基于超宽带技术的掘进机自主定位定向方法研究
2020-04-12段笑蔚
段笑蔚
(山西科林矿山检测技术有限责任公司,山西 阳泉045000)
引言
随着近年来煤炭开采深度不断加大,人工作业的危险性不断提高,为了减少人员伤亡,同时为了实现深部煤层无人化开采,进一步提高煤炭能源生产能力,国内外专家学者一直致力于无人采掘装备的研究,煤矿开展生产最主要的设备就是掘进机,掘进机的自主巡航作业功能是实现综掘面无人化的前提,它主要通过自主定位定向系统检测掘进机机身坐标和位姿参数,进而判断掘进机是否进入预定掘进航线进行作业。超宽带技术是一种新型无线电技术,将这项技术应用于掘进机自主定位定向系统中能够实现高精度测距,为综掘工作无人化奠定了基础。
1 基于超宽技术的自主定位系统原理
1.1 超宽带技术
超宽带技术的出现使无线技术进入了新的发展阶段,超宽带(UWB)在提出时是指信号占用带宽很宽。UWB是1989年在美国提出来的,并在2002年被进行了商用定义,信号带宽直接影响自身的距离分辨力,这种宽带特性使UWB无线定位系统与窄带无线定位系统相比在距离分辨精度方面具有很大的优势。UWB系统的测量精度非常高,其测距定位精度可以达到毫米级。此外,UWB定位系统发射的信号占空比低,多径信号比常规窄带信号更容易分离。由于UWB定位系统采用扩频信号,所以系统的频带较宽,在信道容量保持不变时,高带宽能够减小信噪比,由此可见,UWB定位系统具备抗干扰特性,非常适合应用在掘进机自主定位定向系统中。目前,现有的UWB定位系统在国内还不是很常见,在英国和美国应用比较广泛[1]。
1.2 TW-TOF测距法
无线定位系统是通过建立数学模型来计算对象的位置坐标的,进而实现定位功能,数学模型主要是根据与位置有关的距离变量来建立的,理论上可将UWB的定位方法分为三种,一种是根据接收信号强度进行定位的,一种是根据信号到达角度进行定位的,还有一种是根据接收信号的时间长短来进行定位的。UWB信号对时间有较高的分辨率,根据这一特点,可以设计出运用TW-TOF测距方法的掘进机自主定位方案。一般情况下,对于两个具有相同时钟源的无线电收发器来说,采用TW-TOF测距法能够得到两者之间的真实距离,还可以获得测量信号的传播时间,同时对信号到达时间进行记录。通过运用TW-TOF测距法能够实现这一功能。
2 UWB 自主定位定向系统的设计
2.1 机身坐标定位
自主定位系统的设计主要包括对机身坐标定位、机身位姿测量和基站自主标定三个部分,掘进机机身坐标定位方案如图1所示,自主定位系统应具有至少3个UWB天线的基站,用于向周围空间发射信号,机身定位点在接收到信号后会做出相应的响应。这时,利用TW-TOF测距法能够获得定位点与基站之间的距离。掘进机在巷道中作业时,其基站群的坐标是可以获得的,通过基站群的坐标可以计算出定位点的坐标。然后与预设掘进路线进行对比,能够判断出掘进机的位置与预设轨迹是否相同。如果偏离轨迹也可以得到偏差值[2]。
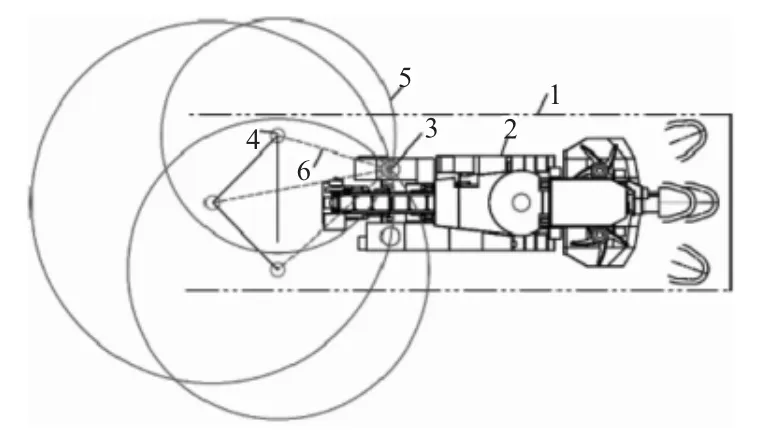
图1 坐标定位方案
2.2 机身位姿测量
掘进机机身位姿的测量主要是获得机身的3个姿态角,根据角度的测量能够得到机身的实时位姿,姿态角主要包括航向角、俯仰角和横滚角。掘进机在工作过程中应具有自动控制功能,其截割的巷道断面要满足巷道成型标准,即使在截割过程中不可避免地出现了误差,但误差也应保持在合理范围内,掘进机的截割头与机身具有一定的位置关系,通过对机身位姿的测量能够得到掘进机截割头的位置,并判断其是否满足巷道成型标准。位姿测量方案如图2所示,为了确保位姿测量的精准性,掘进机位姿检测系统应包括至少3个机身定位点。定位点的位置是不变的,基站的坐标位置也是明确的,与机身坐标定位原理相同,经过计算,便能够得到机身的实时位姿。
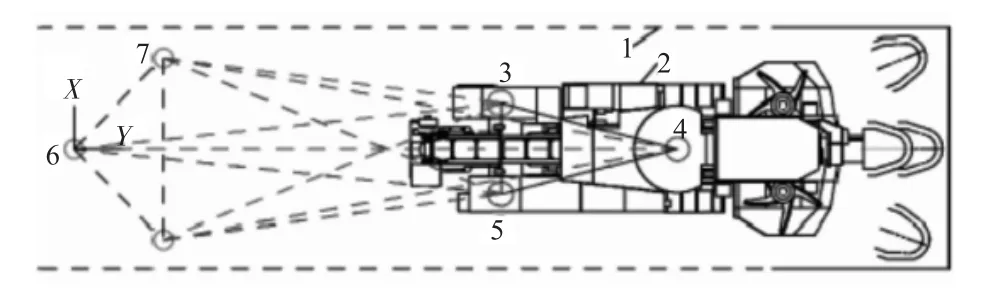
图2 位姿测量方案
2.3 基站自主标定
掘进机基站的自主标定是系统需要实现的又一重要功能。虽然我国不断地进行掘进机无人技术的研究,但由于受作业环境和状况的限制,目前使用的掘进机还是半自主的,还是要人工作业的,与全自主的掘进机还是存在很大差距的。在掘进机工作过程中,其与基站的距离是不断增加的,随着距离的增大,掘进机自主标定的误差也会变大,使得标定位置准确度大大降低,最后变得没有参考价值,系统失效。基站需要利用人工进行标定,人工标定速度慢并且危险性较高。基于此,为了增大掘进机的测量距离,需要制定出跟随性较强的自主标定方案,以便于对掘进机的位置参数进行实时测量,这样也会缩短人工作业时间,大大降低危险性。根据上述要求制定的基站标定方案如图3所示,该系统硬件应包含至少三个定位点,同时多个基站群,本系统设置了四个,这四个基站群应具有智能性,它们应具备基本的移动测量和通讯等功能。当掘进机的有效距离达到极限时,系统内的自主标定基站群开始运行,它们会按照预设的轨迹向前移动,在基站群向前移动时,其它基站群会对其测距,从而更新坐标,消除误差,由于是无人化掘进作业,所以基站群在移动时能够自动进行避障和规划路线。
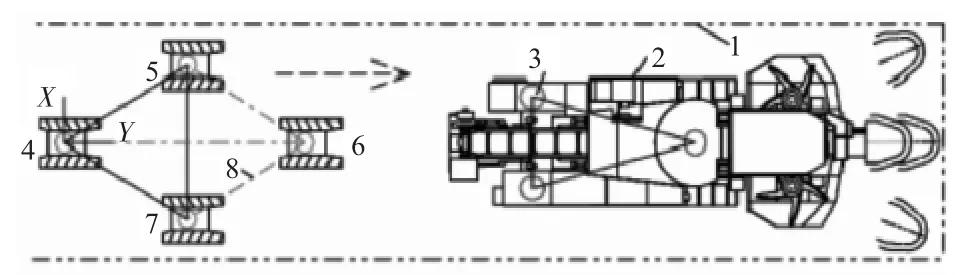
图3 基站标定方案
3 UWB自主定位定向系统精度分析
根据规定,实际巷道边界与理论之间的误差应小于10 cm,这就要求定位系统应具有较高的精度。通常情况下,系统的有效测量距离应不小于50 m,太小的测量范围在实际工作中应用价值不大。目前,我国井下掘进作业的定位系统的测量距离能达到百米。在巷道成型过程中,掘进机的最终边界误差的大小会受多种因素的影响,只有机身定位精度足够高,其它控制系统才能具有较高的精度。利用Matlab可以对系统的定位测量进行仿真模拟,最终得到系统的定位误差分布规律。该定位定向系统的参数不是直接测量得到的,它需要通过对基站测距参数进行运算来得到。所以,系统误差与测量范围有关,系统的测量范围越大,运算得到的交汇解区域越大,误差也越大。通过对系统进行Matlab仿真可以看出系统的有效测量范围已经超过了400 m,与以往传统的测量技术相比,该系统有效测量距离是以往的4倍,明显提高了测量距离,为实现掘进机无人化奠定了基础,同时也证明了超宽带技术的优越性[3]。
4 结论
从以上研究结果可以看出,基于超宽带技术的掘进机自主定位定向系统能够有效提高测量距离,为实现掘进机无人化作业提供了思路,基于超宽带TW-TOF测距技术的定位定向法减少了人工作业,工作效率也因此得到了提升,它是自主巡航作业中不可或缺的先进技术。由于掘进机工作环境比较复杂,在掘进过程中容易偏掘导致巷道错位,不能满足相关质量标准,基于超宽带技术的自主定位系统有效解决了这一问题,与其他定位定向系统相比,它能够实时对掘进机的位置状态进行监测,对机身位姿进行测量,进行基站自主标定,它是实现无人化综掘的基础。
