试论自适应移动转向多功能园林修剪机械设计
2020-04-10万程
万程
(天津城建大学城市艺术学院 天津市 300384)
城市化背景下,风景园林项目逐渐增多,其在多元要素维护管理额基础上,为人们创造了良好、舒适的生活环境。树木修剪是园林管理的重要内容,传统管理模式下,园林修剪采用人工修剪+半自动机械修剪的方式,这种方式修剪效率低,且修剪设备容易受障碍物影响。基于此,设计一款具有自动定位导航和园林植修剪功能的机械设备已经成为当前园林建设管理的内在要求。本文基于激光传感器定位系统下,设计一款具有自适应移动转向功能的多功能园林修剪机械。
1 机械激光传感器定位系统结构组成
信息时代下,激光雷达技术获得了迅速发展,其能在大范围持续探测的基础上,为导航提供高精度的基础信息。从导航应用效果来看,激光高航具有测量范围大、测量光束小、测度精准、环境干扰小的特点。现阶段,园林产业迅速兴起,在园林枝叶修剪过程中,人们对于修剪的精度提出了较高要求,然采用人工及半自动机械修剪,则很难达到这一修剪要求,同时,修剪的效率角度,需进行修剪方法、修剪设备的优化创新。
在园林修剪设备中使用激光传感器定位系统,可以通过激光测定修剪设备与树木枝叶的距离位置,以此来满足自适应移动转向要求,实现高精度修剪。从机械激光传感器定位系统结构要素来看,其不仅包含了PC 处理器这一核心单元,而且涉及激光发射、接受装置,同时CPLD 时间间隔计时器等都是其基本的组成要素。在实际应用中,该系统能在脉冲开关的支撑下,实现PC机的自动复位,确保设备具备自适应功能,同时,通过CPLD 计时单元,修剪设备的自动化控制得以实现[1],见图1。需注意的是,在实际作业中,具体的控制指令和结果会在显示器上实时显示。
2 多功能园林修剪机械测距及移动原理
2.1 多功能园林修剪机械测距
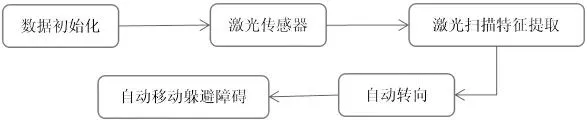
图1 自适应移动转向流程
激光测距和扫描是多功能园林修剪机械自适应一定转向的主要支撑[2]。相对而言,激光测距的实现过程较为简单,设定激光发射器为激光信号源,激光在空气中的传播速度为V,则当激光发出后,一旦受到障碍物,则激光会在反射原理下沿着与射出方向相向的状态返回,同时返回信号会被光电探测器所接收,若从发出激光信号到光电探测器所接收信号的时间为T,则实际的测距为:
S=VT/2
2.2 多功能园林修剪机械移动转向
要实现多功能园林修剪机械的精确一定,在定位导设计中,不仅要关注多功能园林修剪机械与障碍物的距离因素,同时还需考虑照度、大气通过率、障碍物漫反射率的有效把控。
就照度因素而言,激光在发出后,其光强会按照高斯均匀分布,设定激光发射器的峰值功率为TtPt,同时,发射激光束立体角和传送距离分别以Ωt和R 代替,则激光照射在物体上的实际照度可表示为:

式中:Ta表示在传输距离为R 的条件下,激光实际的大气透过率。在大气透过率计算中,需注重大气消光系数的有效把控。多功能园林修剪机械设计中,为简化设计计算过程,将障碍物的发射状态设定为满发射,则可知辐射亮度与出社射照度的关系可表示为:
然而在实际中,满发射的状态往往难以实现,这是因为光在大气中传播本身会出现衰减现象。即采用激光测距设备进行多功能园林修剪设备定位移动是,需注重漫反射率的有效测定。然后依次来获得目标的辐射出射度和被测障碍物辐射亮度。当精确获得障碍物实际亮度后,修剪设备会通过激光扫描提取障碍物具体特征,然后结合测距信息,实现修剪机械位置、姿态和工作状态的调整。需注意的是,一旦多功能园林修剪机械对于修剪精度要求较高,则在设备测距和定位过程中,需使用激光放大镜,这样能使得激光信号的能量聚集在一定的频率,同时,测试人员能实现激光辐射出射度、被测障碍物辐射亮度的高精度把控,进而为多功能园林修剪机械应用提供有效指导。
2.3 多功能园林修剪机械应用状态
现阶段,自适应移动转向多功能修剪机械在园林工程中的应用不断深入。从使用过程来看,其能在激光雷达的支撑下,通过扫描获取障碍物的距离;同时借助于地图坐标和自身位置坐标的对比,自身距离得以精确定位;此外,通过激光扫描,其还能获得障碍物的特征尺寸信息。这些信息为多功能园林修剪机械的转向和移动提供了充分的数据支撑,其有效地躲避了障碍物,确保了设备自动转向和换行功能的实现[3]。
3 基于激光传感器定位系统的多功能园林修剪机械性能测试
3.1 测距及转向可行性测试设计
要确保多功能园林修剪机械自动测距、定位功能的有效实现,在设备使用初期,就必须进行激光传感器自适应移动转向性能的有效测定。在实际测试中,不仅要进行PC 机的有效测试,还需进行激光发射与接收装置性能的有效检测。具体而言,当前方出现障碍物时,激光传感器能自主性的发出激光束,对障碍物进行扫描,同时PC 机能对扫描的信息进行分析、识别和处理,从而做出移动距离和转动角度的精确调整。
借助于PC 机对扫描信息进行分析时,需强化最小二乘法拟合的有效应用,通过拟合出来,设备中心控制处理器能实现特征曲线的有效生成,并以此为基础,进行障碍物特征信息判断。研究表明,该设备能在系统扫描园林环境的基础上,实现障碍物尺寸、距离、位置等相关信息的准确把控,这能为自适应转向多功能修剪设备的应用提供指导,可见在园林修剪机械设备上设置自适应移动和转向导航是可行的。
3.2 激光传感器定位精度测试
传统作业模式下,人们常采用人工修剪+半自动机械修剪的方式进行园林修剪,该修建方式虽然效率较低,修剪质量受人为因素影响明显,然在修剪机械使用中,其碰撞障碍物的概率角度。新时期,基于激光传感器定位系统,自适应移动转向多功能园林修剪机械的应用不仅关注设备应用的可行性,更要对其精度要素进行准确把控。对此,设计激光传感器自动作业机和非激光传感器自动作业机进行园林修剪,并对其成功避让障碍物的次数进行统计,得出表1 结果。
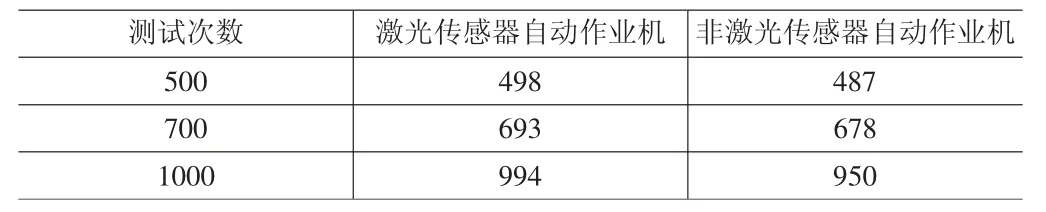
表1 两种设备成功避让障碍物转向次数统计(次)
由表1 可知,在自适应移动转向多功能园林修剪机械使用中,采用激光传感器系统进行定位导航,设备成功避让障碍物的转向次数明显较多,这表明激光测距和扫描能为自适应移动转向多功能园林修剪机械的应用提供导航支撑,其能有效提升设备的移动和转向效率,确保设备作业精度和质量,值得在园林修剪中推广应用。
4 结论
自适应移动转向多功能园林修剪机械对于现代园林产业发展具有重大影响。实践过程中,园林工作者只有重分认识到多功能园林修剪机械的优越性,并在明确其自适应移动转向原理的基础上,进行工作过程的规范控制,才能有效地提升自适应移动转向多功能园林修剪机械的运作质量,进而提升园林修剪水平,推动园林产业的有序发展。
