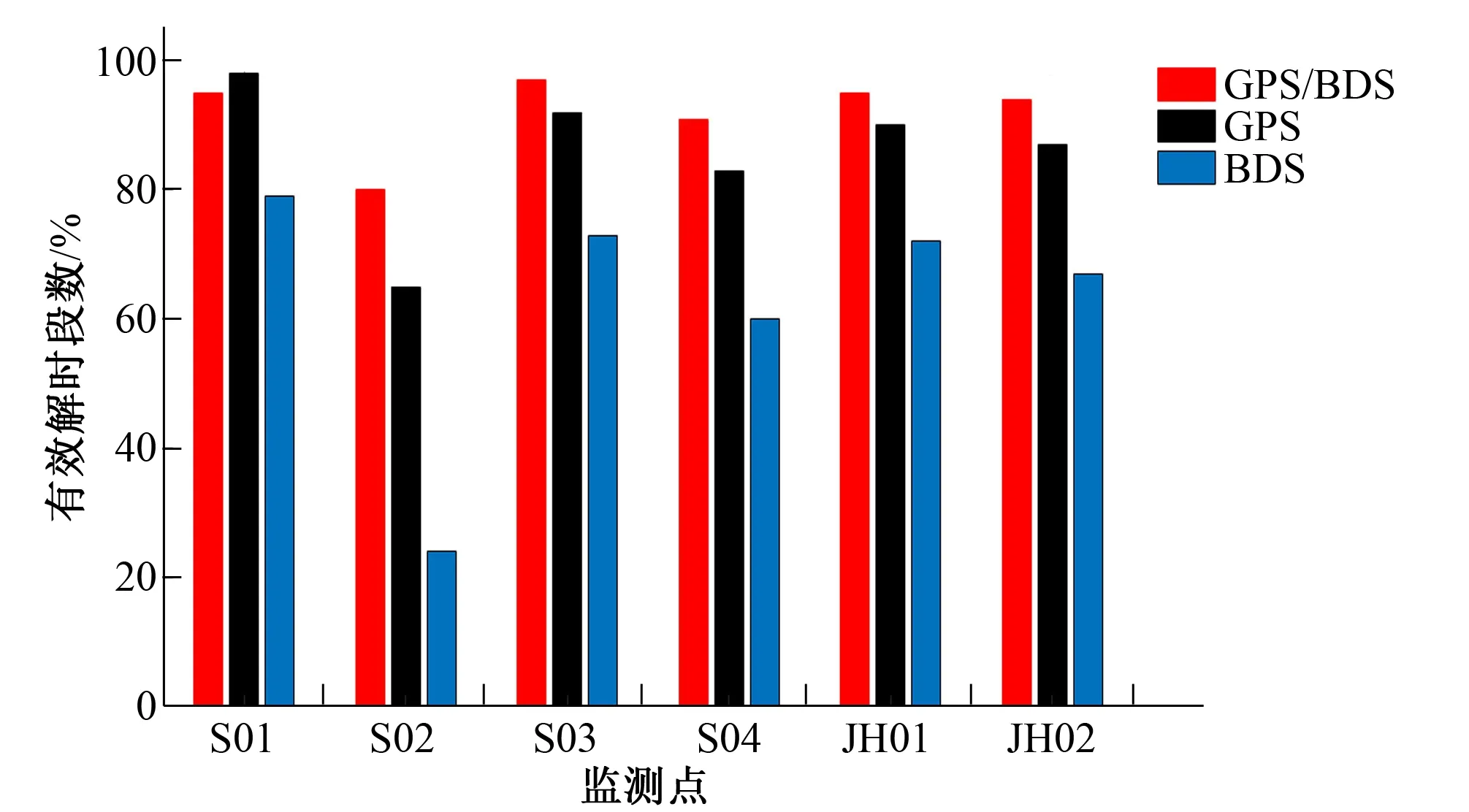
图5 监测点GPS、BDS、GPS/BDS单日有效解时段数量对比
3.3 安全监测坐标序列分析
为了分析GPS/BDS组合定位在大坝安全监测中的应用效果,计算所有监测点在GPS/BDS组合定位连续准静态模式下的坐标序列,限于篇幅,本文以S01监测点在第60年积日的监测数据作为研究对象,以1 s采样间隔通过上文所述方法解算该点第1 h内监测的3600组位于坝轴坐标系下的坐标序列,只保留监测点坐标mm位的X、Y、H坐标序列结果如图6所示。分析图6可知,与Y、H方向相比,监测点X方向在初始阶段的波动幅度小,但经过30 min的初始测量后,监测点在X、Y、H三个方向均只存在mm级波动,坐标序列趋于稳定。
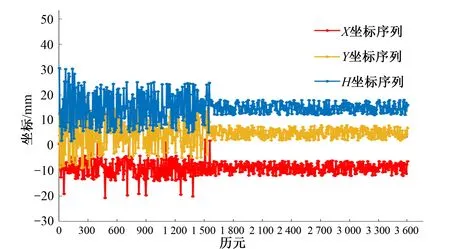
图6 监测点第1 h内的监测坐标序列
对S01监测点第60年积日24 h观测数据进行粗差剔除[14]与卡尔曼滤波[15],如图7所示为取单个小时数据均值作为1 h监测结果的坐标序列。分析图7可知,监测点在X、Y、H方向的1 h坐标序列均在mm级范围内波动,其中X方向最小值为-11.5 mm、最大值为-3.4 mm,最大互差优于8.1 mm;Y方向最小值为-7.9 mm、最大值为5.3 mm,最大互差优于13.2 mm;H方向最小值为-7.4 mm、最大值为4.7 mm,最大互差优于12.1 mm。
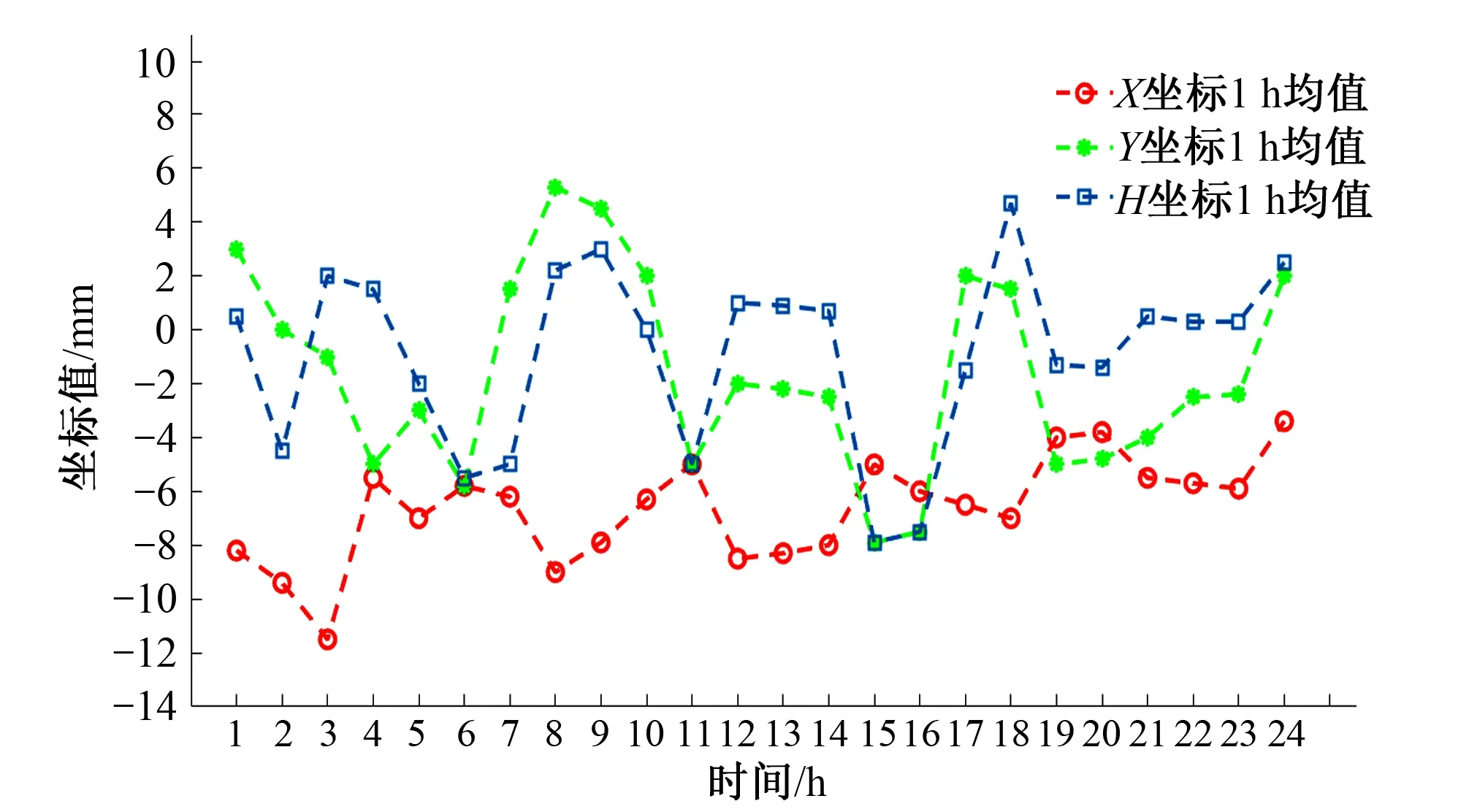
图7 S01监测点1 h均值坐标序列
为了探究基于GPS/BDS组合定位的大坝安全监测稳定性与时间的关系,计算S01监测点第60年积日从第1 h到第24 h的均值,结果如图8所示。分析图8可知,基于GPS/BDS组合定位获得的大坝安全监测坐标在初始时间内会存在一定的波动现象,但在达到2 h的稳定监测时长后便可获得2 mm左右的点位精度,且组合定位精度随着观测时间的增长也在不断提高,X方向监测结果在从第1 h取至第4 h时的均值可以稳定在1 mm,而Y方向和H方向则需从第1 h取至第10 h时的均值方可稳定在1 mm。
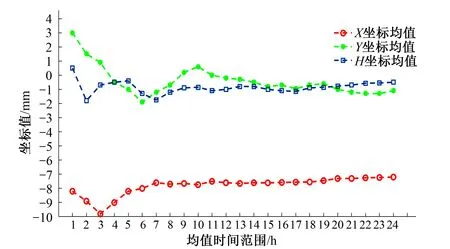
图8 S01监测点由1至24 h内的均值坐标序列
3.4 GPS/BDS监测灵敏度分析
为了研究GPS/BDS组合定位在大坝安全监测中的灵敏度,设计了如图9所示的带有游标卡尺的可移动基座架,该基座架相当于一个可移动的观测墩,通过将基座向某一方向滑动特定的距离实现监测点的变化。
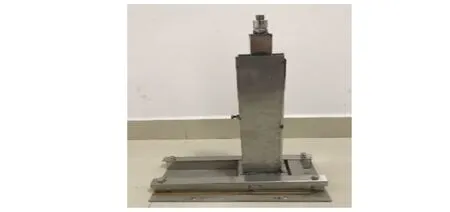
图9 可移动基座架
将可移动基座架安置在S01监测点附近的岩体处,共进行6次特定距离的基座架滑动实验,滑动基座架时通过游标卡尺记录其滑动距离,分别为1.00、6.70、9.40、21.95、37.50和57.10 mm,滑动时以1 s采样间隔连续不断的接收24 h数据,观测结束后对单天24 h监测数据进行滤波处理,取其均值作为滑动特定距离后的(X,Y,H)坐标值,然后计算初始未滑动基座架时的监测点坐标与滑动基座架特定距离后的监测点坐标的差值,进而获得距离变化量,其结果统计如表1所示。
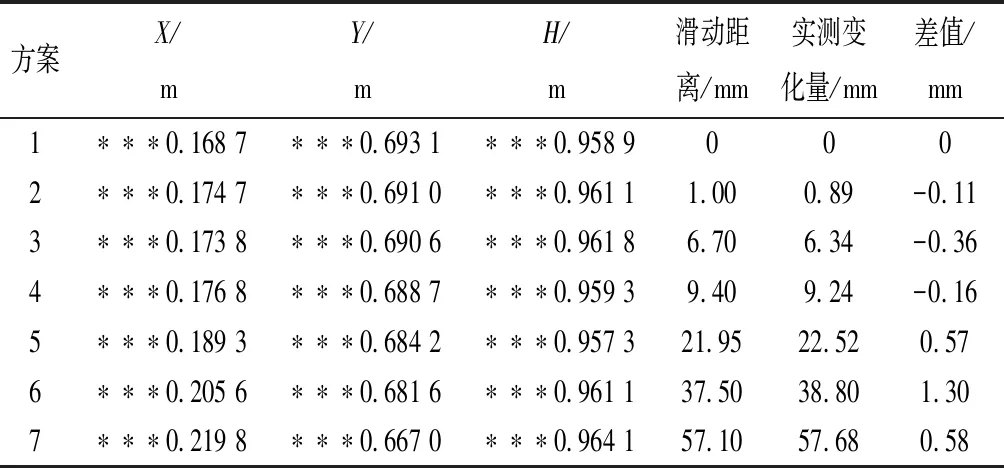
表1 灵敏度测量统计结果
注:***代表监测点坐标的前3位数字,且前3位数字保持一致。
表1中的滑动距离是指用游标卡尺测量的可移动基座架滑动距离,实测变化量是指将可移动基座架滑动后测量的三维坐标值与初始坐标作差而得到的距离变化量。分析表1可知,除第6次试验外,其余试验的实测变化量与设计值的差值优于1 mm,表明GPS/BDS组合定位在大坝安全监测中具有很好的灵敏度,而对于第6次试验的差值1.30 mm,究其原因是当天测量环境风雨交加,在一定程度上对支架的稳定性产生了影响。
为了探究基于GPS/BDS组合定位的大坝安全监测灵敏度与时间的关系,以1 h作为间隔计算24 h内的实测距离与滑动距离,结果如图10所示。
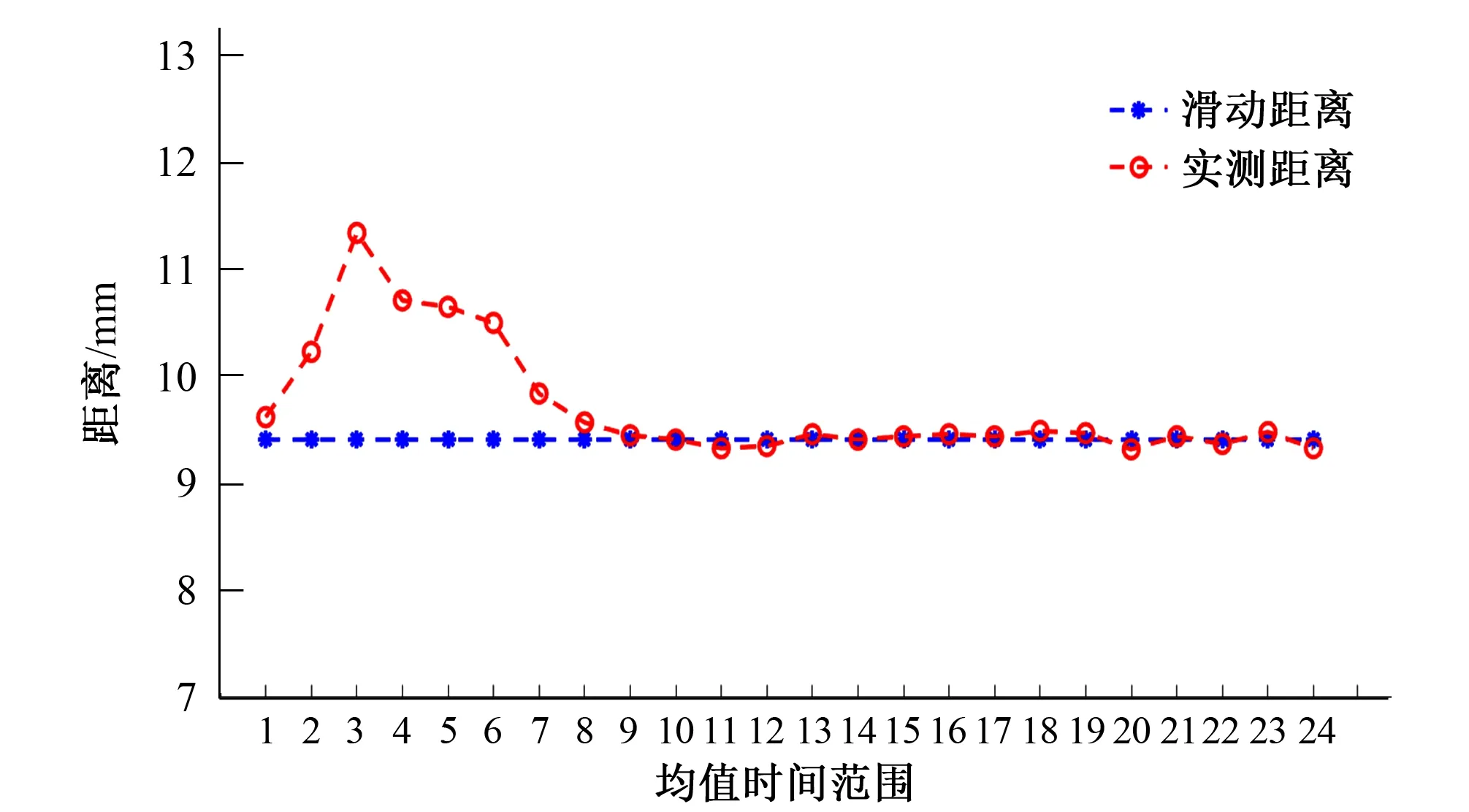
图10 灵敏度测量统计结果
分析图10可知,前7 h的监测结果数据有所波动,但与实际滑动距离相比监测结果仍可保持mm级精度,而第7 h后的实测距离和设计滑动距离基本吻合,差异优于1 mm。
4 结 论
本文以琅琊山水电站实测动态监测数据作为研究对象,验证了基于GPS/BDS组合定位的连续准静态模式在大坝安全监测中的可行性和可靠性,主要研究结果如下:
(1)基于GPS/BDS组合定位的大坝安全监测结合了GPS和BDS系统丰富的数据资源,改善了大坝天顶卫星空间分布的几何结构。
(2)当大坝处于复杂环境条件下,特别是当卫星信号受到严重影响时,基于GPS/BDS组合定位进行大坝安全监测与单系统相比具有明显的优势,能实现快速、准确获取高精度大坝监测点三维空间位置信息。
(3)基于GPS/BDS组合定位获取的大坝监测点坐标序列存在规律性的波动,通过一段时间的初始测量可获得mm级的稳定监测数据。此外,通过对监测坐标序列进行均值处理,X方向在4 h后可收敛至1 mm,Y方向和H方向在10 h后可收敛至1 mm。
(4)通过设计的可移动基座架探究了GPS/BDS组合定位在大坝安全监测中的灵敏度,试验结果表明基于GPS/BDS组合定位的大坝安全监测灵敏度可达到mm级,当在连续准静态模式下观测7小时后其灵敏度优于1 mm,因此基于GPS/BDS系统的大坝安全监测应以7 h作为控制。
以上研究成果验证了GPS/BDS组合定位在连续准静态模式下通过一段初始测量后可以实时获取稳定的大坝监测数据,满足大坝变形mm级的监测要求,且能如实反映大坝监测点的变形情况,具有很强的推广应用价值。
□