基于舰船电场的目标跟踪方法研究
2020-04-15张伽伟喻鹏姜润翔孙宝全
张伽伟,喻鹏,姜润翔,孙宝全
(1.海军工程大学 兵器工程学院,湖北 武汉 430033;2.海军工程大学 电气工程学院,湖北 武汉 430033;3.92941部队44分队,辽宁 葫芦岛 125000)
0 引言
水下电场作为舰船目标的重要物理场,不仅具有明显的传播规律和分布特征,可实现对舰船目标的探测,还包含大量的舰船信息,可实现对舰船目标的定位和跟踪[1]。舰船电场可等效为若干点电荷组成,即点电荷阵列模型[2-3]。舰船电场跟踪则是利用接收到的舰船电场信号,基于点电荷模型实时反演出目标状态的过程,准确估计出舰船的位置、速度及源强度等,对于水中兵器目标定位、水下探测阵列目标跟踪等应用具有重要意义。舰船电场跟踪问题目前研究相对较少,而磁偶极子的跟踪研究相对较多[4],参考磁偶极子的跟踪方法,舰船电场跟踪可采用的方法主要有解析反演、离线寻优和滤波估值三类。解析反演方法受噪声影响较大,不适用于连续状态解算[5];离线寻优方法不能对变向机动的目标进行实时跟踪;滤波估值方法是基于观测模型的在线递推方法,能够在一定背景噪声中对目标状态进行实时估计,也是在跟踪定位领域应用最为广泛的方法。
目前滤波估计方法主要包括粒子滤波[6-7]和卡尔曼滤波两大类,粒子滤波所需样本数量大,计算代价过高,在实际跟踪中实时性较难保证;卡尔曼滤波形式相对简单,且具有很高的实时性,易于编程实现,因此更适用于舰船电场跟踪。卡尔曼滤波的方法有很多,一部分侧重于解决滤波过程中的非线性问题[8-11],一部分侧重于解决滤波初值问题[12-15],各类方法均有各自特点及优劣,而对于舰船电场目标跟踪实际应用所需的滤波估值算法,必须注重综合考虑舰船电场模型与滤波算法的匹配性、初始条件鲁棒性、计算复杂度和稳定性等问题。其中,舰船电场跟踪中模型准确度与跟踪模型的低维度是相矛盾的,一方面舰船电场的点电荷阵列模型,若阵元个数越多则建模精度高,另一方面随阵元个数的增多又会增加跟踪模型的维度,易导致卡尔曼滤波发散。
针对舰船电场卡尔曼滤波跟踪中的问题,本文首先建立舰船电场点电荷阵列模型,并结合舰船电场反演算法,对点电荷个数、观测点水深对建模精度的影响进行分析,明确观测点位置对点电荷个数的需求,以此作为合理控制舰船电场跟踪中滤波器维度的依据,并结合渐进更新扩展卡尔曼滤波器(PUEKF)进行舰船电场跟踪仿真分析和试验验证。结果表明,在舰船电场跟踪中以少量点电荷舰船电场模型等效复杂点电荷阵列舰船电场模是可行的;PUEKF对舰船少量电场点电荷模型具有初值鲁棒性、执行效率高等优势,具有较高的应用价值。
1 舰船电场点电荷阵列模型建模精度分析
1.1 舰船电场点电荷阵列模型建模
根据文献[3]中的舰船电场建模理论,舰船电位和电场的点电荷阵列模型可分别表示为
(1)
(2)


1.2 舰船电场建模精度分析
舰船电场点电荷阵列模型建模精度分析的具体思路是:利用舰船电场仿真软件Beasy生成舰船在某一平面的电位和电场信号,基于点电荷模型的反演算法[2],求得点电荷阵列模型中各点源的强度,再代入由点电荷阵列模型正演某一平面的电位和电场值,将计算得到的舰船电位和电场值与Beasy计算结果进行对比、求得误差,由此分析点电荷模型对舰船电场的建模精度。定义舰船电位和电场建模精度的相对均方根误差计算公式为
(3)
(4)
(5)
(6)
式中:Ue为电位建模精度误差;Ex,e、Ey,e、Ez,e分别为电场在x轴、y轴、z轴方向上的建模精度误差;Uj表示平面上第j点处的实际电位;j为点电荷阵列模型正演得到的电位值;Exj、Eyj、Ezj为第j电场的实际电场三分量;xj、yj、zj为正演得到的电场三分量。
利用电磁场仿真软件Beasy建立某船舶三维模型如图1所示,该船长为130 m,船宽B=17 m,吃水深度约为5 m,海水电导率σs=4 S/m,海床电导率σf=0.1 s/m,海水深度H=100 m.1.5B(1.5倍船宽25.5 m)深度平面的舰船电场分布如图2所示。

图1 船体水线下结构边界元模型Fig.1 Boundary element model for underwater structure of ship
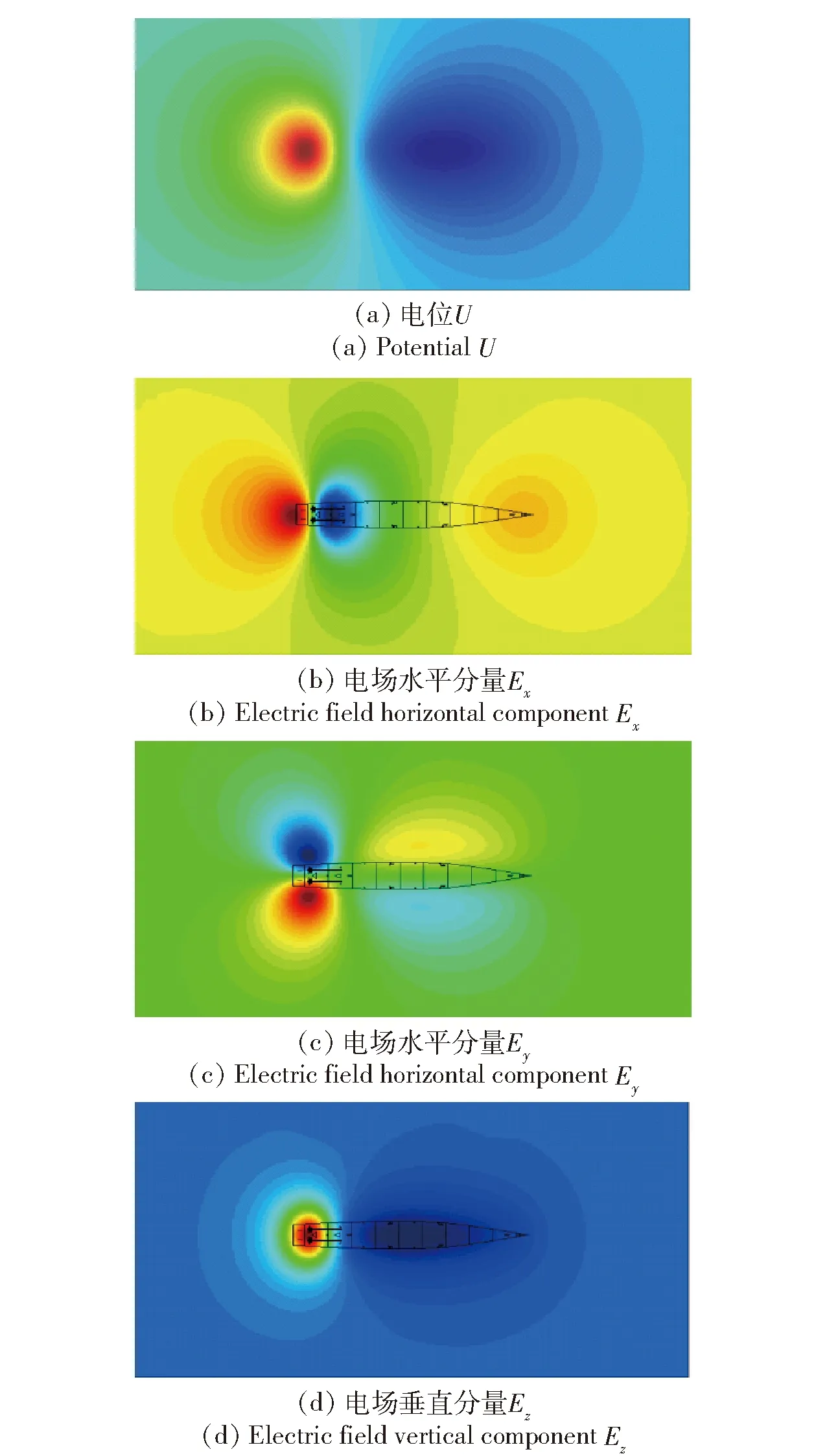
图2 水深1.5B时船舶自然腐蚀状态下电场分布情况Fig.2 Electric field distribution of ships under natural corrosion condition at 1.5B depth
舰船电场模型的点电荷阵列沿舰船纵向分布,对比位于舰船龙骨处的1条点电荷阵列模型,位于舰船龙骨及其两侧10 m处3条点电荷阵列模型,每条阵列点电荷数量N分别取2~18等间隔分布(固定每条阵列点电荷数量N的情况下,3条阵列点电荷模型的点源个数为3N,1条阵列模型的点电荷个数为N),不同阵列数及阵元数对舰船电场建模的相对均方根误差如图3所示。

图3 点电荷阵列及阵元个数对舰船电场建模的相对均方根误差影响Fig.3 Influences of point charge array and array element number on relative root mean square error
由图3可以得到以下两点结论:
1)点电荷数量越多,建模的相对均方根误差越小,但点电荷数量增加到一定程度后,相对均方根误差趋于稳定(波动在1%以内)。在实际应用中,不是点电荷数目越多越好,当每条点电荷阵列数量大于10后,单条点电荷阵列模型和3条点电荷阵列模型建模电位和电场的相对均方根误差均小于10%.因此,从跟踪定位模型维度复杂度的角度考虑,单条阵列点电荷的数量不宜超过10.
2)每条点电荷阵列上N>8时,对于电位信号U,3条点电荷阵列相比单条点电荷阵列,建模精度有一定的提升,相对均方根误差有3%~5%的提升;对电场信号,除Ey分量外3条点电荷阵列的建模精度与单条点电荷阵列的建模精度相当。Ey分量3条阵列的建模精度略高于单条阵列(相对均方根误差降低4%以下),主要是因为单条阵列无法对沿y轴方向的偶极距进行建模。而实际中,舰船的y轴方向电偶极距远远小于x轴方向的电偶极距,采用3条点电荷阵列对建模精度提升作用并不大,而在跟踪时点电荷的维度会增加3倍,因此从计算量的角度考虑,可采用单条点电荷阵列进行建模。
在上述分析的基础上,进一步分析单条点电荷阵列模型在不同深度平面点电荷数量与建模精度的关系,以舰船电位为例其相对均方根误差如图4所示,计算平面分别取1.0B、1.5B、2.0B、2.5B、3.0B,点电荷个数N取2~18.

图4 不同深度计算平面下点电荷阵列的建模精度Fig.4 Modeling accuracy of point charge array at difference depths
从图4中可以看出:随着平面深度的增加,建模精度越高,在水深大于1.5B(25.5 m)时,5个点电荷模型的相对均方根误差可小于10%;特别在深度大于3.0B(51 m)时3个点电荷模型的相对均方根误差为16.98%;在靠近舰船较近时(小于1.0B),舰船电场建模的相对均方根较大,即使点电荷个数较大单排点电荷阵列模型的误差也接近20%,其主要原因为在舰船近处各类局部腐蚀、电解偶电路产生的电场不可忽略,单排点电荷阵列难以准确模拟。
综合上述分析可知,在利用舰船电场进行跟踪定位时,舰船电场的点电荷阵列模型,可取单排点电荷阵列,测量点相对于舰船的水深大于1倍船宽时可取5个点电荷,大于3倍船宽时最少可取3个点电荷。
2 舰船电场的跟踪模型
2.1 舰船电场跟踪状态模型
由于舰船的运动状态是低动态的,其航迹可用线性动态模型描述,则跟踪模型为
xk=Φxk-1+Guk-1,
yk=h(xk)+wk,
(7)

假定舰船目标做匀速直线运动,其运动速度为v=(vx,vy)(其中vx、vy分别表示沿x轴、y轴方向的速度分量,这里只考虑在水平面内运动)。很显然,在直角坐标系中,舰船目标的状态包括x轴、y轴方向的位置,x轴、y轴方向的速度,等效电场场源的强度q=(I1,I2,I3)(采用3个点电荷对舰船电场进行建模,I1、I2、I3分别为点电荷源强度),舰船运动过程中受到的随机扰动表示为uk,采样间隔为T.则舰船目标由k-1时刻到k时刻的状态转换可表示为
(8)
由此可得
(9)
(10)
(11)

舰船状态向量可写为
xk=[xk-1,vx,k-1,yk-1,vy,k-1,qk-1]T.
(12)
根据点电荷电场的计算公式(2)式,可得到舰船电场的观测方程为
yk=Ek+wk,
(13)
式中:Ek为k时刻对应的电场值。由于这里采用3个点电荷进行建模,(14)式中i取1、2、3即可,从而得到

(14)
联合(7)式~(12)式,即可构成舰船电场跟踪问题的状态空间模型。由(13)式、(14)式可知,该状态模型为非线性模型,因此可利用非线性滤波方法对目标状态进行估计。
2.2 渐进更新扩展卡尔曼滤波
针对非线性模型的卡尔曼滤波方法有很多,通过对舰船电场目标定位方法的研究表明,PUEKF应用在电场跟踪上可以达到较好的效果[17-19]。
PUEKF算法的基本步骤如下:
步骤1时间更新。
Pk|k-1=ΦPk-1|k-1ΦT+Qk-1,
k|k-1=Φk-1|k-1,
式中:Pk|k-1为预测误差协方差矩阵;k|k-1为线性化展开点。
步骤2观测更新。
2)j=1,2,…,Npu循环执行以下更新:

式中:Npu为总执行次数;S为过程变量;λ=1/Npu;K为卡尔曼增益;Hj-1为h(xj-1)在j-1的1阶偏导矩阵,即为依据观测方程对xj-1进行求解得到观测量。
3 电场跟踪仿真算例
根据第2节的分析,利用10个点电荷单条阵列模型模拟舰船电场,在电场跟踪时3个点电荷建立电场跟踪模型,分析建模及跟踪方法的有效性,基本仿真参数设置如表1所示。
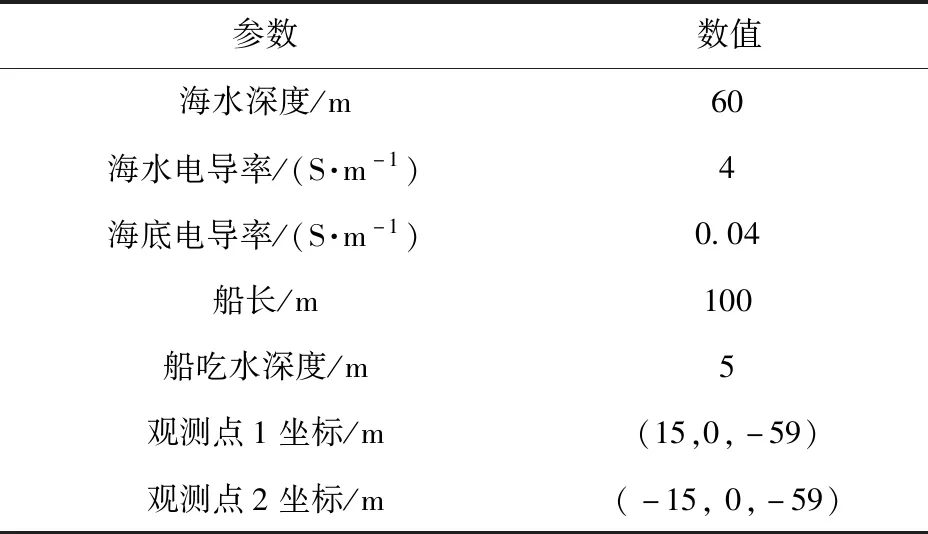
表1 数值仿真基本参数设置Tab.1 Basic parameters setting of numerical simulation

(15)


图5 最优仿真跟踪结果Fig.5 Optimal simulation tracking result

图6 最优仿真定位结果位置分量各采样点的均方根误差Fig.6 Root mean square errors of position components of optimal simulation tracking result
从图5可知,在较大初值误差下,跟踪轨迹迅速收敛到真实轨迹附近。由图6可知,定位误差随着滤波算法的开始迅速下降,并基本保持平稳,稳定后对各个方向的定位误差在15 m以下。仿真分析表明,用少量点电荷模型代替复杂点电荷阵列模型来牺牲一定建模精度,降低滤波器的维度,提高滤波器的稳定性,在电场定位跟踪中是可行的。
4 电场跟踪试验算例
为了进一步检验少量点电荷模型电场跟踪的有效性,利用海上模拟源实测数据对算法的性能进行试验验证。电场测量阵列由2个电场测量节点组成,固定于水面浮箱上,两个传感器中心点间距5 m如图7所示,玻璃钢船搭载模拟源及差分全球定位系统(GPS)在航道内运动,试验过程如图8所示。试验海区海水深度9 m,海水电导率4 S/m,海底电导率约0.03 S/m,模拟源发射极水深0.2 m,两个点电荷发射电极距离20 m,电流10 A.

图7 测量节点Fig.7 Measuring node
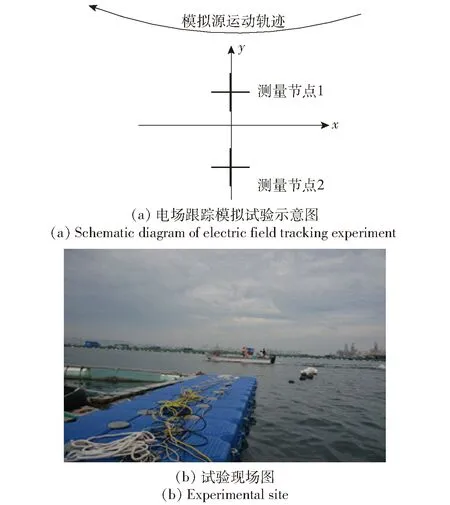
图8 电场跟踪模拟试验过程Fig.8 Electric field tracking simulation test
对PUEKF配置,由于电场对舰船的探测距离有限,一般在2 km范围内,因此假设目标源距离分布在3个等级上,即r=200 m(针对小型目标开始定位的大致距离),r=600 m(针对中型目标),r=1 000 m(针对大型目标),航向起始角设定为π/4 rad、3π/4 rad、5π/4 rad、7π/4 rad,航速约为3 m/s,共计12个初值不同的滤波器,并以最大似然作为滤波过程中的选择判据,观测噪声协方差R取环境噪声协方差(mV/m):

实际轨迹与跟踪轨迹如图9所示,各采样点估计距离相对均方根误差如图10所示。

图9 实测最优跟踪结果Fig.9 Measured best tracking result
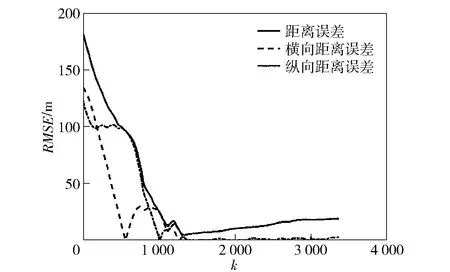
图10 最优定位结果位置分量各采样点的均方根误差Fig.10 Root mean square errors of position components of optimal tracking result
从图9可知,在较大初值误差下,跟踪轨迹迅速收敛到真实轨迹附近。图10表明,对正横距y估计误差的相对均方根在130 s后(即第1 300个采样点)基本维持在2 m以下(大部分区间在1 m以下),纵向距离x估计误差的相对均方根误差在观测点附近为6 m左右,通过观测点后最远处误差约为18 m.
上述试验结果表明,静态多模的PUEKF算法在电场跟踪中可以有效解决先验信息缺失条件下的目标跟踪问题,对少量点电荷电场模型定位误差500 m范围内可小于10 m.
5 结论
本文针对舰船电场跟踪中模型准确度与跟踪模型维度之间的矛盾,根据舰船电场点电荷阵列模型,并结合舰船电场反演算法,分析了点电荷个数、观测点水深对建模精度的影响,明确了观测点位置对点电荷个数的需求,以此作为合理控制舰船电场跟踪中滤波器维度的依据。结合渐进更新扩展卡尔曼滤波算法进行了电场跟踪仿真分析和试验验证。所得主要结论如下:
1)用少量点电荷模型代替复杂点电荷阵列模型,牺牲一定建模精度以降低滤波器的维度、提高滤波稳定性,在舰船电场定位跟踪中是可行的。
2)渐进更新扩展卡尔曼滤波方法,对少量点电荷电场模型的跟踪,能够有效提高初始误差允许动态范围,具有很高的滤波稳定性,定位误差在500 m范围内小于10 m,且计算代价较低,适合工程应用。下一步可结合实测开展实船电场跟踪试验研究。
