基于GPS信噪比观测值的水位反演研究
2020-03-31程文
程文
(中冶集团武汉勘察研究院有限公司,湖北 武汉 430080)
0 引 言
GPS-R技术,是利用原本干扰定位的海平面反射的导航卫星伪随机测距码信息或者载波信号(L1或L2),提取海平面反射面的特征,实现对海浪、潮汐等参数的遥感与监测.
GPS-R技术中的基于信噪比(SNR)的海面测高方法,可以直接使用已有的普通接收机和单个天线来同时接收直射信号和反射信号,不需要对原有接收机和天线进行改装,实际操作更为简便.
从1993年第一次提出利用海面反射的GPS信号测高(PARIS)概念至今,反射信号的应用研究已经有了几十年的时间.使用由反射表面反射的卫星反射信号来实现目标监测和反演的应用,在国内外测绘、农业、林业、海洋学、大气科学等诸多行业内得到了推广[1-12].一些早期的概念、实验和假设逐渐开始引起人们对GNSS反射信号的研究兴趣,由于利用全球卫星导航系统(GNSS)不仅可以全天候进行观测而且省时省力、成本低、精度高,所以美国,意大利,日本,西班牙,英国和澳大利亚等国家纷纷展开了对GPS-R技术的研究.
我国学者对GPS-R领域的研究比国外的一些高校、研究机构要晚.但我国的研究发展速度迅猛,许多高校、研究机构对该领域进行了不同程度的研究,我国学者先后利用GPS-R技术对土壤湿度、植被生物量、积雪厚度、水位变化进行了研究,并取得了一定的研究成果.随着中国北斗卫星导航系统BDS的建成和完善,中国也在这一领域也开始发挥主导作用[1-6].
利用GPS-R技术反演水位变化研究时很多学者用到了美国华盛顿Friday港湾的SC02站,并对此站数据进行分析,得到了很好的成果[3,5,9].为了推广此技术的应用,我们此次选择了位于美国洛杉矶Cameron港湾的Calcasieu Pass GPS站.它起初安装时采用的是双频载波相位的Trimble NetRS型号GPS接收器,到2014年10月时原接收器被Trimble NETR9型号的接收器取代,新接收器可以同时接收GPS和GOLNASS信号.
1 GPS SNR反演水位变化原理
图1是利用信噪比(SNR)法探测水位变化的示意图,从图中可以看出GPS接收机同时接收导航卫星直接信号Ad和海水面反射信号Am.h表示天线相位中心到瞬时海水面的距离,也称垂直反射距离;θ表示直射信号与海水面之间的角度,Ad表示直射信号振幅强度,Am表示瞬时海水面反射信号振幅强度.
由于复合信号中直射信号占主导,为突显经海平面发射后的反射信号的影响,可使用低阶多项式去除信噪比趋势项Ad,余下的SNR残差系列可表示为δ(SNR).

图1 SNR法探测水位变化的示意图
SNR与信号振幅有以下关系[5]:

(1)
式中,Ac为Ad和Am组成的合成信号的振幅,可以看出Ac与Ad和Am及其夹角的余弦值有关.
图1中Am可表示为[7-9]
(2)
式中:E为卫星高度角;γ为载波波长;φ为反射信号振幅的相位值,若计:
t=sinE,
则式(2)可简化为标准的余弦函数,表达式为
Am=Acos(2πft+φ).
(3)
从式中可以看出f包含了h,γ等信息.由于sinE为非等间隔采样,致使SNR残差序列无法保证整周期截断,因此可采用Lomb-Scargle(L-S)谱分析方法解决快速傅里叶变换无法解决的非等间隔采样问题[11].
由此通过f可获取天线相位中心至瞬时潮位面的垂直反射距离h.
2 测站介绍
Calcasieu Pass GPS站位于美国洛杉矶Cameron港湾(29°46.1′N,93°20.6′W),简称CALC站.本文选取该站2019年1月份及2017年全年GPS数据,实际潮位数据使用离此站约200 m处的验潮站数据.
Calcasieu Pass GPS站站址及周围环境如图2所示.
3 实验分析
将CALC站获取的(.d)格式的文件转换为(.o)格式的文件,然后提取SNR数据,获得SNR文件.使用MATLAB编写程序进行运算,结合该站实际情况,选取合适的方位角和高度角,解算得到振幅值、观测卫星数量、反演高度等信息,根据解算的信息绘制出相应的时间序列图像.
然后使用MATLAB读取验潮站的潮位信息,绘制出潮位变化时间序列图.将潮位变化图与反演水位变化图进行对比,进行相关性分析.
3.1 高度角选取
图3(a)、(b)分别为接收机高度为10 m和15 m时CALC站周围的菲涅耳区域图,可以看出当高度角为5°、接收机高为10 m时,所接收到的反射信号中最远距离可达200 m左右;当高度角为5°、接收机高度为15 m时,所能接收的最远信号是来自周围250 m左右的信号.同时当反射器高度固定时,若高度角的范围小于10°,反射区域会扩大反射信号,从而将会收到很多来自外界的影响;若高度角的范围大于10°,反射范围随高度角变大而缩小,达到40°时,反射信号已经相对较差,无分析的意义.
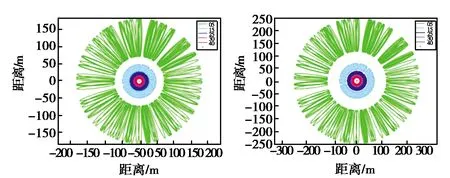
(a)10 m (b)15 m
根据以上菲涅耳反射区域图反映的情况,在此次实验中选取的接收机GPS卫星信号高度角为10°~40°.
3.2 方位角选取
当我们以40°为分界点绘制不同方位角信噪比数据的频谱图时,多数年积日中320°~360°和0°~40°内接收不到任何信号,所以选取方位角为40°~320°.
以任意年积日如第4年积日为例,通过对直接信号和反射信号进行分析,得到不同方位角SNR数据的频谱图,如图4所示.
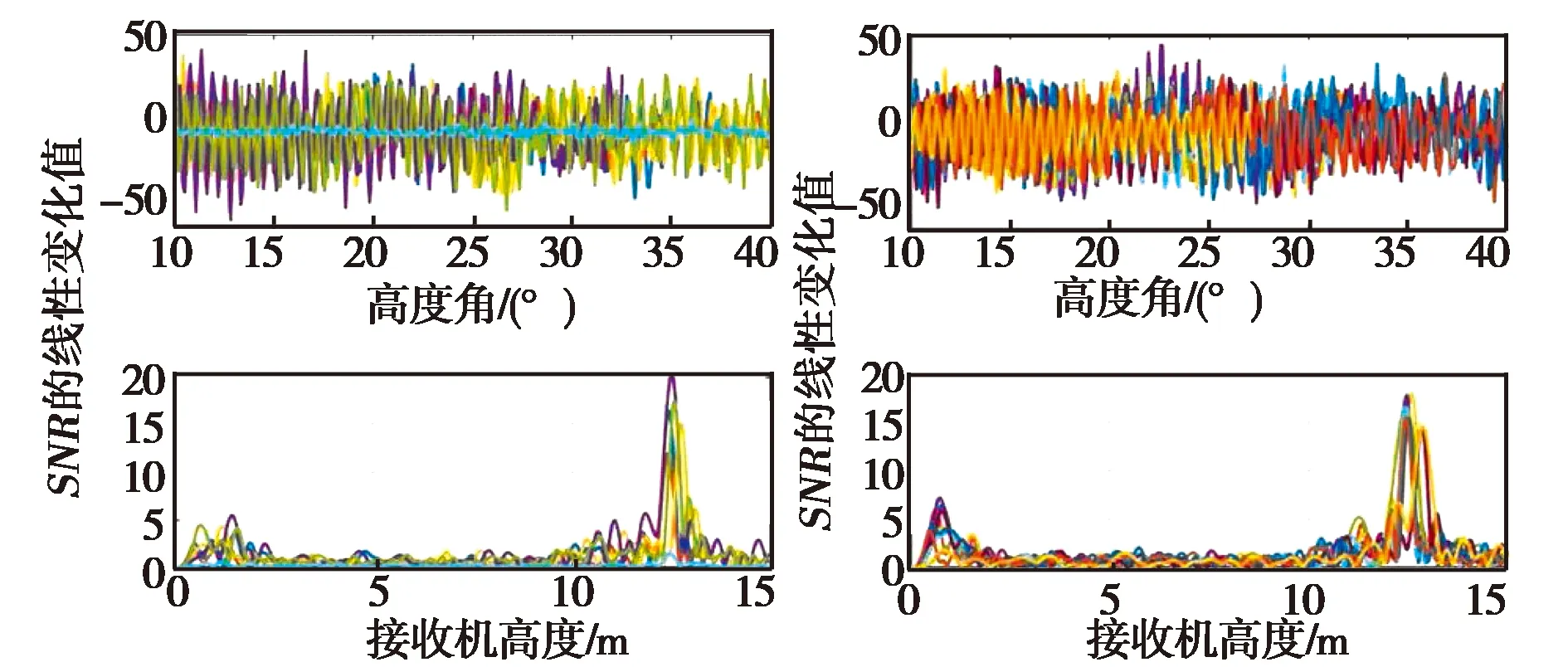
(a)120°~160° (b)160°~200°

(c)200°~240° (d)240°~280°
图4中所采用的卫星是1~32号所有GPS卫星,每张小图都由上下两部分组成,上半部分横坐标是高度角的范围,纵坐标是SNR的线性变化值(volts/volts);下半部分中横坐标是接收机高度,纵坐标是SNR的线性变化值(volts/volts).由图4可以看出在所选的高度角内卫星接收到的信号有较强的连续性,不同的卫星在同一个方位角范围内的频谱图都有较强的一致性.
3.3 SNR变化图
以任意一颗GPS卫星在任意两个年积日为例,选取同一颗卫星在不同年积日的数据进行分析,绘制SNR值及其残差随高度角的变化图.图5为第16号卫星在第1和第31年积日的数据.

(a)第1年积日 (b)第一年积日去趋势后
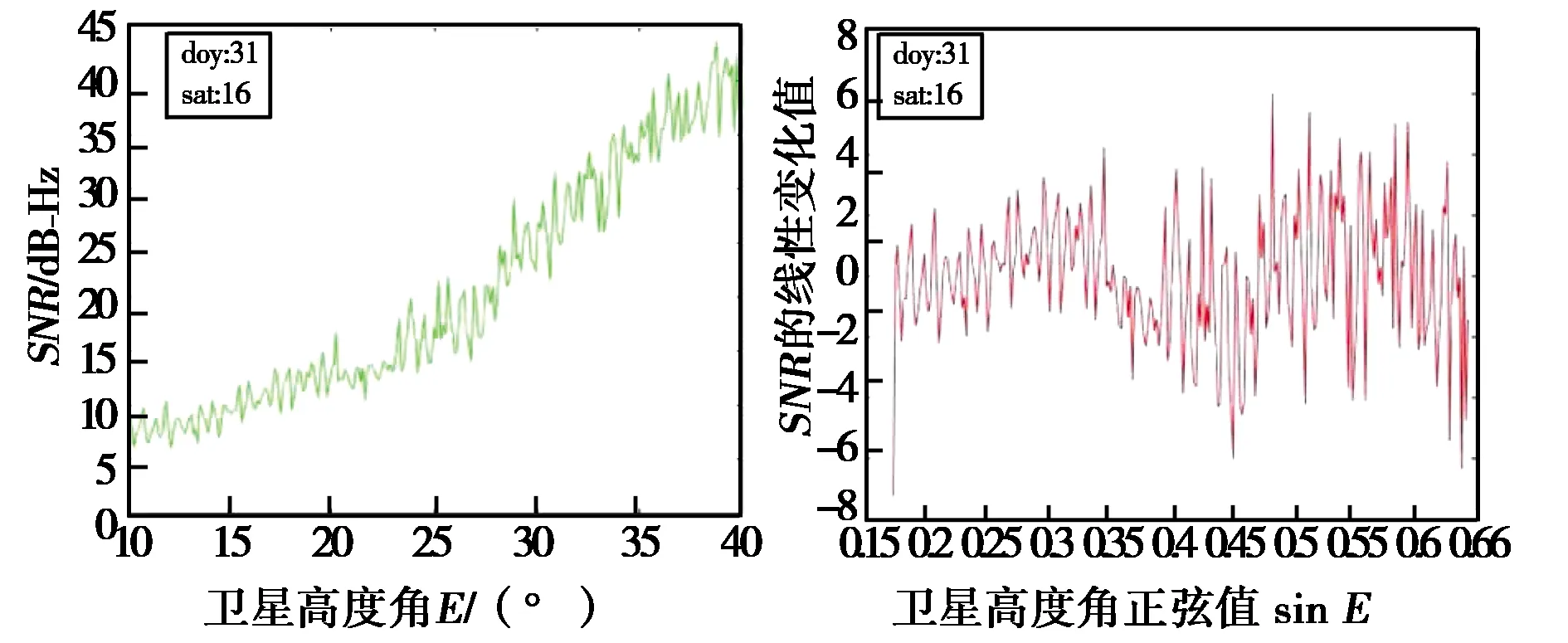
(c)第31年积日 (d)第31年积日去趋势后
图5(a)是在第1年积日时SNR随高度角变化的示意图,图5(b)是对图5(a)去趋势后的SNR残差序列图.图5(c)是在第31年积日时SNR随高度角变化的示意图,图5(d)是对图5(c)去趋势后的残差序列图.图5(a)和图5(c)中横坐标为所选取卫星高度角E,纵坐标为SNR(dB-Hz).图5(b)和图5(d)中横坐标为高度角的正弦值sin E,纵坐标为SNR的线性变化值(volts/volts).
图5中SNR的变化主要为低高度角的多路径影响所致,进而为利用多路径信号反演地表参数提供了重要的数据输入[5].
3.4 L-S频谱分析
以任意一颗GPS卫星在任意年积日为例,选取同一颗卫星在不同年积日的数据,根据滤除直接信号分量后所获取的SNR重构序列,进行L-S频谱分析后反演得到海平面高度.图6为第8号GPS卫星在第4、第16、第22和第31年积日的数据.

(a)第4个年积日 (b)第16个年积日
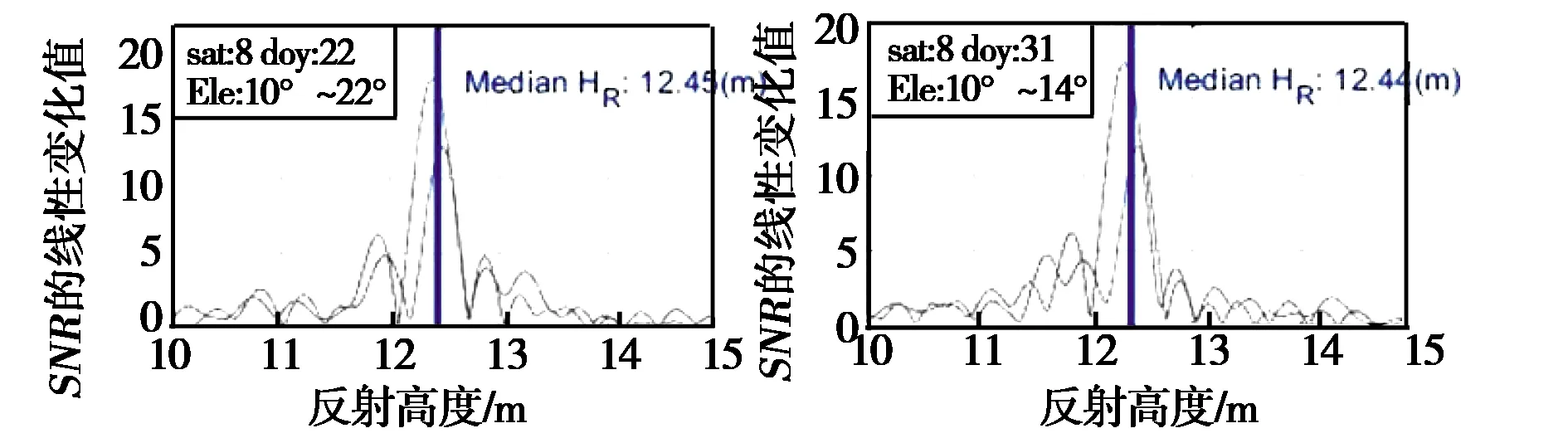
(c)第22个年积日 (d)第31个年积日
图6所示的是对第8号GPS卫星进行L-S频谱分析后反演得到的不同年积日接收机天线距离瞬时海平面高度h的情况,其中横坐标为反射高度,表示从天线到海平面的距离;纵坐标是SNR数据(将SNR数据从dB-Hz更改为线性单位volts/volts).
图6(a)所示第4年积日所获取到的接收机天线距离瞬时海平面高度h为12.73 m,图6(b)所示第16年积日时为12.66 m,图6(c)所示第22年积日时为12.45 m,图6(d)所示第31年积日时为12.44 m.
3.5 潮位对比分析
为了进一步验证和分析GPS SNR监测水位变化的有效性和连续性,本文选取CALC站2019年1月份31天及2017年365天的GPS数据,以及离此站约200 m处的验潮站的实际潮位数据进行比较.
由于通过GPS卫星反演得到的海平面高度是从天线相位中心到海平面的高度,验潮站所测得的结果是海平面高度对于设定基准点的相对变化,因此,两者所参考的基准点不同时,对GPS反演高度与验潮站数据进行比较,减去各自的平均值后获得的序列作为各自的海平面高度变化进行比较.
图7用的是2019年1月份的数据,图中的横坐标是小时(年积日×24),纵坐标为去平均后的监测潮位变化.其中,圆圈所表示的是根据GPS卫星的信噪比数据反演所得的水位结果,曲线为验潮站记录的采样频率为6 min的水位变化情况.

图7 2019年1月份反演的水位与验潮站的水位变化对比图
图8采用的是2017年的数据(横、纵坐标同图7),图中上半部分曲线为SNR反演水位,下半部分曲线为验潮站在其相应时刻的水位变化.

(a)SNR反演水位
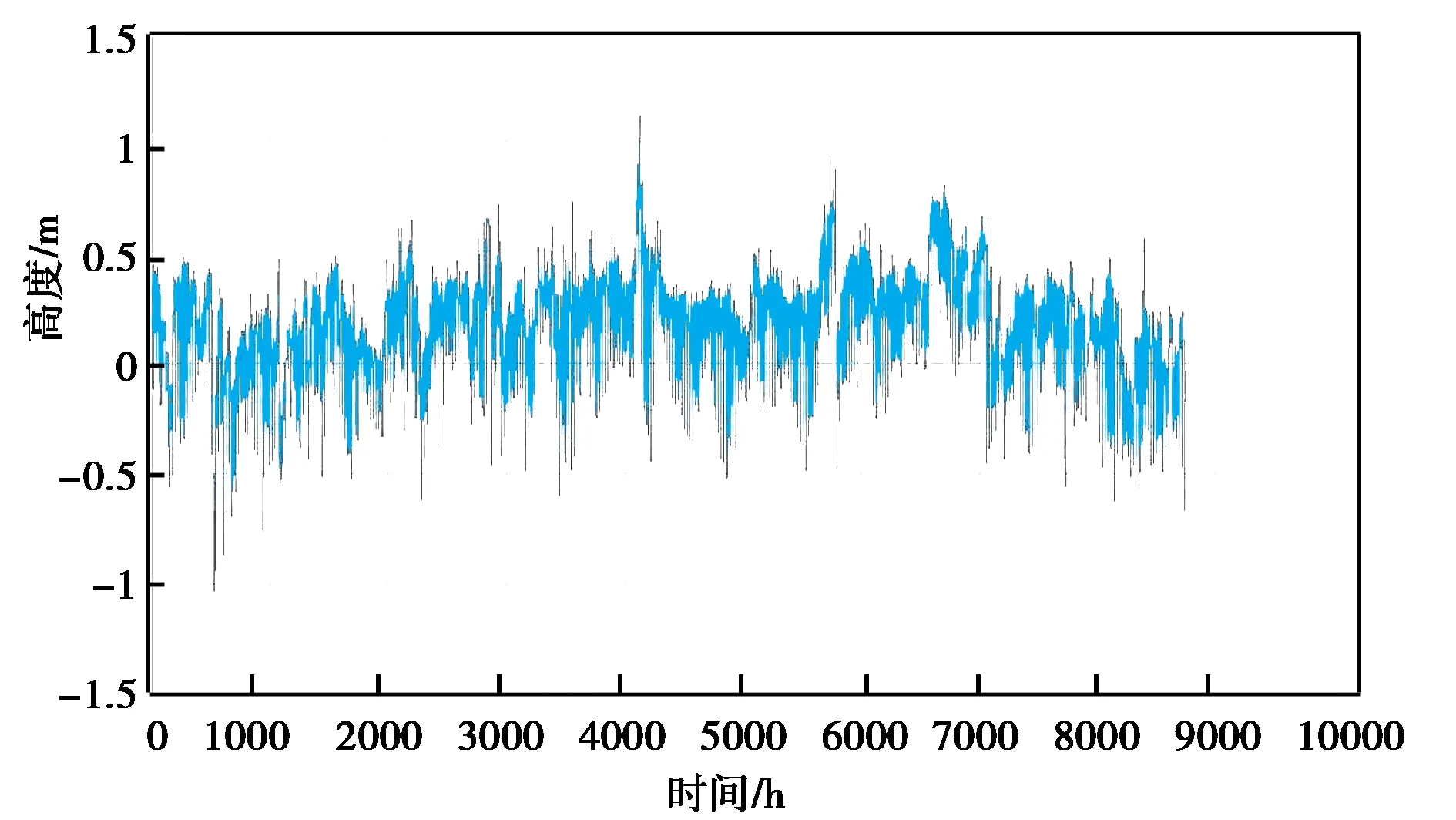
(b)验潮站水位
对反演的2019年1月份31天的数据进行粗差探测,窗口平滑,也对验潮站数据进行相应的窗口平滑后对其进行相关性分析,发现相关性都在0.7以上,其中相关性在0.8~0.9的天数为17天,0.9以上天数为7天,在第4年积日时出现过较高的相关性0.964,平均相关性是0.84.与验潮站水位变化的均方根误差(RMSE)为7.27 cm.
2017年全年数据反演结果与水位变化相关性系数为0.82,相关性如图9所示,与验潮站水位变化的RMSE为8 cm左右.

图9 反演与验潮站相关性
从图7~9中可以看到,利用岸基GPS站的SNR数据获得的水位与实际验潮站水位具有较好的一致性,两者的相关系数优于0.80,RMSE在8 cm左右,验证了GPS RMS数据能够用于水位变化监测理论的可行性,通过不同时段和时长的试验分析证明了岸基GPS站可连续对水位进行监测[5,9,11].
4 结束语
本文进一步验证了GPS信噪比数据进行连续水位监测的可行性,实验结果表明该技术与实际验潮站监测结果具有较好的一致性.但本文实验中尚未考虑到近岸潮汐与海况偏差等诸多因素的影响,精度有待进一步提高.目前,此项技术不仅能应用在潮位变化的监测分析中,还可推广到雪深探测,土壤湿度监测,植被生物量监测中,发挥更加广泛的作用.
