基于信息熵的城轨车辆应变传感器优化布置
2020-04-08张子璠刘汉文
张子璠, 李 强, 刘汉文, 丁 然
(1.北京交通大学 机械与电子控制工程学院, 北京 100044; 2.东风汽车公司技术中心, 武汉 430058)
目前城轨车辆构架的可靠性试验普遍采用布置传感器的方法,通过跟踪测试,获得符合我国线路特征工况下的危险部位的结构应力信息,从而达到指导结构可靠性设计的目的.然而目前构架上的传感器主要依靠经验布置,位置和数量的选择存在较大主观性.因此研究科学的传感器布置方法,对构架的健康监测具有重要意义[1].
目前通用的传感器优化方法包括模态动能法、有效独立法和模态置信准则法等[2].有效独立法是目前传感器优化方法中使用最广泛的一种方法,该方法的中心思想在于选择对目标模态线性独立性贡献最大的测点,从而可以从有限的传感器中获得最多的结构信息,然而其缺点在于容易选择一些振动能量较低的测点.鉴于此,学者们从不同角度提出了基于能量加权的有效独立法,有效改善了传感器布置效果[3-5].
对于转向架构架这样的大型复杂结构,其有限元离散网格通常可以达到数以万计,由于测点分布较密,通常会遇到传感器冗余配置的问题,即相近的2个测点同时被选中[6-7].Stephan[8]定义了一种测点间模态矩阵的范数距离,距离小于门槛值的测点模态信息高度相关,则这些测点只会保留一个,避免了冗余性.Papadimitriou[9-10]基于贝叶斯参数识别理论,以信息熵为传感器优化目标函数,从理论上证明了冗余配置来源于模型的不确定性.在Papadimitriou的基础上,Vincenzi等[11]和Yang等[12]分别从不同角度改进了方法,进一步减小了配置冗余性.
通常情况下,工程中大部分的结构健康监测案例中,都是以监测结构位移为主,因此传感器选择加速度传感器或位移传感器,布置方案以优化结构位移模态为目标.而本文的目的是监测轨道车辆转向架应变响应,因此,本文基于应变模态理论拓展了Papadimitriou的工作,在其基础上提出了一种新的传感器配置方法,提高测试信噪比,减少了配置冗余.
1 传感器优化布置
1.1 基于信息熵的模态识别
对于一个线性动力系统,真实测量响应与通过结构模型预测的响应满足方程:
y(m)=Lx(m,θ)+Ln(m,θ)
.
(1)
式中:y(m)∈RN0,x(m,θ)∈RN1(m=1,…,N)分别为实测响应时间序列和指定模型参数下所有自由度的计算响应时间序列,N0为实测自由度数量,N1为模型所有自由度数量;θ为选择的模型参数向量;n(m,θ)为由于测量时产生的噪声误差和模型建立误差而产生的响应预测误差;L∈RN0×N1为每行只包含1个不为0元素的观测矩阵,通过它建立起实测自由度和模型全部自由度间的联系.例如Lij=1表示模型第j个自由度选中布置在第i个待选位置上.
根据贝叶斯参数识别理论,模型参数的不确定性可按照某种统计分布刻画,在已知测量数据信息的条件下,其概率密度函数为
(2)
式中:π(θ)为θ的先验分布;C是归一化参数,保证式(2)的积分结果为1;Σ表示响应预测误差n(m,θ)的协方差矩阵;det[·]表示求矩阵行列式;J(θ|Σ,D)表示实测响应时间序列和模型计算响应时间序列间的欧式距离:

.
(3)
按照贝叶斯理论,模型参数是随机变量,而模态识别问题则为其某一估计值的实现,因此需要刻画真实值与估计值的误差,利用信息论中的信息熵概念,则可以实现对这种误差的唯一标量度量.参数θ的信息熵定义为

(4)
式中,Eθ[·]表示θ的数学期望.
联立式(2)和式(4),当实测数据时间序列D趋向于无穷时,信息熵渐进趋近于[10]:
(5)
式中:Q(L,Σ,θ)为Fisher信息阵,其渐进估计为
.
(6)
对于应变模态识别问题,可将式(6)简化为
Q(L,Σ,θ)≈[LΨ]T[LΣLT]-1[LΨ].
(7)
由以上推导可以看出,Fisher信息阵行列式越大,熵值越低,信息量越大,识别出来的参数不确定性越小.因此为保证实测数据包含应变模态最多的信息,需保证Fisher信息阵行列式最大化,并且Fisher信息阵仅由应变模态矩阵、观测矩阵和预测误差的协方差矩阵决定.
1.2 参数对结果的影响
式(7)影响Fisher信息阵的一个因素为预测误差的协方差矩阵Σ,由前文叙述所知,Σ由两部分构成,一是测量时产生的噪声误差,二是模型建立误差.假设两种误差间相互独立,则Σ可表示为
Σ=Σ1+Σ2.
(8)
式中:Σ1为测量时产生的噪声误差的协方差矩阵;Σ2为模型建立误差的协方差矩阵.
假设测量过程中各个自由度的噪声相关性很低,可忽略不计,则各测点间的协方差为0,Σ1为对角矩阵;考虑到模型建立时,各测点间存在一定的相关性,协方差不为0,可假设Σ2为主对角线元素为1的对角矩阵.
研究表明,当采用Σ1非单位矩阵形式时,可以明显改善有效独立法的测点振动能量低、信噪比不高的缺点,如有效独立-原点留数法等.由于Σ1主对角元选取没有统一的标准,考虑到本文优化的对象为应变传感器,所以采用模态应变能进行修正.结构节点所具有的模态应变能可表示为
(9)
式中:MSEn为测点具有的模态应变能;kn为刚度矩阵;Ψm为第m阶应变模态振型;Ψmn为第n个测点第m阶应变模态振型.
实际测量中,传感器应尽量布置在误差方差较小或振动能量较大地方,即能量和方差成反比,所以本文选择模态应变能倒数作为Σ1主对角元.
然而上述方法中,均未考虑Σ2的影响.但随着近年来研究的深入,研究成果表明,忽视模型误差是造成传感器冗余布置最主要的原因,因此Papadimitriou提出了一种考虑测点空间距离的相关函数,用来表征Σ2:
(10)
式中:Σii和Σjj表示自由度方差,通常取为1;δij表示自由度空间距离;λ为相关长度,控制着自由度间的相关性.
2 算法过程
本文采用序列法求解Fisher信息阵行列式最大值,其原理是首先确定备选自由度,进而根据目标函数每次从剩余自由度中增加一个或从备选集中减少一个自由度逐步逼近最优解.基于序列法的传感器优化配置步骤如下:
1) 计算构架应变模态和模态应变能,选取所有模态共同包含的大应变能自由度,作为备选集;
2) 计算Σ1和Σ2.取Σ1为模态应变能之和的倒数,由于各阶模态下的应变能存在数量级上的差异,为保证测点对每阶模态的响应处于同一水平,采用归一化做法,即每阶模态应变能最大值为1;
3) 依次从备选集中选取一个自由度,将其添加到观测矩阵L中,根据式(7)计算Fisher信息阵,保留其行列式最大值所对应的L,从备选集中删去该自由度;
4)重复步骤3),直至传感器数目达到预设值.
3 传感器优化布置评价准则
为了对所得结果进行定量地比较,需要一套相应的传感器配置评价标准.本文选择三个独立的评估标准来评估所选传感器位置的适用性.
3.1 Fisher信息阵行列式
由第2节内容可知,求传感器最优配置的过程即为Fisher信息阵行列式最大化过程,行列式越大,测点所包含的模态信息越多.为了比较结果,采用无协方差矩阵的Fisher信息阵FIM的行列式作为评判依据:
det(FIM)=det(LΨ)T(LΨ).
(11)
行列式值越大,效果越优.
3.2 模态置信准则
模态置信准则通常用来评判模态向量之间线性独立程度的大小,其公式为
(12)
式中Ψi和Ψj分别为已选测点组成的应变模态矩阵中的第i行和第j行.
MAC矩阵的非对角元素越小,模态向量间的独立性越高,识别效果越好.
3.3 最近距离
最近距离(nearest neighbour distance, NND)是统计学中一种常用的距离度量值,用以衡量任意测点与其最邻近测点的平均距离,其数学定义为
(13)
将最近距离标准用于传感器配置评价,NND值越大,则表明传感器配置的聚集效应越小,覆盖范围更优.
4 仿真算例
4.1 城轨车辆构架建模实例
该型转向架是轴承外置式无摇枕转向架,主体为H型钢板焊接结构,主要由侧梁、横梁、纵向辅助梁和空气弹簧支撑座等组成.侧梁为箱型结构,横梁与侧梁焊接,其上焊接有电机吊座、齿轮箱吊座以及牵引拉杆座等.为提高构架刚度,在两横梁之间焊接有管型结构的纵向辅助梁,其上焊接有横向减振器座和横向止挡座.
将构架三维实体导入有限元处理软件中,针对构架的结构特点,采用三维实体四面体单元(SOLID92)对其进行有限元离散,网格尺寸为10 mm,整个构架共离散为898 137个单元,1 667 120个节点.离散模型如图1所示.
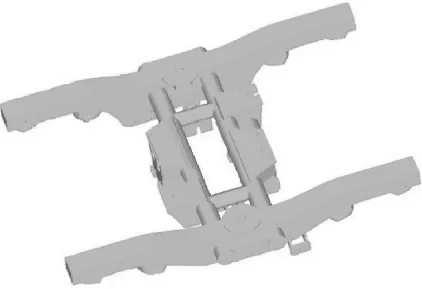
图1 构架有限元模型
基于模态识别的传感器布置的结果直接由选取的模态数决定,由于轨道车辆构架约束关系复杂,很难确定构架的约束模态,因此本文仅讨论构架自由模态下的布置方案.由于列车在运营过程中,线路激扰通常只会引起低阶模态共振,因此选择构架前10阶的自由模态作为输入(本文不涉及模态数目的讨论).
表1 自由模态各阶主频
由于应变的张量属性,理论上讲每一节点有6个方向的自由度,即需要计算6个方向的应变模态矩阵,但在实际布置传感器的过程中,受限于结构几何特征,很难保证所有自由度都布置应变片.所以为了消除方向的影响,本文选择Von-Mises应变作为应变模态矩阵输出.
传感器优化的另一项准备工作是预先确定备选自由度数量,即N1.本文选取的原则是通过有限元处理软件Hyperview计算每一阶模态的应变能,设定一个门槛值,选择大应变能测点作为初选测点,最终根据经验选取了1 134个测点.
4.2 模型误差对结果的影响
首先考察Papadimitriou方法[12]中固定相关长度对布置结果的影响.由于试验采用的应变片规格为10 mm,与单元尺寸相同,考虑到传感器备选位置为有限元单元节点,相关长度小于10 mm没有实际意义,因此取值范围为10~30 mm,目标传感器数量选择20个,远大于模态可视化原则要求的10个.按照第3节的步骤逐个添加传感器至目标数量,计算得到Fisher信息阵行列式、MAC最大非对角元和NND指数随相关长度变化的结果,如图2所示.
由图2可见,Fisher阵行列式与MAC阵最大非对角元都是随着相关距离的增大先减小后增大,而NND指数的变化趋势为先增大后减小,三者均在相关距离达到20 mm时出现极值.依照后两个准则来看,相关长度取20 mm时为最优值,然而此时Fisher信息阵行列式却达到了极小值.这是因为在考虑误差的情况下,传感器没有集中在对模态识别贡献最大的区域,所以当传感器平均布置在结构上时,不可避免地会减小行列式的值.从优化的目的来看,在保证传感器均匀配置的前提下,一定程度地减小Fisher信息阵行列式的值是可以接受的.因此,当相关长度为20 mm时可认为取到了最优值.图3为相关长度为20 mm时的传感器配置方案(方案二).其次为了说明模型误差能够减少测点聚集效应,不考虑Σ2,得到的传感器配置方案如图4所示(方案一).
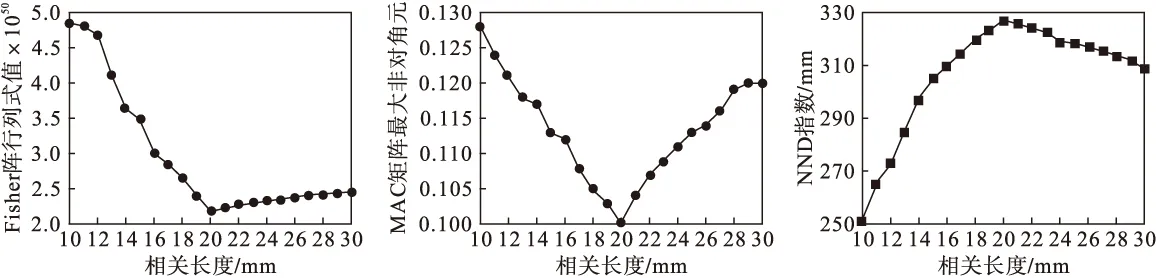
图2 相关长度对评价准则结果的影响(相关长度为常量)
由图3和图4可见,两种方法布置的传感器位置大致相同,均位于列车检修时发现的易出现疲劳失效的结构处,如横侧梁连接部、齿轮箱吊座、横纵梁连接部和一系弹簧与横梁连接部等,说明以模态识别为目标的传感器方案是可行的.然而方案一的测点就会明显出现在强应变响应区聚集的现象,如横侧梁连接部、横纵梁连接部、一系弹簧与横梁连接部和齿轮箱吊座等.对比之下,方案二的测点会更均匀地布置在整个构架上,位置选取具有一定的规律性,即强响应区的对称位置,从而最大程度保证了结构疲劳薄弱部位的全覆盖.
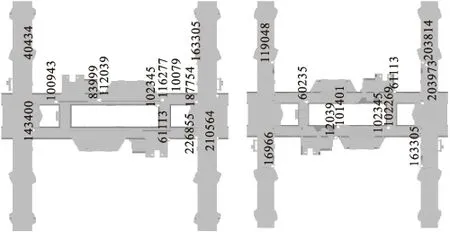
图3 考虑模型误差的传感器配置方案
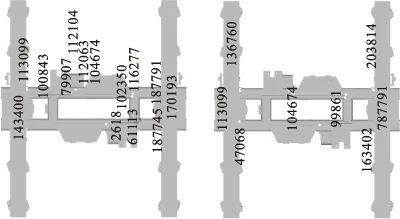
图4 未考虑模型误差的传感器配置方案
进一步定量地对两种方案进行评价,分别将两种方案的结果代入到第3节的评价准则计算公式,得到的结果如表2所示.两种方案的MAC矩阵直方图如图5所示.由计算结果可知,方案一的Fisher矩阵行列式和MAC矩阵最大非对角元大于方案二,而NND指数小于方案二,这是由于方案一的测点均集中在强响应区,包含了最多的模态信息量,但是方案二传感器位置选择更加平均,并且平均分布的传感器识别出的模态向量相互间具有更好的独立性.由此可见,当传感器数目大于识别模态数时,考虑模型误差后的传感器配置结果在保证较大信息量的前提下,可以明显改善聚集效应,保证了结构监测的全面性.
同时也可以看到,考虑模型误差后的配置结果仍存在个别位置冗余现象,例如一系弹簧与横梁连接部,证明了Papadimitriou方法仍无法达到最优的配置结果,存在改进的空间.
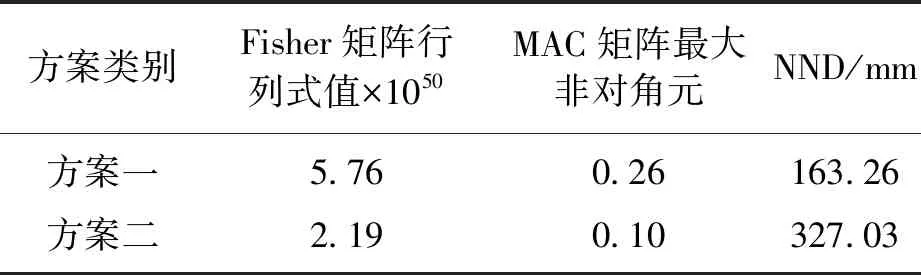
表2 评价准则值
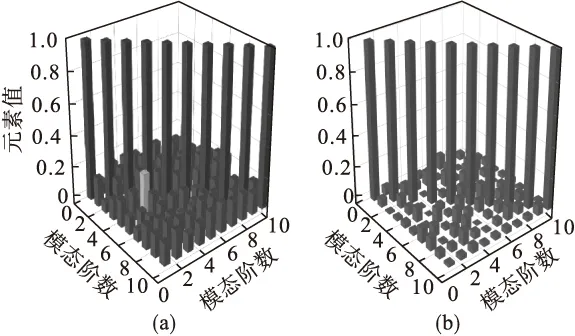
图5 MAC矩阵直方图
4.3 改进的模型误差
为克服相关长度全局固定的缺陷,本文假设相关长度为一变量,测点间的响应越接近,相关长度越大.由于应变响应范围是以某一极大值为圆心,向外逐渐递减,相关性也随之递减,即测点周围存在一个强相关区.备选测点与已选测点间存在距离门槛值,当距离小于门槛值时,相关长度取较大值;当距离大于门槛值时,相关长度取较小值.根据4.2节的计算结果,较小值选择固定相关长度的最优值为20 mm,较大值在此基础上乘以与测点应变响应有关的系数λ,
(14)
式中,MSEmax和MSEmin表示以已选测点为圆心,半径为门槛值的范围内,应变能的最大值和最小值.
由于门槛值的选择仍存在主观性,为探究其对配置结果的影响,假设门槛值在20~100 mm范围内变化,评价准则计算结果如图6所示.
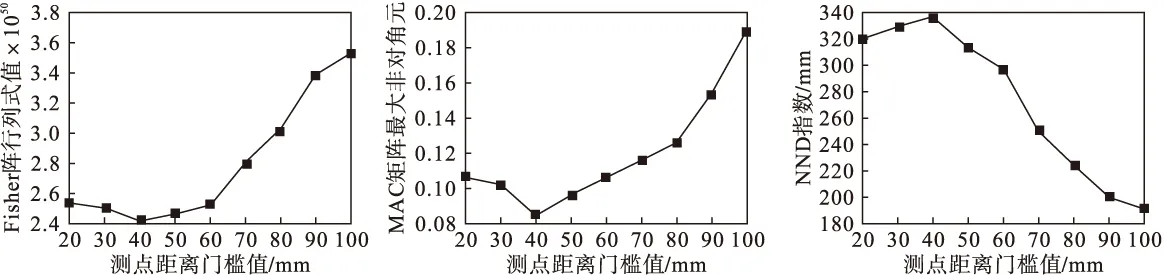
图6 测点距离门槛值对评价准则结果的影响
由图6可见,测点距离门槛值对评价准则的影响同相关长度一样,存在最优值40 mm.Papadimitriou方法与本文方法得到的三种评价准则结果如表3所示.由表3可知,相比Papadimitriou方法,改进的模型误差在进一步提高NND指数和降低MAC矩阵最大非对角元的前提下,明显改善了前者Fisher矩阵行列式值较低的缺点,使测点能够更加均匀地配置在应变强响应区域.
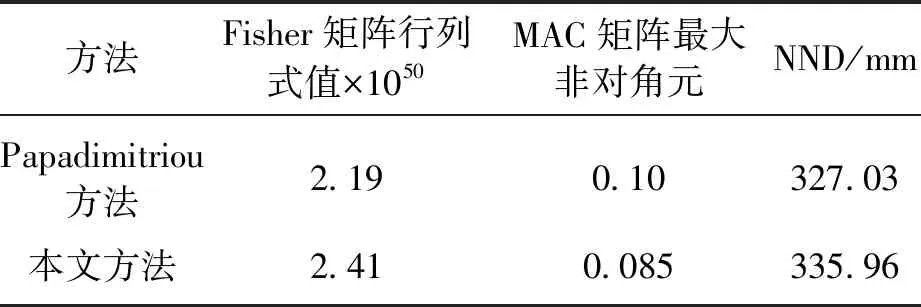
表3 评价准则值
综上所述,在测点门槛值选择40 mm的情况下,采用改进的模型误差会比Papadimitriou方法得到更好的传感器配置结果.最终配置如图7所示,位置说明见表4.

图7 传感器最优配置
5 实例验证
为说明本文方法应用于地铁车辆构架应变传感器配置的有效性,在北京某型地铁构架上按照工程经验大规模布置应变传感器,包含表4所列测点,测点分布如图8所示.
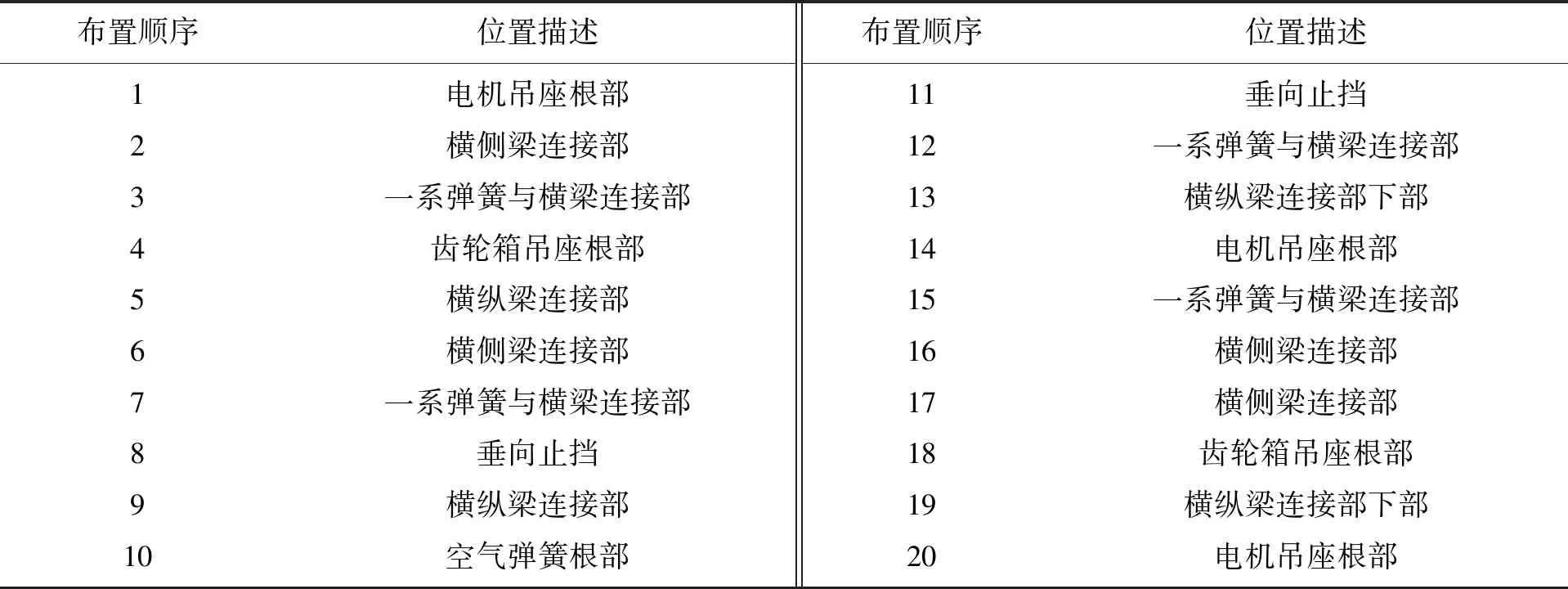
表4 测点选择顺序
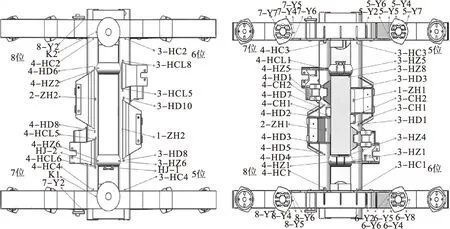
图8 传感器布置图
图中,HD表示电机吊座,HCL表示齿轮箱吊座,HC表示横侧梁连接部,HZ表示横纵梁连接部,Y表示一系弹簧与横梁连接部,K表示空簧座,CH表示垂向止挡.由图8可见,传感器方案存在明显的冗余现象,表明工程经验无法科学指导选点.
将布置好传感器的转向架用于线路跟踪测试,获得运营工况下的传感器实测应变-时间历程.对采集到的数据进行分析,计算其360万公里等效应力,以评估测点的应力水平.等效应力结果如表5所示.同时将测点按照等效应力值由大到小排列,排列顺序见表中序号一栏.
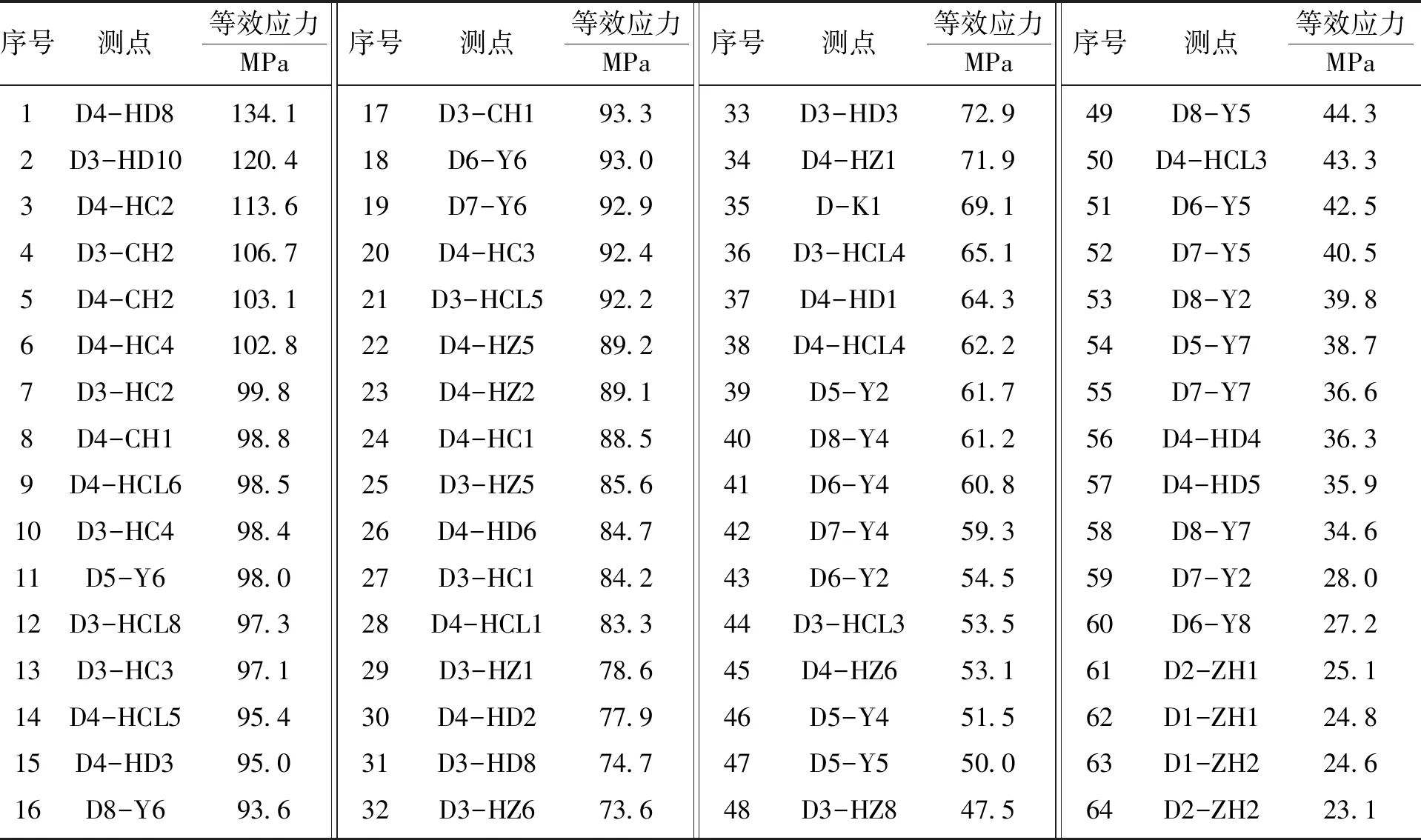
表5 测点等效应力
表5中测点名称代表的位置已在前文进行了说明,对比Papadimitriou方法的测点位置与本文方法的测点位置(表4)描述可知,前者在一系弹簧与横梁连接部存在冗余情况,同时结合图3和图7的仿真测点位置,以及图8的测点位置可以看出:前者在电机吊座和齿轮箱吊座部位仅布置于某一侧横梁上,而实际测试结果表明两侧吊座均存在大应力区,并且横侧梁连接部也选取了位于构架下方的实测应力较小的测点;相比之下,本文方法选取的测点顺序满足实测应力数据反映的大小变化规律,并且在所有疲劳薄弱部位均有覆盖,测点配置具有一定的对称性;同时可以在每个薄弱部位中的多个冗余测点中选出具有较大实测应力的测点,证明了基于改进模型误差的信息熵应变传感器优化方法用于城轨车辆构架应变传感器配置的有效性和优越性.
6 结 论
1) 基于应变模态理论和信息熵,从测量误差和模型误差分析的角度出发,将测点模态应变能作为测量误差的方差,模型误差的协方差表示成测点距离的指数函数,从而解决了传统的传感器优化方法存在的配置冗余、测试信噪比不高的缺点.
2) 城市轨道车辆构架模型算例表明,相较于传统的模态应变能-有效独立法,当考虑模型误差时,NND准则和MAC准则明显优于传统方法, Fisher信息阵行列式准则较接近传统算法,表明考虑模型误差后,在传感器信息量没有显著减少的情况下,传感器聚集效应得到改善,测点布置更加均匀,模态间独立性较高.
3) 考虑测点应变响应与相关性之间的内在联系,将模型误差中的固定参数视为与测点模态应变能有关的变量,提出一种新的模型误差表示方法,三种准则计算结果表明,新方法在测点分布、模态独立性和传感器三个方面均优于固定参数的模型误差.
4)传感器优化结果表明,本文提出的方法可以将传感器布置在跟踪测试中发现的应力较大的部位,为选取传感器测点提供了科学依据,从而达到减少试验成本的目的.
