PEMFC系统过氧比的自适应高阶滑模控制
2020-04-11马冰心王永富
马冰心,王永富
(东北大学机械工程与自动化学院,辽宁沈阳 110819)
1 引言
为了解决能源危机和环境污染问题,当前世界各国都在加大新能源与低碳技术的开发力度.燃料电池具有能量转换效率高、清洁、环保、不受卡诺效率限制等特点,已成为是国内外新能源开发中比较活跃的研究领域之一.目前,国内外主要研究的燃料电池类型包括碱性燃料电池、直接甲醇燃料电池、熔融碳酸盐燃料电池、固体氧化物燃料电池及质子交换膜燃料电池等.其中质子交换膜燃料电池(proton exchange membrane fuel cell,PEMFC)具有高功率、高能量转换效率、高可靠性、无环境污染等优点,应用前景广阔,受到各界广泛关注,已逐渐在新能源机车和电力系统等领域得到应用[1–3].
PEMFC空气供给系统主要由空压机、供给管道、冷却器、加湿器等部件组成(如图1虚线框内所示),是PEMFC系统主要组成部分之一.根据PEMFC系统运行工况合理控制阴极空气供给流量是提高PEMFC系统输出净功率的有效途径[4–6].若系统阴极空气供给流量不足,即系统出现“氧饥饿”现象,将导致PEMFC系统输出电压急剧衰减、负载能力不足.若空气流量过高,即系统出现“氧饱和”现象,将会导致空压机等辅助部件寄生功耗过大,同时带走系统电堆过多热量,降低了PEMFC系统输出净功率.因此,合理控制PEMFC系统阴极注入的空气流量与电化学反应实际需求空气流量的比例,即过氧比(oxygen excess ratio,OER),是提高PEMFC系统输出净功率的有效方法.
为此,国内外学者对PEMFC系统过氧比控制问题展研究,文献[7–12]分别提出反馈线性化控制器、模型预测控制、线性二次型控制及微分平坦控制等方法调节系统过氧比,该类控制方法的设计需要PEMFC空气供给系统数学模型(结构及参数)完全已知的条件.但由于PEMFC系统建模过程中涉及到流体力学、热力学和电化学等众多学科内容,基于理想假设:1)空气为理想气体、遵循理想气体定律;2)空压机摩擦力矩忽略不计;3)冷却器系统的体积忽略不计;4)电堆工作温度保持恒为80◦C;5)阴极内水蒸气平衡得到很好地控制等条件建立的数学模型,难以精确表述PEMFC空气系统实际工作机理,因此基于该模型设计的控制方法难以取得较好的实际应用效果.
在基于非模型的PEMFC空气供给系统控制方法研究中,文献[13]提出的PI控制方法结构简单、可靠,易取得实际应用,但由于该PI控制器设定的参数不具有自适应性,若系统受到外界扰动或工作环境(如温度、空气湿度)变化时控制效果得不到保证.文献[14]提出的模糊PID控制方法仅根据仿真模型建立模糊规则库,缺少实验验证及系统稳定性(理论)分析,且该控制器的作用效果主要依赖于根据专家经验建立的模糊规则库的准确性.文献[15–19]分别提出超螺旋滑模控制、二阶滑模控制及基于状态观测器的超螺旋滑模控制等方法调节系统过氧比,虽不需要PEMFC空气供给系统数学模型(结构及参数)完全已知的条件,但需要系统模型(函数)的界已知的条件.

图1 PEMFC模型结构示意图Fig.1 Structure diagram of PEMFC model
滑模控制方法是解决具有外部干扰的非线性系统的一种有效方法之一,在动态控制过程中可依据当前状态迫使系统有目地的按照预定的特殊模态运动,这个特殊模态被称为滑模.系统一旦处于滑动模态就会与内部参数摄动、外部干扰等不确定性无关,因此该控制方法具有良好鲁棒性,已在许多领域建模和控制中得到广泛关注[20–22].但由于传统滑模控制器中存在高频的不连续切换项,使得系统实际控制量在时间上是不连续的,这样滑模控制器难免给被控对象带来不利的“抖振”,正是这些缺点制约了传统滑模的发展,也促进了高阶滑模控制方法的提出.高阶滑模控制器不但可使得系统滑模变量及其高阶导数趋于零或期望的范围内、提高了滑模精度,且可适用于任意相对阶的非线性系统.由于高阶滑模控制器中的不连续高频控制切换项隐藏在滑模变量的高阶微分中,这样通过对虚拟控制量(即实际控制量的导数或高阶导数)积分作用得到的系统实际控制量在时间呈连续状态,有效减弱了不连续的高频控制切换项给被控对象带来的不利“抖振”现象.近十余年,高阶滑模控制方法的研究及应用已经成为滑模控制的重要研究方向之一,得到国内外专家和学者的深入研究和广泛应用[23–27].
自适应模糊逻辑系统是对具有未建模动态的非线性系统有效建模与控制的方法之一,已在许多领域建模和控制中得到广泛关注[28–30].为此,本文采用结合自适应模糊系统设计一种新的高阶滑模控制器来控制空压机工作电压.该控制器不需要模型结构、参数及干扰的界已知的条件,且实际控制量在时间上呈连续状态.本文主要研究工作如下:1)为了便于控制器设计与分析,本文首先结合反馈控制理论将非线性PEMFC空气供给系统转化为标准形,并分析了系统的内部稳态.2)引入辅助变量对系统进行扩展,通过自适应模糊逻辑系统在线逼近扩展后系统中未建模动态、且可在线估计切换增益,并通过Lyapunov稳定性导出模糊逻辑系统与切换增益的自适应律,保证了系统滑模变量及高阶导数收敛至理想范围内;3)分别通过仿真与硬件在环实验验证了该控制器的自适应性与优越性,并且与国际文献中取得较好过氧比控制效果的控制方法进行仿真与实验对比,验证了本文设计的控制器的优越性.
2 系统模型及内部稳定性分析
2.1 空气供给系统非线性模型
为了合理控制PEMFC系统过氧比,文献[6]基于理想假设建立PEMFC空气供给系统模型,即

其中:状态变量x=分别为阴极压强、空压机转速和供给管道压强;控制量u为空压机工作电压;fff(x),ggg和ddd分别为

其中:PEMFC系统电堆电流Ist视为外界扰动,实际现场应用中电堆电流Ist变化较缓慢,如文献[6,18]中视其为常量;h(x2,x3)为PEMFC系统空压机供给空气流量;

c1∼c15与µ1∼µ4均为系统参数(见文献[6]).
PEMC系统过氧比OER与理想过氧比OERref分别可表示为[6]

结合式(1)–(2),PEMFC空气供给系统状态空间表达式可表示为

其中:σ(x)=e=OER−OERref,σ=σ(x)为滑模变量;e为系统过氧比跟踪误差.
2.2 反馈线性化与内部稳定性分析
为了便于式(3)表述的非线性PEMFC空气供给系统控制器的设计,首先结合结合反馈控制理论进行输入–输出线性化,即对非线性系统(3)输出函数y=σ(x)进行微分或重微分,直到输出方程的微分方程或高阶微分方程中出现控制量u.为实现式(3)表述的非线性系统输入–输出线性化,引入李导数的定义,即:
定义1[31–32]令的一个光滑标量函数,q(x):上一个光滑向量场,则σ(x)对q(x)的李导数的求解可表示为

相对阶数为r的单输入–单输出非线性系统的r阶微分方程可表示为[31]

那么,式(3)表述的PEMFC系统输出方程y=σ(x)的李导数Lfσ(x),Lgσ(x)和Ldσ(x)可分别表示为

由式(5)可知,系统输出方程y=σ(x)的李导数中的Lgσ(x)=0,即微分过程中控制变量u未曾出现,需要求解系统输出方程的重李导数.结合反馈线性化理论,PEMFC系统输出方程y=σ(x)的重李导数可分别表示为


由式(6)可知,LgLfσ(x)≠0,即该系统的相对阶数r=2.结合式(4)–(6),那么非线性系统(3)经输入–输出线性化后可表述为

其中:

注1由文献[7]中的注2可知α(x)≠0恒成立,结合文献[7]中式(12)(15)以及图(11)所示的实验结果可知,至少存在一时刻t=t0满足α(x)|t=t0>0.综上可知,当t>0时必满足α(x)>0恒成立.
综上可知,PEMFC空气供给系统的相对阶数r=2,小于该系统阶数3,则式(7)等效系统式只表述式(3)系统外部动态特性.则该系统稳定性还包括“不可观”的内部动态的稳定性,因此需分析该系统内部动态的稳定性[31].式(7)的标准形表述为

选取微分方程(9)的一个特解η3=x1−Va,其中

当系统输出被置零时,结合式(1)–(3)经简单整理后可得到系统零动态为

将Va运用到式(10),可得到

由文献[6]可知µ1>µ2,那么该系统零动态的平衡点是原点,即系统是最小相位的,其“不可观”的内部动态是稳定的.
3 空气供给系统控制器的设计
3.1 基于精确模型系统的控制器设计
由以上分析可知式(1)系统是最小相位的,通过引入辅助变量对系统(7)进行扩展可得到


那么,PEMFC系统(3)的高阶滑模控制器的设计问题可转化保证式(12)系统稳定性的控制器设计问题.
注2本文设计的虚拟控制律为系统实际控制量u的微分.虚拟控制律仅用于系统实际控制量u的计算,即u=该虚拟控制律并不直接作用于PEMFC空气供给系统.
定义2[25]假设系统(3)在非连续动态反馈控制下可构成闭环,并假设···,σ(r−1)为连续函数,则集合

为“r阶滑模集”,该集合满足非空,在Filippov意义下局部可积等条件,那么系统在上的运动成为关于滑模变量σ的“r阶滑动模”.
定义3[23]假设系统(3)在非连续动态反馈控制下可构成闭环,并假设σ,,···,σ(r−1)为连续函数,则集合···,|σ(r−1)(x,t)|
定理1若式(1)系统模型模型结构和参数已知的且准确性可靠,设计扩展后式(12)系统的虚拟控制律与原系统(7)实际控制律u分别为

其中:Slotine形式的滑模面S=均为正常数;增益Φ>|ψe(x,u,Ist)|恒成立.
那么,系统(12)在式(13)控制器作用下是稳定的.
此定理的证明可以通过以下步骤形成:
步骤1首先,选取Lyapunov函数为

步骤2其次,结合式(12)–(13),可得到

步骤3最后,微分式(14)并结合式(15)可得

由式(16)可知控制器(13)可使得系统(12)满足滑动模态的到达条件,即系统(12)渐进稳定. 证毕.
然而,由于PEMFC空气供给系统中存在着参数不确定、外部扰动等特性,因此难以获得系统中的精确结构与参数以及控制器(13)的精确表达式.
3.2 基于未建模动态情况下系统的控制器设计
针对系统(12)中存在未建模动态这一情况,本文采用模糊逻辑系统对系统(12)中α(x),βe(x)未建模状态在线逼近.系统(12)可表示为




图2 自适应高阶滑模控制器组成结构图Fig.2 Adaptive high-order sliding mode controller composition diagram
定理2对系统(17),采用如式(21)所示的控制器,并选取参数向量Θα和Θβe的自适应律分别为

其中:参数γ1和Mα均为正常数;投影算子pα[·]为
其中:参数γ2和Mβe均为正常数;投影算子pβe[·]为


其中:γ3,γ4,δ和ς为正常数;ϵ为较小的正常数.那么,式(21)控制器作用下系统(17)是稳定的.
此定理的证明可以通过以下步骤形成:
步骤1首先,选取Lyapunov函数为

步骤2其次,应用式(21)控制器到式(17)系统,求得滑模面S关于时间t的微分方程为

步骤3然后,微分式(22)Lyapunov函数V,并结合式(18)–(24)可得到V关于时间t的微分方程


步骤4最后结合式(24)和式(27)可知:当满足|S|ϵ时,由Lyapunov稳定性理论可知:|S|在区间外任意值均可收敛至区间{|S|||S|ϵ}内,即系统在有限时间内达到理想滑动模附近.结合文献[21]定理3可知,系统滑模变量在有限时间内须满足

其中e为自然指数.由式(28)可知该系统是稳定的.证毕.
4 仿真与分析
步骤1仿真参数选择.
针对空间状态表达式(3),该PEMFC空气供给系统模型的参数见文献[6],仿真与实验过程中选取的电堆电流如图3所示.

图3 电堆电流Fig.3 Stack current
选取自适应模糊系统的隶属度函数为

选取模糊系统自适应律参数γ1=1,γ2=400约束集Mα=103,Mβe=104,选取增益的自适应律参数分别为γ3=γ4=10,ϵ=0.01,ς=5.选取滑模面参数为λ=10,控制器参数ϖ=200.
步骤2电堆温度Tst=80◦C仿真与分析.
为了验证本文设计的控制器的合理性与有效性,根据文献[6]模型理想假设保持电堆工作在理想温度Tst=80◦C环境下进行仿真,结果如图4所示.
由图4(a)该控制器可使得空压机工作电压u迅速调达到理想值,且在时间上是连续的,有效地减弱了不连续切换行产生的不利“抖振”.图4(b)可知在该控制器可使得空压机供给空气流量h(x2,x3)随着电堆电流Ist变化而改变.由图4(c)可知,该控制器作用下PEMFC系统过氧比OER很好地跟踪系统理想过氧比OERref.由图4(d)可知该控制器可迅速使得取得较好的跟踪误差,使得跟踪误差迅速收敛到理想范围内,这也表明了在自适应高阶滑模控制器(21)作用下PEMFC空气供给系统是稳定的,同时也验证了本文设计的控制器是合理有效的.

图4 电堆温度Tst=80◦C仿真结果Fig.4 The simulink results when Tst=80◦C
步骤3电堆温度Tst=70◦C仿真与分析.
为了验证本文设计的控制器具有较好的有效性与自适应性,保持步骤2仿真中的控制器参数不变,将电堆工作温度更改为Tst=70◦C进行仿真,结果如图5所示.

图5 电堆温度Tst=70◦C仿真结果Fig.5 The simulink results when Tst=70◦C
由图5(a)可知当电堆工作温度Tst=70◦C时该控制器同样可使得空压机工作电压u迅速调达到理想值,且有效地减弱了滑模控制器不连续切换行对PEMFC系统产生的不利“抖振”.图5(b)可知在该控制器同样可使得空压机供给空气流量h(x2,x3)随着电堆电流Ist变化合理地变化.由图5(c)可知在电堆工作温度Tst=70◦C时该控制器同样可使PEMFC系统过氧比OER很好地跟踪系统理想过氧比OERref.由图5(d)可知在电堆工作温度Tst=70◦C时该控制器同样可迅速使得取得较好的跟踪误差,使得跟踪误差迅速收敛到理想范围内从而系统是稳定的,该仿真表明了本文设计的自适应高阶滑模控制器具有较好的自适应性.
5 实验与分析
步骤1搭建实验平台.
为了验证本文设计的控制器的有效性和实用性,搭建硬件在环实验平台进行实验验证.该实验平台主要包括两台计算机(上位机)、电动机、变频器、ETAS.ES910、ETAS.ES930和dSPACE.ds.12.0设备、空气压缩机、空气流量传感器等实验装置.该实验平台结构图及实物图如图6所示.

图6 硬件在环实验平台Fig.6 Hardware-in-the-loop experimental platform
首先按照TCP通信协议将两台计算机分别于ETAS.ES910和dSPACE.ds.12.0设备建立通讯,通过Daisy-chain网络形式将ETAS.ES930设备与ETAS.ES 910设备建立通讯,并按照CAN 协议将dSPACE.ds.12.0设备与ETAS.ES930设备建立通讯.然后借助上位机中的MATLAB/Simulink软件平台分别对ETAS.ES910、ETAS.ES930 和dSPACE.ds.12.0 等设备进行参数配置.通过dSPACE.ds.12.0中的I/O采集口接收空气流量传感器模拟信号,并将状态变量x和系统过氧比跟踪误差e经ETAS.ES930设备输给ETAS.ES910设备,在ETAS.ES910设备中经自适应高阶滑模算法运算后,通过ETAS.ES930传输信号量给变频器,从而调节空压机工作电压u.两台计算机分别用于控制器的实时监视与在线标定和硬件在环中变量参数的实时显示.
步骤2电堆温度Tst=80◦C实验与分析.
为了验证本文设计的控制器的合理性与与实用性,根据文献[6]模型理想假设保持电堆工作在理想温度Tst=80◦C环境下进行实验,结果如图7所示.

图7 电堆温度Tst=80◦C实验结果Fig.7 The simulink results when Tst=80◦C
由图7(a)该控制器可使得空压机工作电压u迅速调达到理想值,且系统真实控制量u在时间上是连续的,不利“抖振”较小.图7(b)可知在该控制器可使得空压机供给空气流量h(x2,x3)随着电堆电流Ist变化而改变.由图7(c)可知,该控制器作用下PEMFC系统过氧比OER很好地跟踪系统理想过氧比OERref.由图7(d)可知该控制器可迅速使得取得较好的跟踪误差,即在自适应高阶滑模控制器(21)作用下PEMFC空气供给系统是稳定的,同时也验证了本文设计的自适应高阶滑模控制器是合理实用的.
步骤3电堆温度Tst=70◦C实验与分析.
为了验证本文设计的控制器具有较好的自适应性与实用性,保持步骤2实验中的控制器参数不变,将电堆工作温度更改为Tst=70◦C进行实验,结果如图8所示.
由图8(a)可知当电堆工作温度Tst=70◦C 时该控制器同样可使得空压机工作电压u迅速调达到理想值,且有效地减弱了滑模控制器不连续切换行对PEMFC系统产生的不利“抖振”.图8(b)可知在该控制器同样可使得空压机供给空气流量h(x2,x3)随着电堆电流Ist变化合理地变化.由图8(c)可知在电堆工作温度Tst=70◦C时该控制器同样可使PEMFC系统过氧比OER很好地跟踪系统理想过氧比OERref.由图8(d)可知在电堆工作温度Tst=70◦C时该控制器同样可迅速使得取得较好的跟踪误差,使得跟踪误差迅速收敛到理想范围内从而系统是稳定的,该实验表明了本文设计的自适应高阶滑模控制器具有较好的自适应性与有效性.
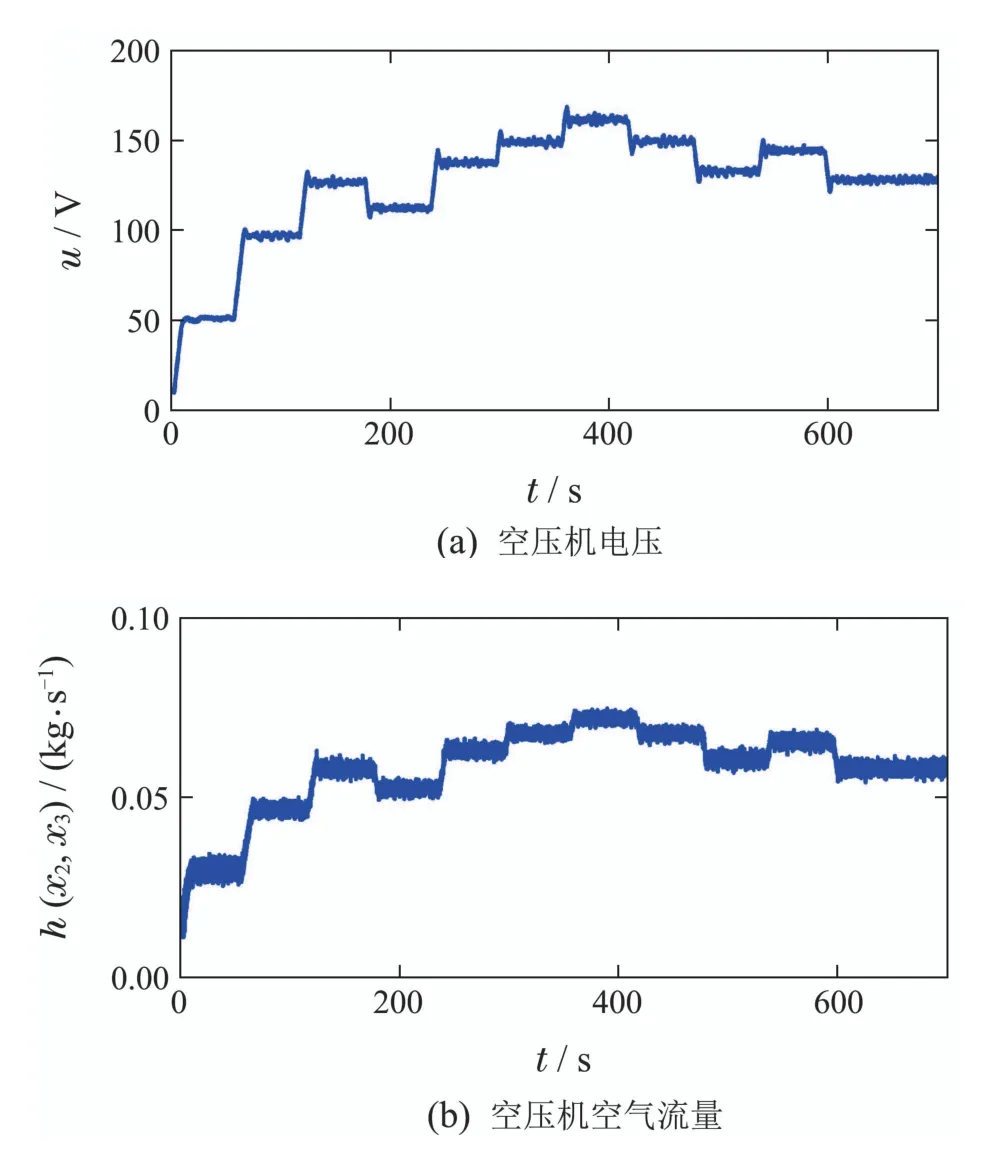

图8 电堆温度Tst=70◦C实验结果Fig.8 The simulink results when Tst=70◦C
6 对比与分析
步骤1对比仿真与实验过程参数选择.
控制器的仿真与实验对比过程中,保持自适应高阶滑模控制器(21)参数不变,选取与文献[19]基于次优算法的二阶滑模过氧比控制器进行仿真与实验对比,该二阶滑模控制器可表示为

其中:VM>0,VM取值与PEMFC系统数学模型函数的界有关,s∗(t)=h(x2,x3)−href(x2,x3),href(x2,x3)为当过氧比为理想过氧比时空压机供给的空气流量[18–19],α(t)与(t)分别为

其中:α∗>0,α∗取值与PEMFC系统数学模型函数的界有关,tMi为当=0的时间点.
注3文献[19]中选取s∗(t)为PEMFC空气供给系统的输出,故使得在该系统输出条件下系统的相对阶数r=1,故该文设计的高阶滑模控制器为二阶滑模控制器.文献[19]中控制器参数α∗,VM>0的选取依赖PEMFC空气供给系统数学模型函数的界,结合文献[19]选取参数α∗=5,VM=3.
为了验证本文设计的自适应高阶滑模控制器(21)的优越性,选取与文献[19]提出的过氧比二阶滑模控制器(29)在PEMFC工作环境Tst=80◦C条件下进行仿真与实验对比,仿真与实验对比结果分别如图9–10所示.

图9 控制器的仿真对比结果Fig.9 Controller simulation comparison result
步骤2控制器的对比.
由图9(a)和图10(a)仿真与实验结果可表明本文设计的自适应控制器(21)与文献[19]提出的基于次优算法的二阶滑模过氧比控制器输出的控制量均是连续的,可表明这两种高阶滑模控制器可减弱了滑模控制器不连续切换行对PEMFC系统产生的不利“抖振”.

图10 控制器的实验对比结果Fig.10 Experimental comparison results of the controller
由图9(b)和图10(b)可以看出两种算法下空气流量都是可根据PEMFC系统电堆电流合理的改变.由图9(c)和图10(c)仿真与实验结果可表明本文设计的控制器(21)控制器在电堆电流变化波动较大情况下响应速度更快,使得系统过氧比更迅速达到理想过氧比.由图9(d)和图10(d)仿真与实验结果可表明在PEMFC电堆电流变化波动较大情况下,该控制器可使得跟踪误差迅速收敛到理想范围内,即更迅速的使得PEMFC空气供给系统趋于稳定.因此,该仿真与实验可表明了本文设计的自适应高阶滑模控制器(21)具有较好的优越性.
7 结论
本文针对PEMFC系统过氧比控制问题展开研究,主要结论如下:
1)本文首先结合反馈控制理论将非线性PEMFC空气供给系统转化为标准形,并通过分析得知该系统内部动态是稳定的.
2)在PEMFC空气供给系统数学模型精确已知条件下,系统在本文设计的高阶滑模控制器(13)可使得系统(12)满足滑动模的到达条件.
3)在PEMFC空气供给系统存在未建模动态情况下,系统在本文设计的自适应高阶滑模控制器(21)的作用下过氧比跟踪误差最终一致有界.
4)通过两种不同温度情况下的仿真和硬件在环实验,验证了本文设计的自适应高阶滑模控制器(21)的有效性、自适应性与实用性.
5)通过与文献[19]提出的基于次优算法的二阶滑模过氧比控制方法(29)进行仿真与实验对比,验证了设计的自适应高阶滑模控制器(21)的优越性.
