浅谈低空无人机测绘精度影响因子
2020-04-08朱闫霞周玉雄
朱闫霞 周玉雄
摘 要:低空无人机测绘遥感相对大飞机测绘遥感来说具有低成本、高机动、高时效、气候影响小等特点已广泛应用于基础测绘中,特别是局部小范围进行基础测绘时,以其先天的优越性可以取代外业全数字化测图和大飞机航空摄影测量,该文从对影响低空无人机测绘精度的航飞质量和影像质量的两大因子分析,进一步从硬件选型角度剖析了分别提高这两大因子质量的子因子,并对相机设置给出了建议,最后还对畸变差检校做了初步研究,对重做畸变差检校的条件做出了定量性地建议。
关键词:低空无人机(UAV) 摄影测量 感光度 畸变差
中图分类号:P231 文献标识码:A 文章编号:1672-3791(2020)02(a)-0001-02
目前市场上部分无人机低空测绘遥感都难以达到预期的精度要求,特别是大比例尺基础测绘项目。目前已有一些文献资料从像控点的布设,专业处理软件、技术手段等角度来试图提高低空无人机测绘成果精度。该文从UAV的航飞质量和获取的影像质量两大因子分析,从而提出一些建议来提高UAV测绘产品精度。
1 低空无人机测绘遥感设备的关键部分
低空无人机测绘遥感系统主要由飞机的机体、飞控系统、POS系统(通常是GPS+IMU)和航攝传感器(即相机)4个部分组成。飞控系统包含飞机上自动控制系统和地面站两部分,主要保障飞机能按指令完成任务,保障飞机的可靠性和安全性。POS系统主要配合飞控系统,将飞机的位置和姿态信息及时传递给飞控系统,同时记录(多采用内插技术)相机曝光点的位置信息和姿态信息。从成本上考虑,低空无人机测绘遥感系统上的POS系统一般精度很低,对后面高精度数据处理帮助不大,因此该文将从飞机的机体和相机的选型两个角度入手,阐述它们对测绘精度的影响。
2 低空无人机测绘精度的主要影响因子
航飞质量、影像质量、外业像控点的密度和分布、内业处理工艺是影响低空UAV测绘成果精度的主要因子。目前外业像控点的布设已有专门指导规范,而内业处理工艺也比较成熟,因此航飞质量和影像质量是目前市场上部分无人机测绘成果精度达不到预期目标的主要因素。
而航飞质量主要是指影像重叠度、影像单位像素对应地面分辨率、影像俯仰角、测滚角和旋偏角、航高一致性和测区覆盖无漏洞性;影像质量主要包括影像的清晰明暗度、影像的云层覆盖率。
目前市场上的UAV在重叠度和测区覆盖无漏洞性方面都采用提高航向和旁向重叠度的方式来飞行,地面分辨率方面采用设计飞行相对最高航高这一点来保证。影像质量中的云层覆盖率采用优质天气状况来规避。因此,难以保证的是倾角(包含俯仰角和测滚角)和旋偏角以及影像质量中的清晰度。
2.1 无人机机体
目前市场上有多种无人机型号,主要分为两大类:重量较轻的手抛型无人机和重量较重的滑跑或弹射的无人机。无人机机体在飞行过程中的一个重要技术参数是飞行姿态(俯仰角、测滚角和旋偏角)要控制在一定范围之内,通常俯仰角和测滚角要控制在5°范围内,最大不超过12°,而旋偏角要控制在15°范围内,最大不超过30°[1],当这些角度超出规范规定范围时,则会造成因视角变化大而带来的同名像点观测不准而引起的空三加密整体精度降低的问题。影响这些的一个最重要因素就是飞机机体的抗侧面气流性。从惯性定律来讲,质量大的物体惯性就大,但体积大的物体受气流的面积就大,因此要想减小侧面气流对飞行姿态的影响,就要增大机体质量,减小机体表面积(不含机翼),所以在要求高精度的后期测绘成果情况下,无人机选型时,尽可能地选择机体受侧面气流影像小的机体,即机身小的机体,同时在发动机功率足够的情况下,优先选择重量大的飞机。
2.2 无人机测绘遥感传感器
相对无人机的机体来说,整个系统的传感器,即普通单反相机,对测绘精度影响更大。相机主要由两部分组成,即机身(包含电池)和镜头。机身和镜头两者对测绘精度影响都很大。
2.2.1 相机机身感光器CCD
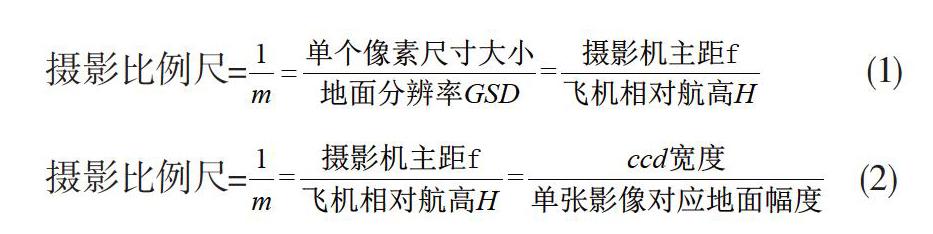
机身中最重要的CCD(部分相机是CMOS,该文后面部分将只写CCD)和处理器。其中CCD最重要的3个参数是感光度、像素数量和单个像素尺寸大小。单个像素尺寸大小越小,像素尺寸小的CCD像元之间,因制作工艺的问题,存在漏洞现象就越普遍,因此电流相互干扰就越大,噪点就越多,加上光线衍射现象,感光度会越差。在相同进光量和相同感光度情况下,单个像元尺寸小的相机拍摄出来的影像会偏模糊。在相机单个像素尺寸大小确定的情况下,当镜头(在此指定焦镜头)选定后,要获取某个指定GSD(地面空间分辨率)的影像,则飞机的飞行的相对地面高度就确定了。飞机的相对地面高度由式(1)确定:
摄影比例尺= (1)
摄影比例尺= (2)
由式(2)可知:当CCD幅宽确定(通常是由相机机身自身特性决定),则飞机相对地面高度越高,则单张影像对应地面的幅宽就越宽,单张影像覆盖地面面积就越大,整个测区可以拍摄更少的相片,可以减少测区相片数量,在外业像控点数相同条件下可以提高单位相片上的像控点数,间接效果是缩短了布点基线间隔。而CCD幅宽=CCD单个像素尺寸大小×CCD宽度方向像素数量,因此,在像素尺寸不能太小的情况下(太小在现有工艺条件下容易产生噪点),要减少整个测区相片数量,则尽可能地用全幅相机(CCD尺寸为24mm×36mm)或中幅相机(CCD尺寸为36mm×48mm),前者代表有目前广泛用于航测的佳能5D MarkII和尼康D800/810相机,后者的代表有飞思P65+。
大CCD幅宽还有助于提高航摄影像的基高比,基高比的定义见式(3):
(3)
其中摄影基线L为飞机拍摄左右两张影像时相机镜头所处各自位置的连线,当飞行相对航高确定后,要提高基高比,只能增大摄影基线。
2.2.2 定焦镜头
与机身同样重要的还有镜头。镜头上有几个技术指标,分别是主距、最大光圈和畸变系数[3]。用于测绘遥感的相机镜头一个非常重要的特性就是定焦,拍摄过程中焦距不变,从著名的共线条件方程中可以看出后期数据处理的目标是解求出感兴趣目标地物的空间三维坐X、Y、Z,而9个旋转矩阵参数和Xs、Ys、Zs是中间要解求的元素(中间成果),后期数据处理中一般是通过空三加密的方式解求的。一般一个空三加密解算测区多采用同一款相机拍摄,在光束法平差中为减少未知数数量,并且要求像方坐标为观测值,因此相机镜头主距是不可变的,为定值,通常要求精确到微米级。
2.2.3 航拍时最佳光圈
通常一款镜头有它的最佳解析力,即镜头的分辨率,镜头分辨率较低时会影像会出现模糊现象,即锐度低。
通常一款镜头的锐度处于光圈值两端的最差,例如f/1.4和f/22的最差,中间值最好,但一般最大光圈值降低两档后的锐度接近或基本等同于最佳锐度,即最佳解析力。因此航摄时所用光圈最好不要用最大光圈,建议使用最大光圈减小两档后的光圈。
2.2.4 相机镜头的畸变
相机镜头的畸变,主要指相机镜头的光学畸变差,它是影响像点坐标质量的一项重要误差。相机镜头的畸变主要分为径向畸变差(Radial Distortion)和偏心畸变差(Decentering Distortion)两种。
普通民用单反相机拍摄液晶显示器上的标准格网的影像,因此普通民用单反相机用于测绘,在所拍摄的航片实际使用过程中,必须要考虑其畸变,即通常需要对其镜头做去畸变改正。该项工作一般认为可在无人机航摄前做,也可以在航摄后做,但笔者根据大量实际生产中光束法平差最终的像点观测精度(如patb平差结果的sigma值)结果,建议航摄前检校。
目前难以判断的是相机拍摄多少架次或相隔多长时间需要重新检校,笔者经过多个项目的实际生产研究发现,可以根據上一个项目中空三加密解算时平差收敛的sigma值(代表像点的观测精度)的大小来判断相机在这次航拍前是否要重做检校,笔者实验的结果是当平差收敛的sigma值在1/2个像素左右,如佳能5D MarkII相机CCD像元大小为6.41个微米,当像点观测精度达到3左右时,表明当前已知的畸变差系数同当前相机镜头的状态符合。当平差收敛的sigma值超过2/3个像素但小于1个像素时,表明当前已知的畸变差系数已经开始同相机镜头状况不符合了,需要重新检校,如果不重新检校,则需要多布设外业像控点,否则精度会偏低。当sigma值超过1个像素,则当前已知的畸变差系数完全不能满足高精度的测绘需求,必须重新做畸变差检校。
3 结语
该文主要从低空无人机测绘设备系统方面分析了影响低空无人机测绘精度的因子,指出了无人机的机体的稳定性和抗风性对航摄影飞行质量的影响比较大,无人机选型时建议选择质量大但机体的有效面积小(不含机翼)的无人机。相机包括镜头对影像质量影像比较大,从基高比和单位相片上的有效像控点数量比上看,大CCD(或CMOS)幅面的相机要优于小幅面的相机,因此笔者建议优先选择全画幅或中画幅单方相机,优先选择高感光度效果号的相机。另外从相移补偿上考虑,部分相机具有光学防抖功能,分机身防抖和镜头防抖两种,优先选择带有光学防抖功能相机。在镜头的选定上,建议选择定焦大光圈相机。在设置上,从成像清晰度上考虑,同高感效果好的机身搭配时,可在最大光圈基础上,降低两档光圈来设定。在室外光线比较强的情况下,可以使用最优高感,即是不引入明显噪点时的最大感光度。最后所有低空无人机测绘遥感相机都是非专业量测相机,镜头带有明显的畸变差,因此,在生产过程中必须做相机畸变检校,笔者建议在航飞前做检校,该文最后还给出了判断何时应该重做畸变检校的一般判断原则。
参考文献
[1] CH/Z 3005-2010,低空数字航空摄影规范[S].2010.
[2] 张剑清,潘励,王树根.摄影测量学[M].武汉:武汉大学出版社,2009.
[3] 王朝南.光圈与光圈系数简论[J].照相机,2001(1):20-21.
[4] 马永政.无人低空遥感系统的设计与实现[D].解放军信息工程大学,2009.
