矿用多电机驱动刮板输送机功率平衡控制研究
2020-04-12吴佳佳
吴佳佳
(霍州煤电集团丰裕煤业公司安装分公司,山西 霍州031400)
引言
刮板输送机作为采煤工作面重要的煤矿物料运输装备,当其输送能力达到一定程度时,单个电机已经无法满足实际使用要求,此时需要同时使用多部电机进行驱动[1-4]。采煤工作面环境相对繁杂,且刮板输送机的煤矿物料输送重量并非时刻保持不变,而是带有一定的随机性[5]。这种工况条件下,容易导致不同驱动电机之间出现功率不平衡的问题,对电机造成严重损害[6]。基于此,应采取有效措施确保刮板输送机不同驱动电机之间的功率平衡,维持刮板输送机运行过程的可靠性和稳定性。
1 矿用刮板输送机基本情况概述
本文研究的矿用刮板输送机具体型号为L1000EP,该型号刮板输送机由JOY公司设计生产制造。刮板输送机与采煤工作面平行布置,输送机的整体长度为258 m,槽内宽度为1.13 m,挡煤板高度和链条中心距分别为1.25 m和0.28 m。输送机链条运行速度以及整体输送能力分别为1.41 m/s和3 500 t/h。采用的是中双链形式,链轮半径为0.165 m,齿数为7。刮板输送机同时采用三部电机进行驱动,每部电机的功率为700 kW。其中机尾设置一部电机,电机与煤壁平行布置;机头设置两部电机,其中一部电机与煤壁平行布置,另外一部电机与煤壁垂直布置。由于采用的是多部电机同时驱动,所以需要考虑不同驱动电机之间的功率平衡问题。
2 多电机功率平衡控制基本原理
2.1 功率平衡控制基本原则
刮板输送机在工作过程中,其输送的煤矿物料重量随时发生变化。对刮板输送机多电机进行功率平衡控制的基本原则,就是根据输送煤矿物料的重量对不同电机的输出转速进行合理控制,确保位于不同位置的电机输出转距之间的差值在可接受的范围内,防止机头和机尾部位驱动电机输出转距不匹配,导致电机出现欠载或者过载的问题,对电机造成不可挽回的损害。刮板输送机由三部具有相同功率的电机同时进行驱动。正常工作条件下,电机输出功率保持在最大输出功率的80%左右,如果不同电机之间的功率控制不恰当容易导致部分电机出现过载的问题。
2.2 功率平衡控制基本思路
基于上述的刮板输送机多电机功率平衡控制基本原则,并结合输送机的基本工作原理,功率平衡控制基本思路可以概述如下:由于使用的三部电机型号完全相同,因此认为不同电机的机械特征完全相同。将机头部位的两部电机等效为一部电机,其容量为结尾部位电机的两倍。假设经过机头和机尾部位电机的电流值分别为i1和i2,可以根据电流值判断外部负载情况。当i1和i2完全相同时,表明机头和机尾电机负载情况正常,不存在过载问题,此时电机功率保持平衡。当i1和i2不相等时,表明机头和机尾部位电机的功率存在不平衡问题,需要对两个电流值进行进一步判断。如果i1与i2的差值Δi始终大于0,且Δi超过了i2的5%,认为此时机头部位电机存在过载问题,需要提升机尾部位电机转动速度,确保机头和机尾部位电机保持功率平衡。相反的,如果Δi始终小于0,则认为此时机尾部分电机存在过载问题,需要提升机头部位电机的转动速度,使不同部位电机功率保持平衡。如下页图1所示为刮板输送机多电机功率平衡控制基本原理图。
3 多电机功率平衡控制系统的研究
3.1 功率平衡控制系统总体构成
如下页图2所示为刮板输送机多电机功率平衡控制系统总体结构图。从图中可以看出,整个系统由三部三相异步电动机及其对应的变频器、控制器和CAN总线构成。控制器通过对变频器的输出频率进行控制,进而实现对三相异步电机输出转速的控制。系统中不同硬件之间通过CAN总线实现数据信号的传输。结合煤矿实际情况,采用的矿用变频器型号为BPJ 1-630/1140,控制器采用的是可编程逻辑控制器PLC,具体型号为S7-1200。
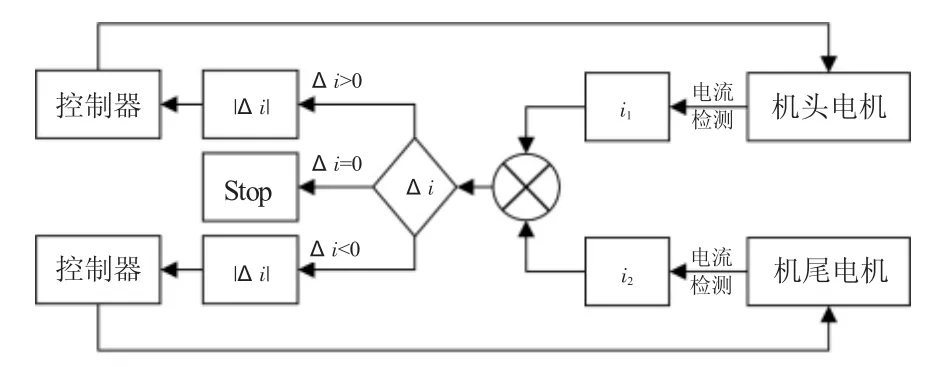
图1 功率平衡控制原理框图
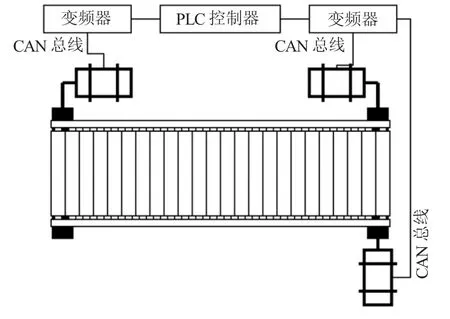
图2 功率平衡控制系统总体结构图
机尾一部电机采用单独的变频器,机头两部电机使用同一变频器,目的在于确保机头部位两部电机具有相同的输出转速。CAN总线具有良好的通信稳定性,比较适合本研究中输送距离较长的场景。变频器可以对电机运行过程中的定子电流进行检测,并将检测结果通过CAN总线传输至PLC控制器中进行分析。控制器根据分析结果输出控制信号,对变频器的输出电压频率进行控制,进而实现对电机输出转速的控制。
3.2 功率平衡控制系统方案设计
如图3所示为刮板输送机多电机功率平衡控制系统方案框图。图中i1和i2分别表示机头和机尾部分电机的电流值,通过比较两个电流值的大小可以判断机头机尾部位电机是否存在功率不平衡现象。如果机头部位电机电流i1大于机尾部位电机电流i2,表明机头部位电机存在过载现象。电机电流值与其负载大小存在正比例关系,可以根据电流值推算得到电机的负载大小,进而判断不平衡程度。控制器根据不平衡程度计算得到机头部位电机需要提升的电机转速大小,并输出控制信号,提升对应电机转速,使得无载侧链条的张力提升,进而实现机头和机尾部位电机的功率平衡。如果机头部位电机电流i1小于机位部位电极电流i2时,其控制过程与上述完全相同,不再赘述。
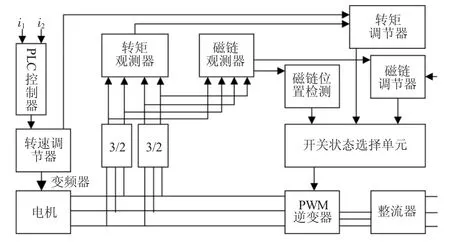
图3 功率平衡控制系统方案框图
4 多电机功率平衡控制系统测试分析
为验证本文设计的刮板输送机多电机功率平衡控制系统的可靠性和有效性,对该系统进行了模拟仿真测试分析。刮板输送机的三部电机是系统的控制对象,首先需要对电机的电流值进行检测,并且根据机头和机尾部位电机电流值的比值大小判断电机是否存在功率不平衡的问题。其次对电机转速进行调整,使不同部位的电机功率保持平衡。本文所述刮板输送机机头部位有两部电机,机尾部位只有一部电机,所以机头和机尾部位电机功率的分配比为2∶1。以下主要测试当电机功率不平衡时,查看功率平衡控制系统能否进行自动控制,将机头和机尾部位电机的功率调整至2∶1。
实践经验表明,当采煤机运动至刮板输送机的机头部位时,输送机会出现显著的电机功率不平衡问题,因此本文主要对该工况进行测试分析。经过实际测试发现该工况条件下,机头部位电机电流为180 A,机尾部位电机电流为160 A。将机头部位的两部电机等效为一部电机,则认为机头部位电机的电流值为360 A。基于已有的理论知识可知,电机负载转矩与电流值之间存在正比例关系,由此可知机头和机尾部位电机的负载转矩比值为9∶4。可以看出机头部位电机存在过载问题,需要提升机尾部位电机的转速以降低机头的负载转矩。
在对电机速度进行调整前,首先需要计算得到机头和机尾部位电机的等效转速,经计算机头和机尾部位电机的等效转速分别为1 471 r/min和1 446 r/min。由于机头部位负载相对较大,导致电机等效转速相对较高。将上述参数输入到模拟仿真系统中,可以得到转速的控制信号,结果如下页图4所示。从图中可以看出,机尾部位电机的电流值出现了一定程度的增加,说明其承担的负载转矩也增大,从而实现了机头和机尾部位电机的功率平衡。基于以上分析可以看出,本文设计的多电机功率平衡控制系统能够实现对不同部位电机转速的控制,从而实现功率平衡,整体上达到了理想的效果。
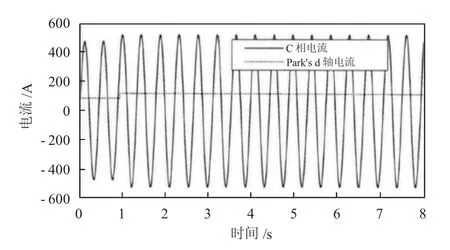
图4 机尾部位电机电流值演变情况
