基于改进的Adaboost和LBP危险物品检测算法研究
2020-04-02牛道鸿马晓东吴雪冰
牛道鸿,马晓东,吴雪冰,王 芳,2
(1.河南师范大学电子与电气工程学院,河南 新乡 453007; 2.河南省光电传感集成应用重点实验室,河南 新乡 453007)
0 引 言
现代社会人们对安全的要求越来越高。如今视频监控系统[1-3]以及可以拍摄视频的机器人[4-6]越来越多,可以通过它们来对环境的安全情况进行监控。在监控时重点是对一些有安全隐患的危险物品进行检测。目前用于物体检测的方法有:边缘检测法[7-9]以及基于机器学习[10-11]的方法。其中基于机器学习的方法有:类哈尔特征(Haar Like)[12-14]、局部二值模式(Local Binary Patterns)[15-18]、方向梯度直方图(Histogram of Oriented Gradient, HOG)[18-19]。边缘检测的方法实时性好,但是受亮度、光照影响大,同时需要对图像进行较为复杂的处理。基于机器学习的方法识别准确,鲁棒性好,但采用Haar特征进行物体检测算法复杂需要时间较长,而HOG对噪声敏感并且实时性较差。近年来,国内外学者对Adaboost[20-21]算法进行改进,实现了对车辆以及车牌的检测,但是对实际环境下危险物品检测的研究进行得较少。
本文正是考虑到实际情况中危险物检测环境因素影响正确率下降的情况,同时为了更好地加快识别速度,提出了一种新型危险物品的快速识别算法。该算法对Adaboost算法进行改进,在训练过程中将正样本通过颜色进一步分类提高级联分类器的效率,同时采用改进的LBP进行特征值提取提升算法速度与准确性。本文以家用煤气瓶作为研究对象进行了算法的实验与验证。
1 改进的Adaboost算法
1.1 Adaboost算法
Adaboost算法是一种迭代算法,针对一个训练集训练出不同的弱分类器,再把这些弱分类器集合起来形成一个最终的级联分类器。相比较来说,弱分类器可以用来区分物体相差比较大的情况。随着弱分类器数目的增加,形成强的级联分类器可以用来区分与目标相近的物体。但是对于一些目标物体颜色与周围环境相近以及光照、亮度变化等情况,会造成训练过程中有效率下降的情况。
1.2 改进的分类器
对于光照与亮度等影响的情况,在级联训练器中引入HSV[22](Hue, Saturation, Value)颜色空间加强级联器的训练效果。该颜色模型在目标检测过程中具有较好的鲁棒性。HSV颜色模型中的参数指色调(H)、色彩饱和度(S)与明度(V)。

(a) 亮度1

(b) 亮度2
相较于其他颜色模型,HSV颜色模型受光照影响因素小,可以简化对目标的检测。在该颜色空间中,H、S、V这3个参数信息相互独立,并且H可以很好地区分颜色变化而对光照强度不敏感。图1给出了同一图像不同亮度下的HSV颜色空间的H通道直方图。从图中可以观察到在该颜色空间下受光照亮度的影响小。
根据以上条件,构造新的级联分类器过程如图2所示。通过改进分类器的方法实现对算法的改进。首先将正样本和负样本进行训练,得到一个可以区分周围差别较大情况的分类器C1。接着再对正样本进行颜色分类,将其再作为新的正样本与负样本进行训练构成分类器C2,与之前构造的分类器C1一起构成一个加强的级联分类器C3。这个分类器可以在前级将物体从与周围差别大的环境下检测出,在分类器的后级可以更加精确地将危险物从环境相近以及光照亮度变化大的情况下检测出来。
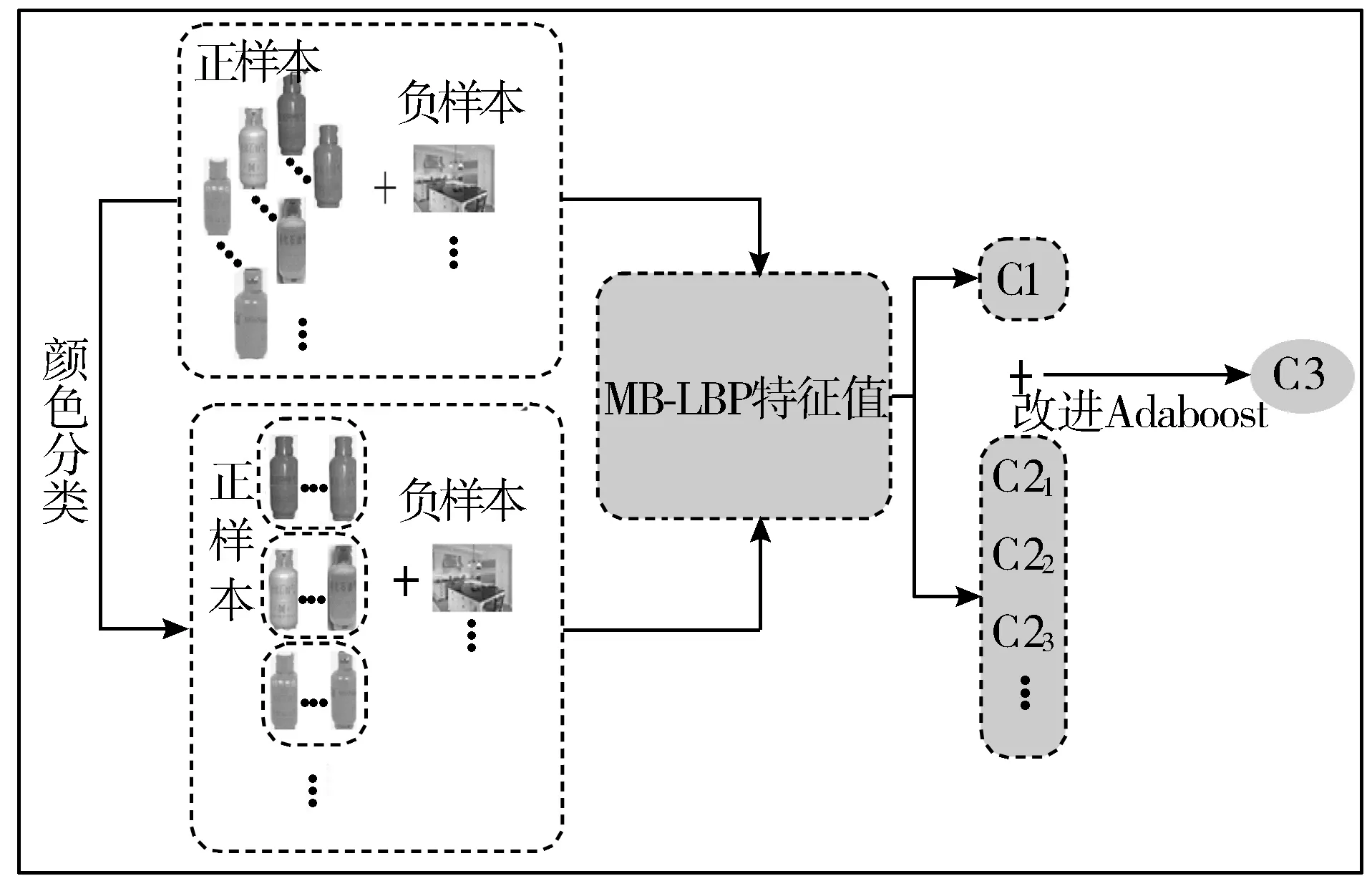
图2 改进的级联分类器
2 改进的特征值提取方法
2.1 LBP特征值
局部二值模式(Local Binary Patterns, LBP)是一种用来描述图像局部纹理特征的算子,常用其实现对物体的识别。LBP算法最早用作描述图像的纹理,LBP算法的基本思想是比较图像内每一点像素以及其邻域内像素的关系,由像素点之间的关系分析出图像的特征。
LBP中的特征值计算公式为:
(1)
式(1)中,gc表示中心像素的灰度值,gp代表p个临近区域内的像素值。LBP先对每个像素gc的临近区域采样,每个采样点gp与中心像素做灰度值二值运算S(gp-gc),对每个采样点赋予不同的权值系数2p,得到gc对应的LBP值(LBP)为:
(2)
除此之外为了保证提取特征值的稳定性,适应不同尺度的纹理特征的提取,具有旋转不变性的圆形LBP应用更广泛。2种LBP运算过程如图3所示。

(a) 原始LBP运算过程

(b) 圆形LBP运算过程
2.2 改进的LBP算法
为了更好地提取待检测物体的特征值,降低周围环境的干扰,本文决定采用MB-LBP(Multi-Block Local Binary Pattern)进行特征值的提取。MB-LBP是对图像从全局到局部的描述。该方法不再基于单个像素,而是将特征计算扩展到任意大小的子块区域。子块区域的大小决定捕获的特征结构的大小。该方法得到了不同尺度的描述特征,并对特征描述进行了增强。利用子块区域的平均灰度计算特征值,提高了像素与像素之间的相关性,从而减小了噪声对特征计算的干扰。改进LBP的计算过程如图4所示。

图4 改进LBP计算过程
具体MB-LBP的计算过程如下:
1)将样本图像进行分块,将得到的分块区域再分成3×3块。
2)将分块后的区域再次划分为3×3块区域,区域的位置用(s,t)表示。
3)其中某一小块的平均值由公式(3)、公式(4)可以求得:
(3)
(4)
4)图像的MB-LBP值可由公式(5)求得:
(5)
通过上述过程完成对危险物图像的LBP特征值的提取。如图5所示,得到提取LBP特征值的图像与LBP特征直方图。将得到的LBP特征值经过级联分类器训练即可用来进行危险物品的检测。

(a) LBP特征图像

(b) LBP直方图
3 实验与结果分析
为了测试该算法的性能,本文选取煤气瓶为危险物检测目标。具体实验流程如图6所示。

图6 算法实现过程
本次实验搜集到的正样本主要包含有蓝色与灰色的煤气瓶,负样本主要场景是厨房。选择日常生活中厨房图片作为测试样本。为了减少训练时间,将其大小统一设置为40×80像素作为训练样本。部分训练正样本与负样本如图7所示。

图7 部分正负样本
本文实验采用VS2017以及OpenCV3.4.1[23-24]作为软件测试平台,硬件测试平台为Intel(R) Core(TM)i5-6200的CPU,4 GB内存以及640×480P摄像头。
训练需要设置接受率。同样数量的正负样本,且图像所含内容相同的情况下不同算法所需要的训练时间如表1所示,其中训练的层数为15层。由表1可以得到本文提出的算法训练时间短,应用中具有实用性。

表1 不同算法的训练时间 单位:s
为了验证该算法的检测性能,本文采用正确率(DR)、误检率(FR)、训练样本时间以及平均处理时间作为评价标准。其中正确率与误检率的计算公式为:
(6)
其中,AP表示正确识别的个数,FN表示未识别个数,FP表示误识别个数。
通过将待检测物体放置于不同的光照强度下,不同算法对物体进行识别的正确率如图8所示。其中所给定的照度值选取高度为0.75 m的水平面。
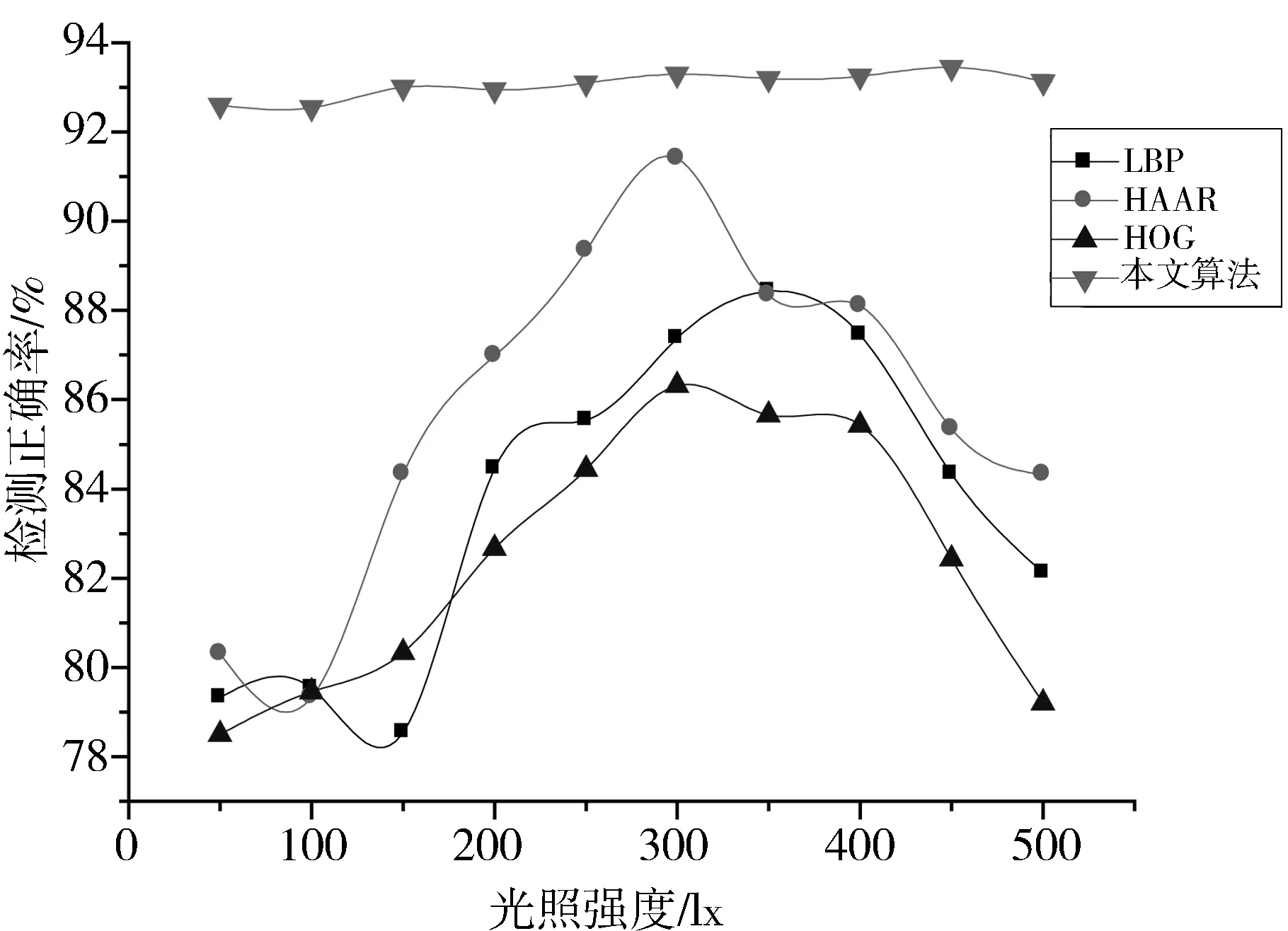
图8 不同算法下光照强度与检测正确率关系
在光照条件为300 lx的情况下各类算法性能比较如表2所示。
表2 危险物品(煤气瓶)检测测试结果

方法DR/%FR/%平均处理时间/msLBP87.372.91105.59Haar91.402.83120.34HOG86.325.02108.56本文算法93.292.70106.42
表2的结果表明,在相同光照条件下相比其他算法本文算法提高了正确率,降低了误检率。识别每幅图像耗时为106.42 ms,可以快速实时识别出危险物品。
通过以上方法正确检测煤气瓶的示例如图9所示,方框标注的物体代表成功进行识别。说明该算法可以快速准确地在一些受光照影响的环境中实现危险物体的检测,同时在周围环境相近的情况下也可以进行准确检测。

图9 正确检测危险物
4 具体应用
该算法为大学生创新创业训练项目——家庭服务及救援机器人在应用过程中遇到的问题提供了一种解决方案。以上对于危险物品检测提供的算法,速度快、正确率高,便于进行平台间的移植。将训练好的危险物模型传入识别机器人工作系统,机器人在日常检测危险物状况,当有发现异常情况或发生危险时,机器人可以及时发出求救信号或采取措施减少危害,机器人工作流程如图10所示。在检测过程中,将训练好的模型传入计算机,通过机器人摄像头收集图像传入主控系统,主控系统将信息传入计算机进行比对,比对完成后计算机向机器人主控系统发出指令,操纵机械臂采取相应措施或发出救援信号。

图10 家庭服务及救援类机器人工作流程图
5 结束语
本文从光照亮度影响以及周围颜色相近的情况下危险物检测正确率下降出发,提出了一种改进的检测算法。该算法采取颜色分类对级联分类器加强的方法,提高训练过程中的效率,再根据改进的LBP特征提取方法进行特征值提取,从而实现对危险物品的检测。相比于其他传统的方法,该算法将识别正确率提高了2个百分点,达到93.29%。在识别过程中处理耗时短,具有实时性。若增加训练样本的数量,可以达到更好的检测效果。该算法为危险物检测提供了一种新的方案,同时可以进行平台间的移植,为家庭服务以及救援类机器人增加一项准确识别危险物品的新功能,便于在发生危险情况时准确及时地采取措施。
