PD引信的悬停直升机旋翼回波特性研究*
2020-03-30王梓宇侯淑君迟德建朱志鹏
蒋 涛,王梓宇,侯淑君,迟德建,朱志鹏
(1 上海机电工程研究所, 上海 201109; 2 92941部队, 辽宁葫芦岛 125000; 3 上海航天技术研究院, 上海 201109)
0 引言
武装直升机凭借良好的低空、超低空飞行性能以及不寻常的悬停性能, 在现代战争中扮演着越来越重要的角色。雷达或导引头对直升机目标的探测问题得到了广泛研究,Martin和Mulgrew[1]给出了直升机旋翼回波模型,解释了雷达跟踪直升机时的闪烁现象;Misiurewicz[2]等基于实验数据验证了直升机旋翼回波的闪烁特性,Rotander、丁建江[3-4]等为旋翼类目标识别提供了理论基础。
不同于雷达或导引头,防空导弹的脉冲多普勒(pulse Doppler,PD)引信(简称PD引信)通常采用高增益的侧向窄波束对目标进行“局部照射”[5],且工作于近场区域,与常规远距离、全照射的雷达探测有本质差异,因此PD引信的直升机旋翼回波特性研究显得十分重要和迫切。
1 直升机旋翼回波模型
对于悬停直升机,其高速旋转的旋翼对PD引信存在相对速度,将对PD引信产生旋翼谱调制。可将直升机旋翼等效为一个长度为L的各向同性线源[6-7],如图1所示,旋翼OB绕旋转中心O旋转,r为桨榖半径。
PD引信的辐射信号为:
us=a(t)exp(jωt)
(1)
式中:a(t)为引信的脉冲调制信号;ω为引信工作角频率。
直升机单片桨叶的回波可表示为:

(2)
式中:A(Gx)为引信天线波束照射方向上的回波幅度,与该方向上的引信天线增益相关;Rx为引信探测中心到旋翼照射点距离;θx为引信对旋翼的照射入射角;frot为旋翼转速;λ为引信工作波长;ω为引信信号角频率。
经引信多普勒解调和滤波处理后可得接收信号ur和多普勒频率fd分别为:
(3)
(4)
式中:vx=2πfrotxm为旋翼在照射点的旋转线速度;φ0为初始相位。
图1 引信与旋翼相对位置
图2 PD引信天线示意图
防空导弹无线电引信结构布局和天线方向图如图2所示。主副瓣天线增益可达30 dB以上,故引信的目标回波能量主要由引信天线主瓣提供,副瓣进入的信号可忽略不计;同时引信天线主瓣宽度一般为5°,且引信工作于近场,只能对旋翼进行局部照射。故式(3)的积分形式可等效为引信天线主瓣照射区域的点源回波模型,即
ur=A(Gm)exp[j(2πfdt+φ0)]
(5)
式中:A(Gm)为引信主瓣照射方向上的旋翼回波幅度;fd为旋翼回波多普勒频率,根据式(4)求得。
旋翼多普勒频率主要和照射处的线速度和引信主波束入射角相关,旋翼谱最大多普勒频率为:
fd,max=2vxcos(θm)/λ
(6)
N片旋翼的雷达回波为:
(7)
式中uri为第i片旋翼的回波。
时域特性方面,受引信主瓣宽度影响,旋翼旋转时,引信的旋翼回波信号存在间断效应,仅当旋翼进入引信主波束时才收到有效回波信号,同时由于旋翼周期旋转,故旋翼回波信号将呈现出周期闪烁效果。 闪烁频率主要与旋翼个数有关。若旋翼数为N,则闪烁频率为:
fshine=2Nfrot
(8)
2 仿真与试验
2.1 数字仿真
数字仿真模型如图3所示,引信位于F点,弹轴指向FO方向;直升机悬停于原点正上方Q,高度为H;AB为等效的双旋翼直升机长度,旋翼以顺时针旋转(俯视);θ为引信主波束倾角;Rc为引信至直升机的水平距离。
图3 仿真模型示意图
以某型双旋翼无人直升机为例,旋翼直径6.2 m,转速frot=8.9 r/s (旋转周期112 ms)。引信主波束倾角60°,波束宽度5°。设定直升机悬停在距引信正前方7.5 m处,悬停高度10 m,使得旋翼的两个翼尖A和B落在引信探测锥面上。同时将旋翼量化为1 001个各向同性的同强度散射点,则旋翼每个点P(x0,y0,z0)绕着Z轴旋转瞬时时刻的坐标为:
(9)
根据式(1)计算旋翼回波。需要说明的是,仿真是将旋翼等效为离散的多散射点,需将积分运算改为求和运算。
仿真观测时间200 ms,仿真得到的旋翼回波多普勒信号如图4所示。仿真结果显示旋翼回波在时域上呈现56 ms的闪烁周期,根据式(8)计算得到上述双旋翼的闪烁周期为112×0.5=56 ms,与仿真结果一致。
对图4的仿真数据进行短时傅里叶变换,得到图5所示的回波信号时-频分布,纵坐标fd,norm为归一化频率,即多普勒频率fd对单位速度引起的多普勒频率归一化:
(10)
式中λ为引信工作频率。在闪烁时间内,旋翼回波能量主要集中在100 Hz频率附近,与根据式(4)计算得到的理论多普勒频率一致。
图4 仿真得到的时域旋翼多普勒回波信号
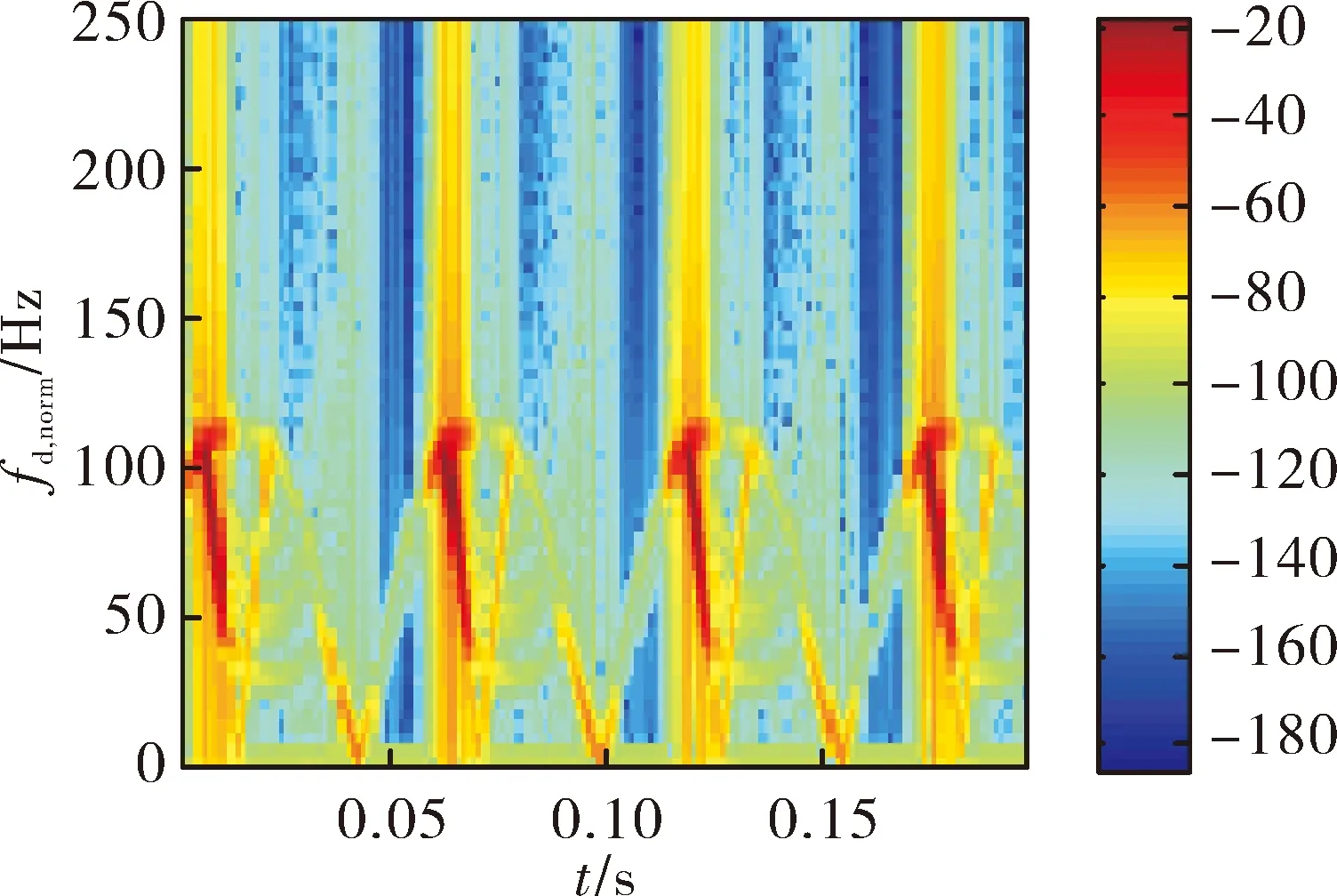
图5 仿真得到的旋翼多普勒回波信号时-频分析
2.2 外场试验
为进一步验证引信的旋翼谱模型,在某试验场开展了引信探测悬停直升机试验,试验所用的引信、直升机参数和几何位置关系与前面数字仿真一致。
试验采集到200 ms长度的引信多普勒回波数据见图6,可见旋翼回波同样呈现56 ms的闪烁周期,与分析结果一致。
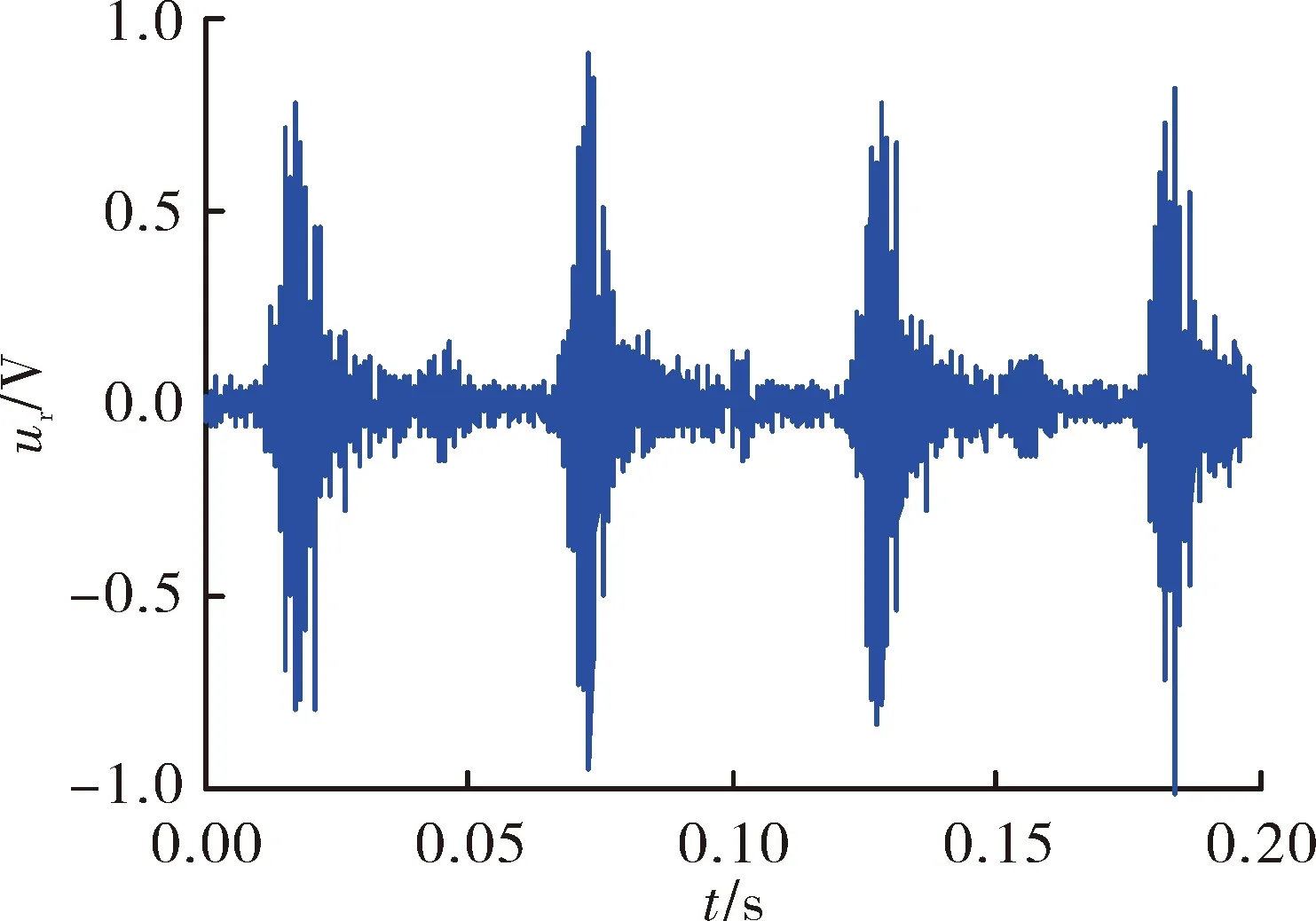
图6 时域旋翼多普勒回波信号
图7为旋翼多普勒回波信号的短时傅里叶变换分布,可见旋翼多普勒回波能量同样集中于100 Hz附近,对应引信天线主瓣照射到旋翼时的理论多普勒频率。
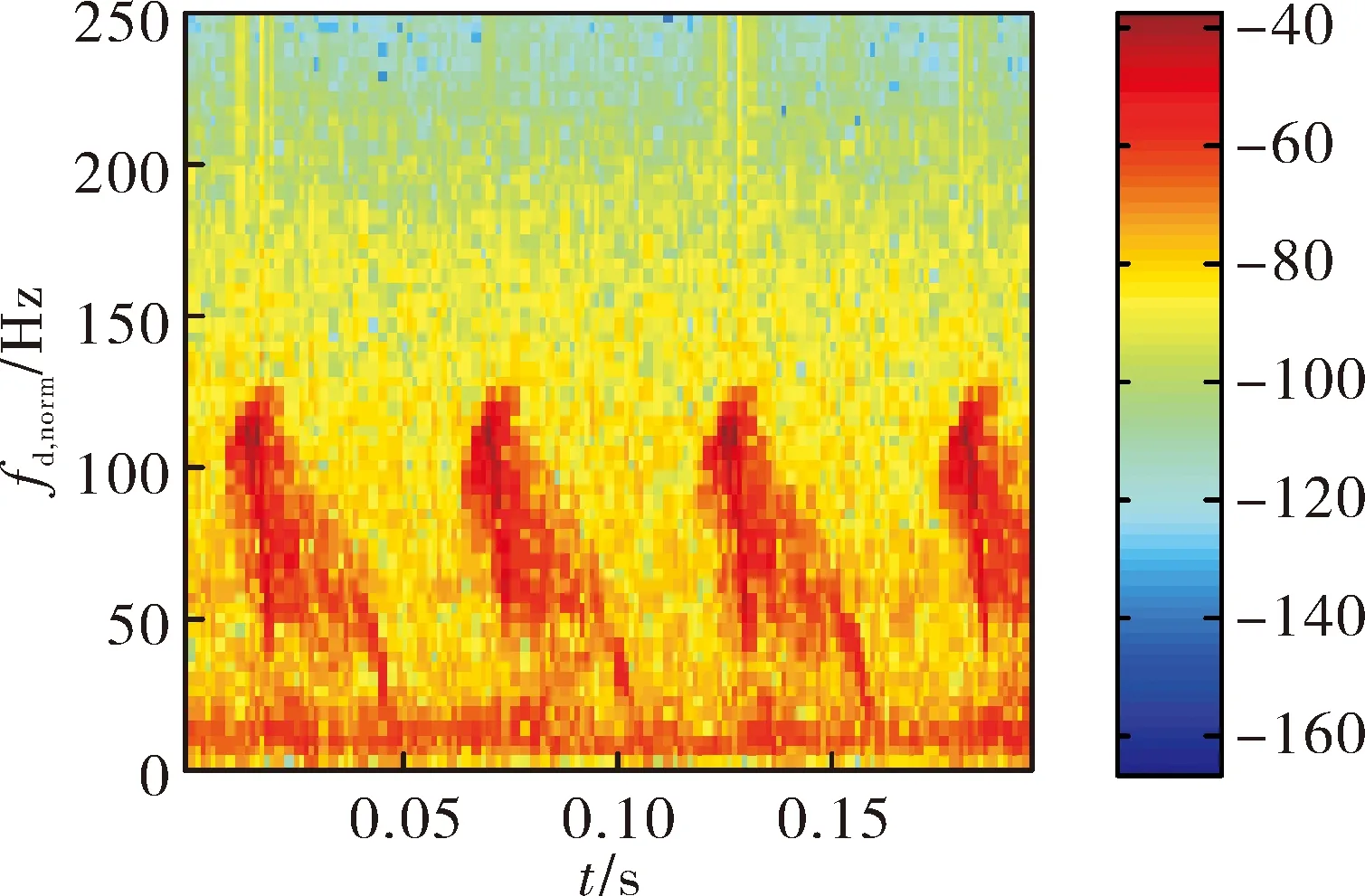
图7 旋翼多普勒回波信号时-频分析
3 结束语
研究了PD引信对悬停直升机旋翼回波特性。经理论分析、数字仿真和外场试验表明,悬停直升机旋翼会对引信接收到的回波信号产生多普勒调制效应。受引信窄波束、局部照射的影响,引信接收到的旋翼回波可等效为引信主波束照射到的旋翼散射点回波矢量合成,其回波特性可由散射点与引信的相对位置和速度关系决定。实际使用时,导弹和直升机存在弹目相对速度,当引信波束同时探测到旋翼与直升机机体时,引信回波信号频谱将由机身谱和旋翼谱合成,可能影响引信对直升机的探测性能,此时需要考虑旋翼谱的影响。
