六自由度液压换刀机械臂的设计与分析
2020-03-27孙颜明徐莉萍任德志
孙颜明,徐莉萍,任德志
1河南科技大学机电工程学院 河南洛阳 471003
2郑州科技学院机械工程学院 河南郑州 450064
在 盾构机施工过程中,刀具的磨损不可避免。当刀具磨损到一定程度时,便需要对刀具进行更换,否则会损坏盾构机的刀盘,影响盾构机的正常掘进,甚至会缩短盾构机的寿命。根据调查发现,目前盾构机换刀采用的人工更换方案,不仅耗资大、耗时长,且严重危害作业人员的健康[1]。国外通过对KUKA 机械臂进行改造,用于盾构机刀具的拆卸与安装[2],但由于该机械臂本体结构的局限性,导致其不能很好地适应盾构机内部环境。
笔者根据盾构机内部结构,以及液压技术的发展,设计了一款盾构机专用的液压驱动换刀机械臂,以降低盾构机换刀的成本,提高换刀效率与总体施工效率,保证整个隧道施工过程的顺利进行。通过对换刀机械臂进行运动学分析和轨迹规划研究,为其运动规划、智能控制等研究提供依据。
1 换刀机械臂本体设计
1.1 技术难点分析
通过对现有人工进仓换刀方案进行分析,结合盾构机的结构环境,确定换刀机械臂的作业流程:盾构机停机,确定需要更换刀具的具体位置;机械臂带动末端手爪抓取需要更换的磨损刀具;将抓取的刀具带回舱体内;携带新的刀具运动到刀盘相应位置并进行安装;继续下一刀具的更换任务;完成换刀任务后,机械臂缩回舱体内,关闭舱门,刀盘旋转,盾构机继续工作。
通过分析以上工作流程,总结出机械臂换刀主要面临以下困难:对换刀机械臂的负载能力有较高要求;盾构机内部空间有限,换刀机械臂应当具有较高的灵活性;工作环境恶劣。
1.2 总体设计
通过综合考虑换刀机械臂的作业要求和环境限制,确定换刀机械臂为 6 自由度关节构型,即 J1 基座回转、J2 大臂俯仰、J3 小臂俯仰、J4 腕关节俯仰、J5 腕关节摆动和 J6 腕关节回转,此外,手爪的开合自由度能实现对刀具抓取。针对盾构机对换刀机械臂的结构紧凑、末端负载较大的需求,机械臂各关节均采用液压驱动,即通过直线液压缸、液压马达与摆动液压缸来实现关节的俯仰和摆动。换刀机械臂整体结构如图 1 所示。

图1 盾构机换刀机械臂的整体结构Fig.1 Overall structure of tool-changing manipulator for shield machine
2 运动学分析
2.1 换刀机械臂正运动学分析
换刀机械臂为六自由度开链机构,采用标准D-H 参数法将连杆固定形成坐标系,则机械臂的连杆坐标系如图 2 所示,其具体 D-H 参数如表 1 所列。
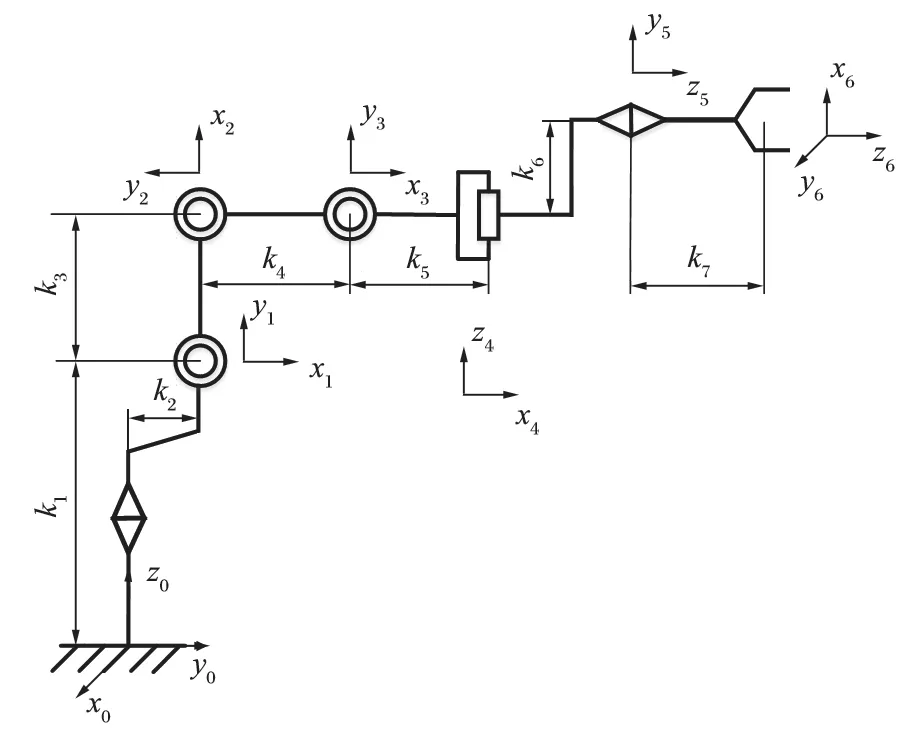
图2 换刀机械臂连杆坐标系Fig.2 Linkage coordinate system of tool-changing manipulator

表1 机械臂的 D-H 参数Tab.1 D-H parameters of manipulator
表1 中,k1=200,k2=140,k3=880,k4=560,k5=175,k6=40,k7=552。
连杆坐标系间的变换为
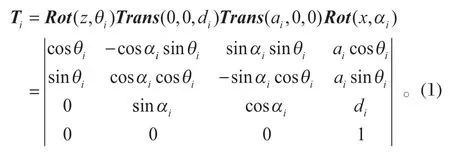
将表 1 中的参数代入式 (1),获得相邻连杆坐标系之间的齐次变换矩阵T1、T2、T3、T4、T5、T6,则换刀机械臂末端手爪在基坐标系下的位姿可表示为
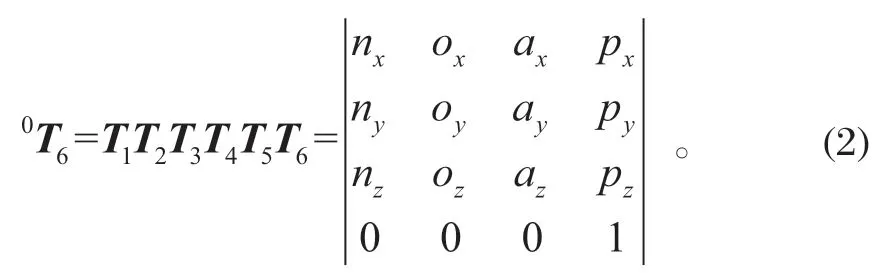
式中:[nx ny nz]T、[ox oy oz]T、[ax ay az]T为机械臂末端相对于基座坐标系的姿态向量;[px py pz]T为机械臂末端在基坐标系的位置向量。
2.2 换刀机械臂逆运动学分析
根据机械臂在基坐标下的末端位姿,进行关节角的求解就是机械臂的逆问题。由于所研究的机械臂满足 Pieper 法则,即第 2、3、4 关节的轴线相互平行,因此通过解析法进行机械臂的逆运动学求解。
(1)首先,已知机械臂末端在基坐标下的位姿如式 (2)所示,将式 (2)左乘T1的逆矩阵、右乘T6的逆矩阵,得

根据式 (3)左、右两边矩阵对应的元素相等,由第 3 行第 4 列元素相等,得:
①当k7ay-py=0 时,若k7ax-py>0,θ1=0;若k7ax-py<0,θ1=180°。
② 当k7ax-px=0 时,θ1=90°。
③其他情况下,

(2)由式 (3)两边矩阵第 3 行第 3 列元素相等得

(3)由式 (3)两边第 3 行第 2 列元素相等得:
①当oycosθ1-oxsinθ1=0 时,若nycosθ1-nxsinθ1>0,θ6=0;若nycosθ1-nxsinθ1<0,θ6=180°。
② 当nycosθ1-nxsinθ1=0 时,θ6=90°。
③其他情况下,

(4)由于机械臂的第 2、3、4 关节轴线平行,因此构成图 3 所示的平面 2R 机械臂,此时第 2 关节的坐标原点o1为该 2R 机械臂的基座,第 4 关节的坐标原点o3为机械臂的末端。机械臂末端o3在基坐标系o1下的位姿为


图3 第 2、3、4 关节构成的平面 2R 机械臂Fig.3 2R plane manipulator consisting of joint 2,3,4
由于式 (4)右端矩阵第 1 行第 4 个元素r(1,4)、第2 行第 4 个元素r(2,4)分别表示o3在o1下的笛卡尔坐标,因此

在△o1o2o3中,由余弦定理得

根据式 (5)、(6)得

(5)由于
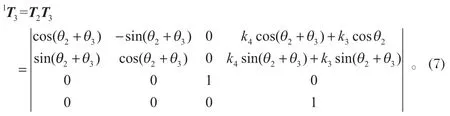
式 (7)与式 (4)第 3 行第 1 列元素相等,且其本体结构的限制θ4∈[20°,65°],因此θ4有唯一解,
θ4=-arctan (cosθ5(sinθ6(oycosθ1-oxcosθ1)-cosθ6(nycosθ1-nxsinθ1))-sinθ5(aycosθ1-axsinθ1))/(sinθ6(nycosθ1-nxsinθ1)+cosθ6(oycosθ1-oxsinθ1))。
(6)由式 (7)与式 (4)第 2 行第 2 列元素相等,得θ2=arccos (sinθ4(azsinθ5+cosθ5(nzcosθ6-ozsinθ6))+cosθ4(ozcosθ6+nzsinθ1))-θ3。
3 MATLAB 仿真验证
3.1 运动学仿真
为进行运动学分析验证,随意给定机械臂 1 组关节向量θ=[π/2,π/6,-π/3,π/3,π/2,0]T,将其代入机械臂式 (2),则末端相的位姿矩阵
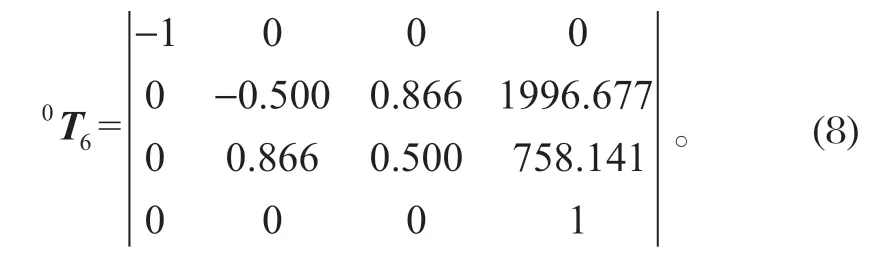
为进行验证,通过 Robotics Toolbox 进行机械臂的建模,并给定机械臂的关节变量θ=[π/2,π/6,-π/3,π/3,π/2,0]T,机械臂的位姿如图 4 所示,仿真结果的位姿与式 (8)理论计算结果一致,表明运动学计算的正确性。

图4 给定关节变量换刀机械臂的位姿仿真Fig.4 Posture simulation of tool-changing manipulator at given joint parameters
3.2 可达工作空间分析
工作空间表示机械臂末端执行器所能到达的空间几何,是机械臂的重要指标之一[3-4]。
借助 MATLAB 软件,基于蒙特卡罗法,采用随机取样的方法随机生成机械臂的关节变量值,然后将其代入式 (2),生成随机的机械臂末端参考点。大量随机的末端参考点构成如图 5 所示的工作空间云图。由于机械臂的主要工作面为盾构机的轴截面,即基坐标系下的y0o0z0平面,因此,令θ1=90°,其他关节为随机值,可获得图 6 所示的机械臂活动范围。

图5 机械臂工作空间云图Fig.5 Contours of manipulator workspace
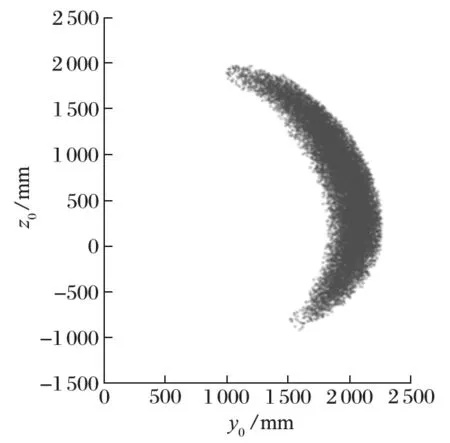
图6 工作空间在 o0y0z0平面的截面Fig.6 Section of workspace on plane o0y0z0
从图 5、6 中可以获得换刀机械臂的主要作业范围:最大作业半径为 2 270 mm;最大作业高度为 2 000 mm;最大作业深度为 920 mm。即机械臂的作业空间较大,可满足盾构机对作业空间的需求。
3.3 轨迹规划研究
由于关节空间下的路径规划[5]能直接反映出机械臂各关节的运动情况,因此笔者采用五次多项式插值在关节空间下进行轨迹规划。设规划时间tf=30 s,机械臂的初始位姿对应的关节量θ(0)=[π/4,π/3,-π/4,π/3,5π/4,0]T,目标点位姿对应的关节量θ(30)=[π/2,π/6,-π/3,π/4,π/2,π/4]T,通过五次多项式插值,获得各关节角位移曲线、角速度曲线、角加速度曲线分别如图 7~9 所示。

图7 各关节角位移曲线Fig.7 Angular displacement curves of various joints
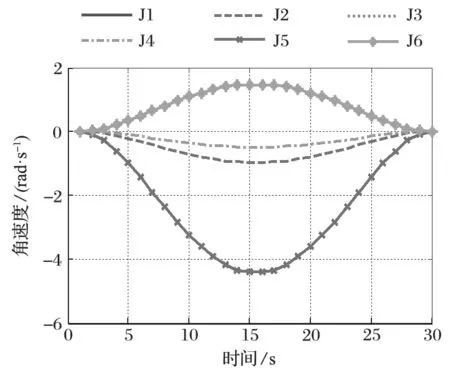
图8 各关节角速度曲线Fig.8 Velocity curves of various joints
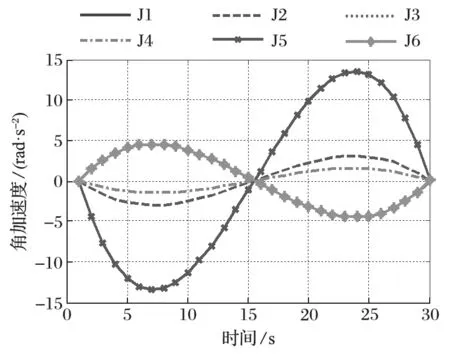
图9 各关节角加速度曲线Fig.9 Angular acceleration curves of various joints
通过轨迹规划仿真发现,采用五次多项式插值后,各关节的角位移、角速度、角加速度曲线都较为光滑,能够用于实现机械臂的动作。由图 7 可知,各关节角速度在 15 s 时最大,并且在 30 s 时,各关节速度为零,停止动作;由图 8 可知,各关节角加速度服从正 S 曲线,先为正,后为负,并且在 30 s 时速度都为零 (J1 与 J6 关节角速度曲线重合、J3 与 J4 关节角速度曲线重合);由图 9 可知,第 5 关节在动作过程中角加速度较大 (J1 与 J6 关节角加速度曲线重合、J3 与 J4 关节角加速度曲线重合),因此其驱动力矩也应最大,在进行液压系统设计与控制时,应加以注意。
4 结论
通过对盾构机换刀任务进行分析,设计了一种针对盾构机换刀的液压换刀机械臂。针对机械臂的构型特点,建立各连杆坐标系,对其进行运动学建模,获得末端手爪相对于基座的位置坐标和关节空间与笛卡尔空间的映射关系。借助 MATLAB 软件,基于蒙特卡罗法,得到机械臂的工作空间云图,获得其工作范围。采用 MATLAB 软件进行机械臂关节空间下的五次多项式轨迹规划,仿真结果表明,机械臂动作平稳,为机械臂的设计开发和后续的研究提供参考。
