基于BP神经网络的三轴增稳云台自抗扰控制
2020-04-07,*,
,*,
(1.广西师范大学电子工程学院,广西桂林541004;2.广西师范大学化学与药学学院,广西桂林541004)
将摄影装置安装在增稳云台上可以使镜头保持稳定,利用云台的抵抗外界晃动能力可以有效克服因镜头抖动而造成的图像模糊问题。三轴增稳云台由3个伺服电机和框架组成,这种结构稳定效果出色,在航拍领域应用广泛。增稳云台伺服电机在低速运行时,由于摩擦力的作用会导致系统具有非线性特性,基于误差来消除误差的传统PID控制难以胜任此类系统。自抗扰控制器(active disturbance rejection control,ADRC)不需要系统精确的数学模型,继承了经典PID的优点,同时也克服了PID基于误差来消除误差的固有缺陷,且具有抗扰能力强等优点[1]。但常规自抗扰控制器由于参数众多而导致整定过程耗时费力。有些文献提出使用遗传算法[2]、人群搜索算法[3]、粒子群算法[4]、狼群算法[5]、克隆算法[6]、蚁群算法[7]、鲨鱼优化算法[8]等群体智能优化算法对ADRC进行参数优化,在保持良好的鲁棒性下提高了控制系统的性能。类似于文献[9]使用BP神经网络(back propagation neural network,BPNN)调整PID参数的方式,相关文献使用BPNN调整ADRC参数,试图提高ADRC的自适应性、鲁棒性和抗干扰能力。文献[10-11]对ADRC中的扩张状态观测器进行了深入剖析,引入了自适应扩张状态观测器的概念,并使用BPNN调整扩张状态观测器参数,但未对非线性状态误差反馈的参数进行整定;文献[12]使用了2个BPNN分别调整扩张状态观测器和非线性状态误差反馈的参数,并使用基于带宽概念的单参数化设计方法选择神经网络输出层的增益系数,但这种方法会导致结构变得复杂且神经网络的参数增多。针对BPNN结合ADRC应用于云台控制研究的空白,本文设计单个BPNN与ADRC相结合,使用基于采样步长的方法选择神经网络输出层的增益系数,同时对ADRC中的状态观测器和非线性状态误差反馈的关键参数进行自整定寻优,应用于含Stribeck摩擦模型的三轴云台伺服系统,以期解决ADRC参数整定过程耗时且费力的问题,提高控制精度和增强抗扰能力。
1 三轴增稳云台伺服系统动力学方程
三轴增稳云台具有3个自由度,且3个轴的工作方式基本相同,空间结构上主要由外框、中框、内框组成[13], 用于安装摄影装置的内框的稳定性对拍摄效果的影响最大。假设将云台视为刚体,整个云台的非线性模型方程与单关节机构的模型方程一致[14]。以内框为例建立单关节机构的动力学方程为[15-16]:
(1)
转换为状态方程:
(2)

2 自抗扰控制器简介
ADRC主要由跟踪-微分器(tracking-differentiator,TD)、扩张状态观测器(extended state observe, ESO)、非线性状态误差反馈(nonlinear state error feedback,NLSEF)等3部分构成。图1虚框部分为ADRC结构,ADRC的核心部分是具备扰动观测能力的ESO[18],其三阶离散形式方程为:
(3)

NLSEF比经典线性PID控制效率更高,其方程为:
(4)

3 基于BP神经网络的ADRC设计

图1 BPADRC结构Fig.1 Structural block diagram of BPADRC

(5)
(6)
其中:Ol代表网络输出层的输出;Nl代表网络输出层的输入;wlj为输出层的权重。BPNN输出层的权重wlj的更新算法采用梯度下降法:
(7)

类似地,可以获得隐含层的权重wji的学习算法:
(8)
其中:Oi代表网络输入层输入;Nj代表网络隐含层输入;f′(·)为双曲正切函数的导数;η、α、wlj、δl含义同式(7)。

图2 BP神经网络结构Fig.2 Structure of BP neural network
4 仿真分析
为验证基于BPNN的三轴增稳云台ADRC控制性能的优点,使用PD、ADRC和BPADRC控制在三轴增稳云台伺服系统上分别进行仿真分析。选取PD参数:kp=40,kd=1.2;ADRC参数:h=0.001,δ1=0.002 5,δ2=2h,α1=0.5,α2=0.25,α3=0.75,α4=1.5;BPADRC的参数除β01、β02、β03和β1、β2的初值均取为零外,其余参数均与ADRC参数一致。
给定指令信号为单位阶跃信号,并在t为1 s时加入幅值为10、作用时间为50 ms的矩形波扰动信号。由图3及其局部放大图可见,上升时间:ADRC控制为0.071 s,PD控制为0.082 s,BPADRC控制为0.086 s;超调量:ADRC控制为0.3%,BPADRC控制为0.8%,PD控制为1.6%;扰动作用下误差峰值:PD控制为0.202 rad,ADRC控制为0.102 rad,BPADRC控制为0.030 rad。
由于ADRC提早就安排好了过渡过程,因此可以在保持小超调量的同时提高系统响应的速度。由于网络收敛时间的原因,BPADRC控制在快速性和超调量上略差于ADRC控制,快速性也略微差于PD控制,但超调量要好于PD控制。在扰动作用下,抗扰能力:BPADRC>ADRC>PD,PD控制不具扰动观测补偿的能力,且存在快速性和超调量的矛盾,这些固有缺陷使得PD控制的抗扰能力最差。由图4可见,ADRC的ESO能够观测到t为1 s时添加的扰动信号。
将指令信号改为正弦跟踪信号θd(t)=0.1sin(2πt)。系统以低速运行,在含有摩擦力作用的状况下,误差峰值:ADRC控制为0.018 21 rad,PD控制为0.013 49 rad,BPADRC控制为0.005 22 rad,控制精度:BPADRC>PD>ADRC。从图5可见,PD控制在位置跟踪时出现了“平顶失真”现象,这是由于PD的固
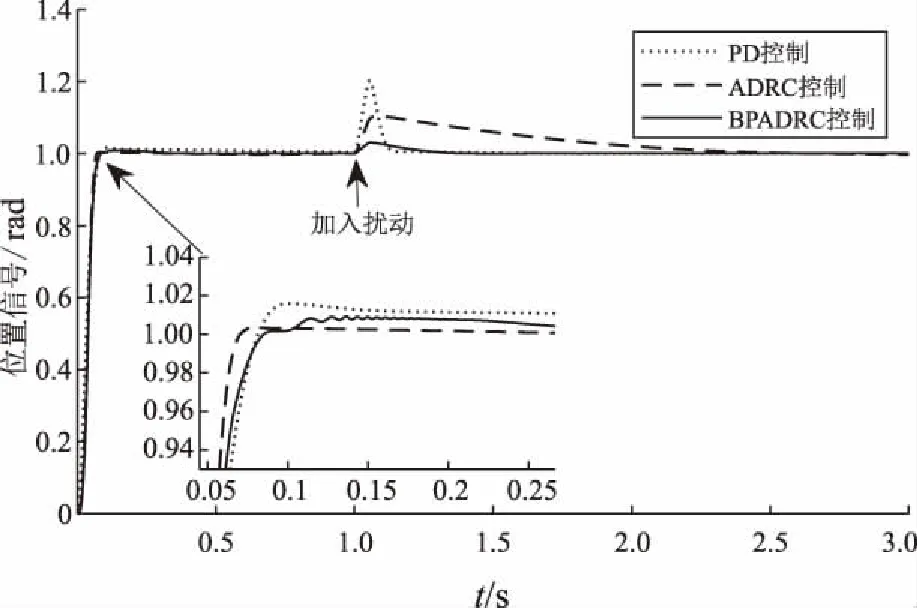
图3 阶跃响应及抗扰性能测试Fig.3 Step response and immunity test
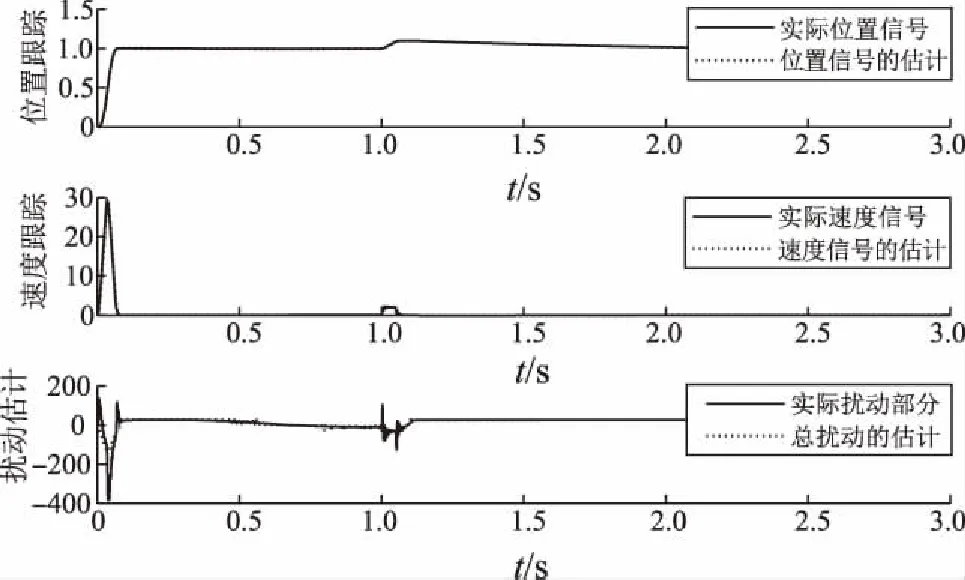
图4 扩张状态观测器的输出Fig.4 Output of extended state observer

图5 PD控制的位置跟踪和误差曲线Fig.5 Position tracking and error curve of PD control

图7 BPADRC控制的位置跟踪和误差曲线Fig.7 Position tracking and error curve of BPADRC control
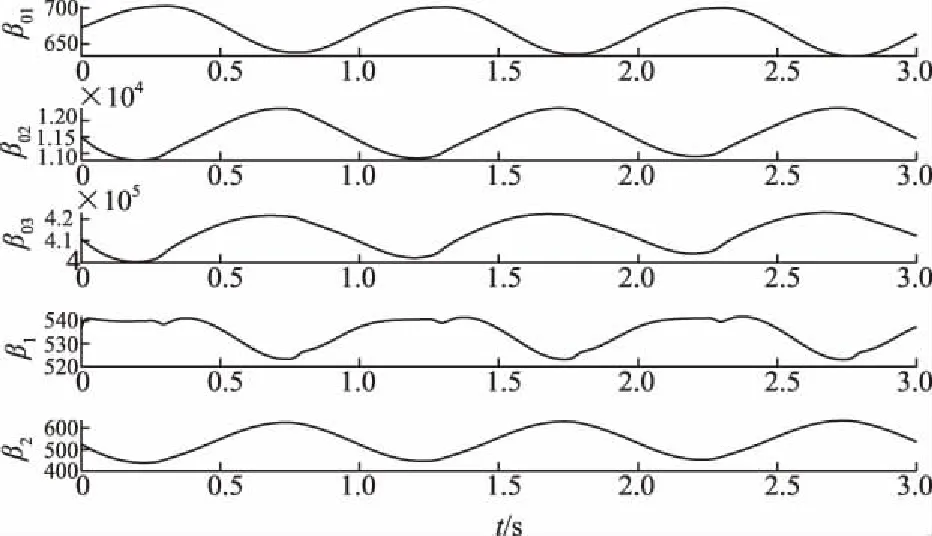
图8 BPADRC的参数自整定曲线Fig.8 Parameter self-tuning curve of BPADRC
有缺陷造成跟踪误差大,难以达到高精度控制要求。从图6可见,ADRC通过ESO对总扰动进行实时估计并加以补偿,虽没有出现“平顶失真”现象,但在实际参数与理想参数差距较大的情况下,ESO对扰动的估计能力下降,扰动补偿过多或不足都会影响控制精度。从图7可见,在BPADRC控制下,由于神经网络能对关键参数自动进行整定寻优,增强了ESO对总扰动的估计能力和自适应性,故提高了控制精度。从图8可知,BPADRC可实现β01、β02、β03和β1、β2等关键参数的自整定寻优。
5 结语
针对三轴增稳云台伺服系统非线性特性,本文将BPNN与ADRC组成复合控制器, 设计使用单个BPNN同时在线自动调整ADRC中的5个关键参数,解决了ADRC参数调整过程耗时且费力的问题。通过仿真实验数据对比,BPADRC相比PD控制和参数固定的ADRC控制具有更高的控制精度和更强的抗扰能力,对提高增稳云台的性能具有较好的应用价值。由于神经网络的收敛性会影响到控制效果,所以设法加快网络收敛速度是需要进一步解决的问题。
