基于近景摄影测量技术的基坑监测研究
2020-03-31宗爱华王连松
宗爱华 王连松
摘 要:相对于传统监测方法,近景摄影测量技术具有瞬间获取被测物体的几何及物理信息,外业工作较少等优点。但由于专用量测摄影机价格昂贵且操作复杂,制约了近景摄影测量技术的发展与应用。本文将研究普通数码相机在边坡监测上的应用,结合实际工程,通过GPS采集的少量点作为控制点来解算大量未知点的坐标,具有很好的现实意义。
关键词:近景摄影测量 基坑 位移监测 GPS
Abstract: Compared with the traditional monitoring methods, close range photogrammetry has the advantages of instantaneous acquisition of geometric and physical information of the measured object, and less field work. However, the development and application of close range photogrammetry technology are restricted due to the high price and complex operation of special measuring camera. This paper will study the application of ordinary digital camera in slope monitoring. Combined with practical engineering, a small number of points collected by GPS are used as control points to calculate the coordinates of a large number of unknown points, which has a good practical significance.
Key Words: Close range photogrammetry; Foundation pit; Displacement monitoring; GPS
摄影测量是一门利用光学摄影机拍摄像片,根据像片影像来确定被测物体的位置、大小、形状和相互关系的科学技术。依据测量目的通常划分为两类:地形摄影测量和非地形摄影测量。其中,非地形摄影测量指的是应用在工业测量和工程测量中的摄影测量。而近景摄影测量指的是测量距离在300m以内,拍摄地点处在物体周边的摄影测量。其中将以数字相机为图像采集传感器,并对所摄图像进行数字处理的近景摄影测量称为数字近景摄影测量。目前,该技术已经在包括生物医学、工业和建筑学等在内的众多基础研究和应用研究领域得到不错的发展。
1 近景摄影测量外业
本次工程实例选择了北京某地块基坑工程,位于北京市朝阳区,该项目为超高层住宅楼工程。本次监测的主要硬件主要有:尼康数码相机,南方GPS监测仪,标志点塑料板,其中标志点模板主要有两种,一种是20cm×30cm×5mm长方形板,一種是25cm×25cm×5mm正方形板。标志点固定在坡面上的方法是中心和4个角上分别都钉入一个钉子,保证标志物的稳定性。
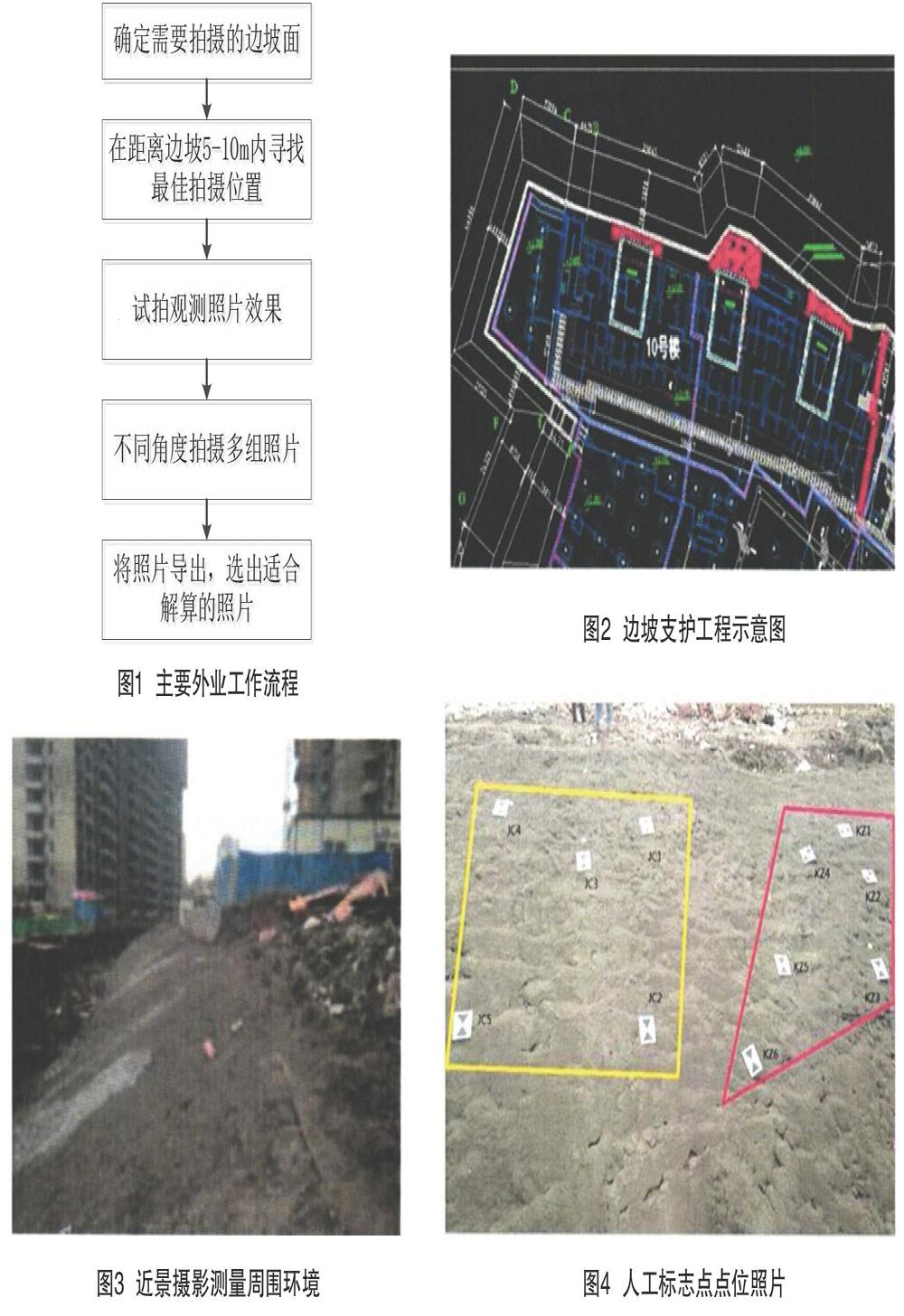
本次项目采用数码相机的主要外业工作流程如图1所示。
首先,确定摄影边坡面。该基坑工程挖深为4.9~7.95m,属于“坑中坑”工程,如图2所示。即基坑内坑部分有混凝土钻孔灌注桩和冠梁,外侧边坡为自然放坡,按照《建筑地基基础设计规范》和《建筑基坑支护技术规范》,该基坑工程为二级。
根据现场要求,在采用传统监测方法的同时,我们对基坑东北方部分放坡工程采用了近景摄影测量方法,监测部位的周围环境图如图3所示。
按照上述设计方法,人工标记物的放置应合理,既不致密也不稀疏,以满足我们摄影的要求,并且根据DLT算法的原理,不应放置标记物在同一平面上。
根据现场的实际情况和传统长期监测的结果,一旦放置了标记,就可以知道在分布图的右侧,由于良好的地质条件,周围没有房屋。这些标记的底部没有建筑物。现浇混凝土桩保留土体并配备冠梁,在施工过程中,边坡位移在短时间内很小,可以忽略不计。因此,在右侧,我们将选择最右边的6个点作为控制点。在左侧,由于照片重叠,我们只需要测量点的坐标并使用GPS进行测量即可。
GPS测量点有很多空间数据方法。在此监视中,CORS用于测量点数据。在整个摄影测量过程中,GPS-CORS仅用于测量控制点的坐标并在以后进行比较,这是一种辅助方法。所以在这里,我将不作详细介绍。
测量控制点的坐标后,请在现场拍照。因为设计平面很大,并且如果只拍摄一张正面照片,则标记点将显得太小,这不利于我们提取特征点和后续操作,因此我们选择拍摄两个照片,左边一张,左边一张(根据DLT计算原理,要计算系数需要两张照片。这里提到的照片是计算出的两张照片),左边两张照片匹配程度确保后期的顺利处理。
2 内业解算
拍摄完照片以后,一次监测的外业就此结束,下面将进行近景摄影测量内业处理。
我们选取拍摄照片中清晰度最高,效果最好的一组照片进行内业解算。按照本次工程实例的解算步骤,我们选择从已知控制点坐标最多的右侧开始进行解析计算,首先,选取右侧A时点一组照片中的一张,如图4所示。
图中,将人工标志点分为两类,一类是已知点,即控制点,用KZ表示;一类是未知点,即监测点,用JC表示。在照片中的各人工标志点位情况如图4所示。
(1)选取特征点。
为保证近景摄影测量的高精度,第一步应进行特征点的选取。首先,需要将拍摄的彩色照片转变成灰色,用编写的单一灰度程序对所拍摄照片进行灰度处理,灰度波段可以选择1、2、3,依次代表红波段、绿波段、蓝波段。
照片上的每个像素仅对一种颜色进行采样,得到的图像称为灰度图。灰度图像只显示白色、黑色及从白色至黑色的每种级别的中间灰度,如白色(255,255,255),中间灰度(10,10,10)、(150,150,150)、(200,200,200)......和黑色(0,0,0),灰度图像与黑白图像不同,在黑白图像中只有两种取值,即黑色(0,0,0)和白色(255,255,255)两种颜色。
灰度预处理分析后,我们分别选择单一灰度模式下的1波段(红波段)、2波段(绿波段)、3波段(蓝波段)进行处理,得到三组波段灰度图。
经过对以上的灰度图像对比分析,可以看出,红被段处理后,标志物在照片中最为突出,相对于绿波段和蓝波段两种灰度处理,其对提取特征点最为方便,所以,在后续工作中,我们将选择红波段对所有照片进行衷度处理。灰度处理以后,我们将对得到的灰度图像进行特征点的选取,在特征点选取中,采用Forstner箅子运算。
(2)数据导入及计算。
在得到特征点效果图以后,将进行照片的解析处理,解算像点的空间坐标把最佳特征点效果图导入至点位计算界面中,解析计算出10个监测点的空间坐标。在B時点我们选择了同样的方法对该基坑边坡进行了监测,处理过程和A时点的方法一样,在这里就不再赘述。
3 位移计算
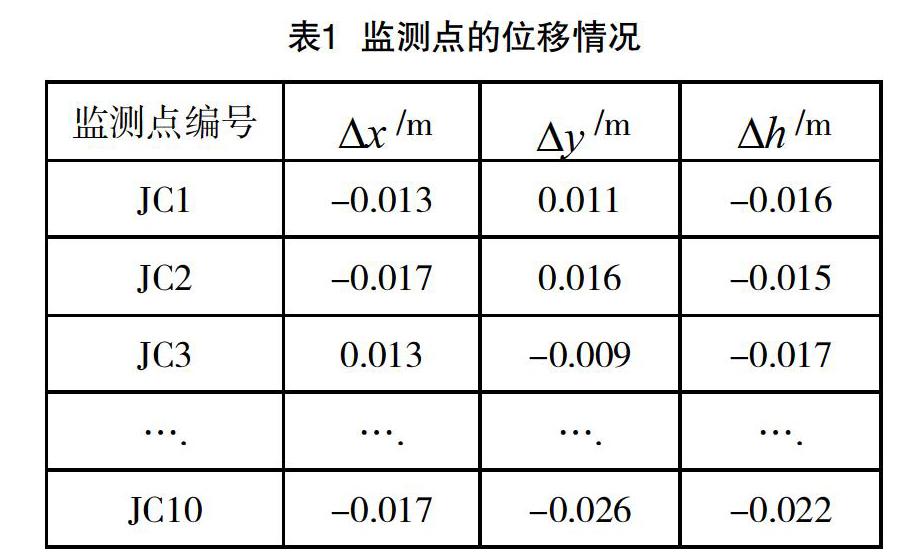
根据A、B两个时点的监测点的空间坐标,解析处理可得到在这段时期内监测点的位移情况如表1所示。
由表1中可以看出,右侧点JCl~JC5位移相对较小,主要原因是右侧测量点处靠近冠梁和混凝土灌注桩,边坡相对稳定;而左侧部位为自然放坡,放坡的高差较大,位移相对较大。考虑到精度,由《建筑边坡工程技术规范》可得,二级基坑在施工期,相对于工作基点的外部变形监测精度,平面是±3~5mm,高程是±5mm,右侧点位计算精度高,左侧精度采用右侧解算坐标为控制点,精度稍低。
此次基坑监测采用的控制点坐标选取了基坑边坡坡上的点位,基坑上的控制点坐标是会随着基坑边坡的变形而发生变化的,为此,在每次使用近景摄影测量方法解算其余点位坐标之前,还需测得控制点坐标。若能拾取稳定的控制点,对于我们的外业工作将得到有效的减少,若我们能够拾取控制点1~控制点6的空间坐标,对基坑的监测会有不错的效果。本次监测项目由于实际情况,不能进入相关楼层测量控制点坐标,并没有采用此方法。但是该方法对有边坡外控制点的近景摄影测量监测不失为一种有效简单的方法,其只需在项目初采用传统测量方法测算一次控制点坐标,之后的外业只需拍摄照片,同时,测量精度也能得到更好的提高。
参考文献
[1] 侯刚栋,部晨光.数字近景摄影测量在文物考古领域中的应用[J].测绘技术装备,2019(12):12-17.
[2] 袁家明.基于车载近景摄影测量的道路交通标线信息自动提取方法研究[D].南京:南京师范大学,2019.
[3] 杨松勇.近景摄影测量技术在露天矿边坡变形监测中的研究[D].赣州:江西理工大学,2019.
[4] 丁影.平面约束的近景影像绝对定向方法及其精度[J].测绘科学,2020,45(3):74-80.
[5] 陈嘉颖.基于近景摄影测量技术的沥青路面纹理实时识别系统[J].东南大学学报:自然科学版,2019,49(5):973-980.
[6] 杨冬.一种针对近景摄影测量的相机标定方法[J].经纬天地,2019(3):79-84.
