基于K60的电磁循迹避障小车的设计
2020-04-09顾肖峰杨宗良于明亮
顾肖峰 杨宗良 于明亮
摘 要:文中采用全国大学生智能汽车竞赛组委会认定的L车模作为载体,以NXP的MK60FX512VLQ15为核心芯片,设计一种自动避障电磁循迹智能小车系统。为了提高电磁小车在室内和室外运行的稳定性和速度,增加识别坡道和横断路障的准确率,软件上运用了差比和与归一化拟合处理电感值、增量式PID控制电机、位置式PID控制舵机等算法,硬件上运用了运算放大电路放大电感型号,单片机内部模数转换模块将电感的电压转换为数字量,BTN7971B驱动电机,MVR1EB测距模块和超声波相配合越过障碍物,运用蓝牙模块在线远程调试或者控制小车,通过上位机获取小车具体信息,OLED显示实时参数标志位。最终结果表明,该电磁寻迹智能小车系统在实际的比赛中运行平稳,性能可靠。
关键词:K60;PID;循迹;电磁传感循迹;避障;物联网技术;嵌入式
中图分类号:TP271文献标识码:A文章编号:2095-1302(2020)03-0-04
0 引 言
第十四届全国大学生智能汽车竞赛新增加室外电磁组,是为实现竞赛的“立足培养、重在参与、鼓励探索、追求卓越”的指导思想[1]。在电磁循迹广泛应用于生活各个场景之下,大赛新增加室外电磁组,其与以往传统组别不同,其赛道仅仅是一根电磁线,小车需通过特定的元素如:正六边形环岛、坡道、横断路障、自动停车等。小车以32位微处理器MK60FX512VLQ15[2]作为主控芯片,利用电感电容LC谐振获取赛道位置信息。位置信号经过运算放大整流后传入微处理器的ADC进行数字化,再由软件进行归一化等处理,得到具体的位置偏差。避障运用了MVR1EB测距模块和超声波测距模块相结合。
1 整体设计方案
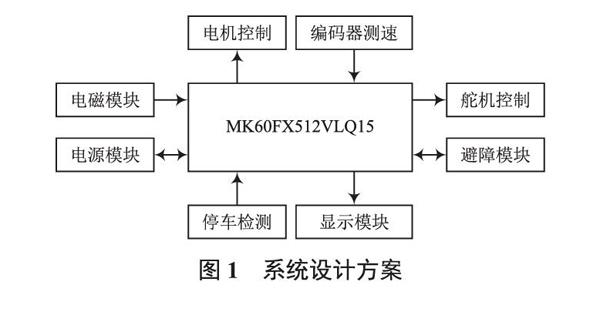
本系统通过电机PID闭环与舵机PD控制,电磁模块获取位置信息,停车检测模块获取磁铁的变化、显示模块可用于调试与显示[3],如图1所示。
2 硬件电路设计
2.1 电机驱动电路
电机驱动电路采用英飞凌大功率驱动芯片BTN7971B组成的全H桥驱动模块,具有过热过流保护功能。双BTN7971B H桥驱动电路具有强劲的驱动和刹车效果,最大电流43 A。
在程序上运用PWM信号来控制每路BTN的输出,如图2所示,用编码器测定电机的转速,通过增量式PID调节PWM,进而控制电机转速。单片机输出PWM通过隔离芯片74LVC245到BTN7971B,隔离芯片如图3所示。
2.2 电磁检测模块
根据电磁学的电磁感应可知,导体中通入变化的电流(如按照正弦波规律变化的电流),相应导体的周围会产生变化的磁场,且磁场的与电流的变化具有一定的规律(即毕奥—萨伐尔定律)[4]。在此磁场中放置一个由线圈组成的电感,则此电感就会产生感应电动势,该线圈产生的感应电动势与通过线圈的磁通量的变化率成正比,公式如下:
(1)
由于导体周围磁感应强度的方向和大小不同,产生的感应电动势也有所不同,因而可以确定电感所处的空间位置[5]。电磁模块主要流程如图4所示
图4中选频时依照进行选择,其电路如图5所示。
2.3 电源模块
整个系统的正常工作离不开电源模块[6]。所需供电电压如下:最小核心系统为3.3 V,编码器[7]为5 V,电磁模块为5 V、舵机驱动为5 V、OLED显示为3.3 V。因而用LM1117-5 V和LM1117-3.3 V单独给核心板供电;舵机驱动采用DC-DC LM2596S-5.0,其最大能输3 A。其余外设全由另一个LM2596-5.0和LM1117-3.3 V供应。电源模块电路如图6~图8所示。
2.4 舵机模块
由于舵机是使用的SD5舵机,其为三线舵机,包含:信号线、正极、负极。PWM信号通过74LVC245隔离芯片直接与舵机信号口相接,如图9所示。
2.5 避障模块
采用超声波测距和MVR1EB模块,前者采用普通GPIO口,后者采用UART串口获取,两者都为5 V供电,上下垂直放置。
2.6 测速模块
本系统采用512线编码器,编码器自身直接输出旋转方向和脉冲。由于K60自带正交解码,因而使用更方便,如图10所示。
3 软件设计
从硬件电路可知,软件部分由三部分:電机驱动算法、舵机驱动算法、避障算法。
3.1 电机驱动算法
本系统是一个闭环系统,采用增量式PID控制算法[8]。PID中P为比例项,I为积分、D为微分。增大P会缩短反应时间,过大会导致过调。增大D会使得系统区域稳定,但会延时。通过多次调试得到合适的PID值[9],算法流程如图11所示。
3.2 舵机驱动算法
舵机控制算法为开环控制,采用位置式PD控制。由电磁模块获取位置信息的感应电动势,通过K60的12位A/D转换,将其转化为数字信号;再通过不同位置的电感之间进行拟合归一化处理,差比和后获得一个位置偏差值;将此位置偏差值传递给PD算法,同时和丢线算法线结合[10],判断方向,最后输出PWM控制舵机,其流程如图12所示。
3.3 避障算法
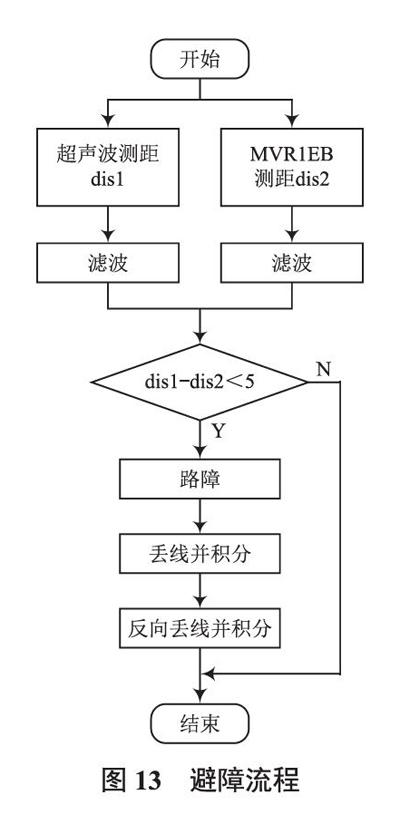
通过一个超声波一个MVR1EB激光测距模块,可以获取到两个距离。由于超声波具有发散性,因而在遇到坡道等相似路径或者物体时,会出现测不准,而激光由于聚合性高,当倾角固定的情况下,几乎不会出现测不准。所以当超声波和激光模块的距离相差非常小时,则遇上了横断障碍;当两者差距很大并且超声波的数值跳动大时,很有可能是坡道。
之后通过对速度进行积分,判断何时避过障碍物,流程如图13所示。
4 结 语
本文主要分析第十四届“恩智浦杯”智能汽车竞赛中的室外电磁组,以电磁循迹、归一化,差比和处理电感为主,测距避障为辅,舵机PD控制和电机闭环PID控制相辅相成。结果表明,本系统在实际的比赛中运行平稳,性能可靠。
参 考 文 献
[1]卓晴,黄开胜,邵贝贝.学做智能车:挑战“飞思卡尔”杯[M].北京:北京航空航天大学出版社,2007.
[2]李维康,项华珍,刘海刚,等.电磁引导小车控制系统设计[J].工业控制计算机,2014,27(5):57-58.
[3]王盼宝,樊越骁.智能车制作:从元器件、机电系统、控制算法到完整的智能车设计[M].北京:清华大学出版社,2017.
[4]秦磊,王佳宇,黄名扬,等.基于单片机的电磁循迹智能车系统的设计[J].物联网技术,2018,8(7):102-104.
[5]叶选繁,常郝,陈震元,等.基于KEA微处理器两轮直立电磁智能小车设计[J].电子世界,2019(8):145-147.
[6]谭小刚,张卓然,杜鹏浩.基于电磁传感器的智能小车设计[J].湖北汽车工业学院学报,2012,26(3):73-76.
[7]高海沙,丁晓慧.基于MC9S12XS128的电磁智能小车的硬件设计[J].微型机与应用,2016,35(7):28-29.
[8]肖文健,李永科.基于增量式PID控制算法的智能车设计[J].信息技术,2012,36(10):125-127.
[9]朱里红,王定文.基于模糊PID的电磁循迹小车控制系统[J].兵工自动化,2016,35(2):44-47.
[10]谭浩强.C语言程序设计[M].北京:清华大学出版社,2006.
