二自由度机器人的网络化位置跟踪控制
2020-04-10刘义才周新宇陈鑫
刘义才 周新宇 陈鑫


摘 要:文章针对具有双边时变时延和丢包的网络控制系统,研究了二自由度机器人的PID跟踪位置控制。通过和PID控制结合时滞系统的分析和设计方法,将PID参数选取问题变为系统指数稳定性问题,接着给出了满足位置跟踪性能的控制器参数的计算方法。最后通过一个二自由度机器人实验验证了文章所提方法的有效性。
关键词:网络控制系统;二自由度;机器人;PID
中图分类号:TP273 文献标识码:A 文章编号:2096-4706(2020)01-0162-03
Abstract:This paper investigates position tracking control problem of a two degree of freedom robot for NCSS with bilateral time-varying delay and packet dropouts. By using the method of time delay system and PID control,the problem of PID parameter selection is changed into the problem of system exponential stability. Then the calculation method of the controller parameters satisfying the performance of position tracking is given. Finally,a two degree of freedom robot application example is given to illustrate the effectiveness of the proposed method.
Keywords:networked control systems;2DOF(two degree of freedom);robot;PID
0 引 言
網络控制系统能够充分体现控制系统向分布化、网络化及模块智能化方向发展的趋势,并广泛应用于遥操作机器人、远程医疗、无人机等领域中。但是数据在传输过程中不可避免地会产生网络传输时延和数据丢包的情况,这将使网络干扰系统的性能,甚至破坏其稳定性[1]。
现阶段热门的处理方法有切换系统分析方法[2]、异步动态系统分析方法[3]、随机系统分析方法[4]、预测控制分析方法[5]等。现阶段在工业应用中,PID控制仍然占据主流地位[6]。因此基于已有的PID控制算法进行改进,以适应网络控制的需要将会更有现实意义。受上述研究的启发,本文针对具有双边时变时延和丢包的网络控制系统研究了二自由度(Two Degree of Freedom,2DOF)机器人的PID跟踪控制。
1 问题描述及系统建模
平面2DOF机器人运动模型如图1所示,它由两个伺服电机和一个四连杆组成,两电机被安装在基座的固定位置(A点和B点),连杆的两个末端分别和这两个电机相连,电机带动连杆末端转动一定的角度,从而使整个连杆在平面内伸缩和摆动。2DOF机器人目标为控制E点按预定的轨迹在平面内运动。由于电机控制的是连杆末端分别绕A、B两端点旋转的角度,根据余弦定理等可得,电机旋转角和E点坐标之间正运动学模型(1)和逆运动学模型(2)。
2 控制器设计
结合PID控制,利用时滞分析方法可得定理1中的条件,然后可利用MATLAB/LMI工具箱求解控制器参数。由于篇幅原因,省略证明过程,具体可见文献[7]的详细证明推导过程。为方便数学,以下矩阵中的*代表对称矩阵。
3 实验
本文设计了半实物仿真实验来验证所提算法的有效性。控制对象采用Quanser公司的平面2DOF机器人,网络采用基于Matlab/Simulink的Truetime工具箱实现。
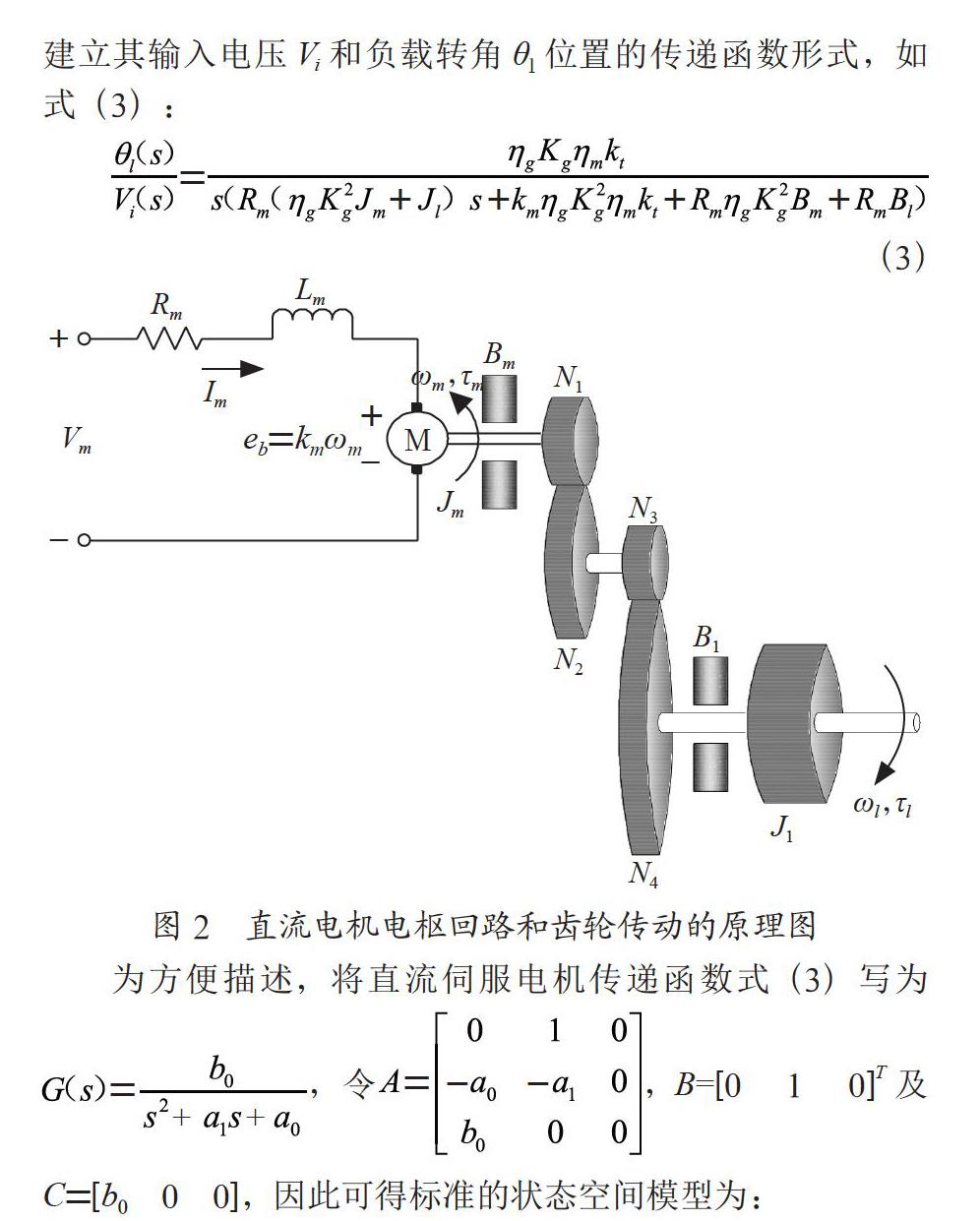
图1中采用的连杆长度为Lb=12.7 cm,同时带入其提供的参数,可得2DOF机器人的直流伺服电机输入电压Vi和负载转动角θl位置的二阶模型 。
为了验证本文所提网络化PID跟踪控制算法的有效性,设网络控制系统中的传感器采用周期h=40 ms, 接下来按照图3构建实验平台,完成2DOF的机器人网络化控制。控制目标是使E点在平面内做圆周运动。选择指数衰减率δ=3.8时的控制器参数,可以看出E点的实际运动轨迹能够较好地跟踪参考轨迹。 4 结 论 本文针对具有双边时变时延和数据丢包的网络以及2DOF机器人被控对象,将PID跟踪控制器参数选择归结为系统指数稳定性问题,实现了网络化PID跟踪控制。文章最后通过一个2DOF的机器人应用实例验证了本文所提方法的有效性。 参考文献: [1] GUPTA R A,CHOW M Y. Networked Control System:Overview and Research Trends [J].IEEE Transactions on Industrial Electronics,2010,57(7):2527-2535. [2] 刘斌,刘义才.区间化时变时延的网络化切换系统建模与控制 [J].控制理论与应用,2017,34(7):912-920.
[3] BU X H,HOU Z S. Stability of iterative learning control with data dropouts via asynchronous dynamical system [J].International Journal of Automation and Computing,2011,8(1):29-36.
[4] WANG J H,ZHANG Q L,BAI F. Robust control of discrete-time singular Markovian jump systems with partly unknown transition probabilities by static output feedback [J]. International Journal of Control,Automation and Systems,2015,13(6):1313-1325.
[5] XIA Y Q,XIE W,LIU B,et al. Data-driven predictive control for networked control systems [J].Information Sciences,2013,235(6):45-54.
[6] TRAN H D,GUAN Z H,DANG X K,et al. A normalized PID controller in networked control systems with varying time delays [J].ISA Transactions,2013,52(5):592-599.
[7] LIU Y C,LIU B. Robust H∞ output tracking control of uncertain networked control systems [J].High Technology Letters,2019,25(3):316-325.
作者簡介:刘义才(1982-),男,汉族,湖北武汉人,讲师,博士在读,研究方向:电子技术、网络控制系统;周新宇(1999-),男,汉族,湖北天门人,就读于机器人工程专业,本科,研究方向:机器人控制系统;陈鑫(1988-),男,汉族,湖北武汉人,讲师,硕士研究生,主要研究方向:机械设计、工业机器人。