基于干扰观测器的逆变器在线死区补偿*
2020-03-26冯振东张力平蔺宏良
冯振东,张力平,周 浩,钦 杰,蔺宏良
(长安大学陕西省高速公路施工机械重点实验室,西安 710064)
0 引言
近年来,功率开关器件如绝缘栅型场效应晶体管(MOSFET)和绝缘栅双极型晶体管(IGBT)的飞速发展,使得应用矢量脉冲宽度调制技术的电压源型逆变器得到了大量地应用。在理想三相桥式逆变电路中,每相桥臂的上、下2个开关管工作在互补状态——上管导通,下管随即关断,反之亦然。然而在实际电路中,由于功率开关管开通时间通常大于关断时间[1]。为了防止同一桥臂的上、下2个开关管同时导通造成直流电压源短路,需要人为在开关管动作期间插入一段死区时间。
死区时间的长短由开关管和预驱电路参数确定,一般在1~5μs之间。嵌入死区时间引起的延迟可以防止上下桥直通引起的直流电压源短路,但也会给输出电压带来幅值和相位偏差。虽然在单个PWM周期内的电压偏差并不大,但随着开关频率的提高,偏差电压的累积将导致严重的输出电压畸变,从而导致输出电流中奇次谐波增大,波形发生畸变。尤其是在低速轻载或者开关频率较高时,死区所占比例较大,电机转矩波动和电磁噪声增大,直接影响系统稳定性[2-3]。
基于以上原因,国内外学者提出了多种补偿策略来消除死区效应。其中最普遍的方式是利用平均误差理论,根据死区时间计算出相应等效死区电压,并根据电流极性补偿到对应指令电压中。该方法简单易行,应用广泛,但需要检测电流极性。采用硬件电路进行电流极性检测会增大成本,同时还会有检测滞后和A/D转换精度的问题[4],所以目前多数采用软件估算方法。软件估算是通过电流重构,利用电流矢量角判断电流过零点来估算电流极性,同时对坐标变换后的直流分量进行滤波可以减少滤波过程对电流幅值和相位的影响。但由于零电流钳位、调制噪声等的影响,直接判断电流矢量角度难以确保电流极性检测精度[5],同时也忽略了功率器件开关延迟、饱和导通压降和运行工况变化带来的影响。针对上述问题,有学者提出新的补偿策略,将死区效应、开关管动作延迟、饱和导通压降等造成的扰动视作一个误差电压[5-7],通过构建系统模型对其进行观测,进行在线补偿。
本文通过构建干扰观测器(disturbance observer,DOB)的方式对扰动电压在同步旋转坐标系下的误差分量进行观测,采用一阶低通滤波器滤除系统噪声后将该误差分量反馈到指令电压,实现永磁同步电机控制系统在线死区补偿。
1 死区效应分析
1.1 VSI死区效应
图1为逆变器A相基本结构。Q1、Q2分别为上、下桥开关器件,D1、D2为对应桥臂上的反接续流二极管,其输出连接到电机A相绕组。定义流出逆变器电流方向为正,流入逆变器电流方向为负。

图1 逆变器A相桥臂基本结构
在理想工况下,控制逆变器上下桥臂的是互补PWM信号,在上管导通时,下管关断,电流从直流电源正极经Q1流入A相,此时电流方向为正;反之,下管导通,上管关闭,电流从电机A相经Q2流入电源负极,电流方向为负。在加入死区时间后,死区时间段内,上下两管都为关断状态,但是由于电机绕组中感性负载的作用,三相电流将通过续流二极管流动,iA>0,电流经D2续流;iA<0,电流经D1续流。所以在死区时间内,桥臂的输出电压将不受开关管控制,而是由相电流的极性决定。
图2为电流极性为正时,单个PWM周期内开关信号分析。其中,Q1_pwm和Q2_pwm为互补的理想上下管开关信号。Q1_dt、Q2_dt是加入死区时间Td后的开关信号。Q1_actual、Q2_actual是同时考虑死区时间、开关管开通和关断延时的开关信号,Ton为开通延时,Toff为关断延时。

图2 单个PWM周期开关信号
在一个PWM周期,由嵌入的死区、开关管导通和关断延时造成的等效扰动时间可表示如式(1)。

A相实际输出电压与理想输出电压在1个周期内的平均误差电压计算公式如式(2)。

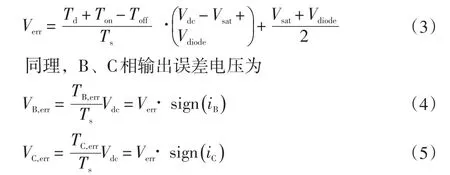
考虑开关管饱和压降Vsat和续流二极管导通压降Vdiode时,误差电压[7]计算公式如式(3)、(4)、(5)。
1.2 死区效应对输出相电压的影响分析
根据公式(2)(4)(5)可知逆变器施加到永磁同步电机上的相误差电压VAn,err、VBn,err、VCn,err分别如式(6)所示。

因为VA,err、VB,err、VC,err幅值都为Verr,则式(6)经傅里叶变换后如式(7)所示。
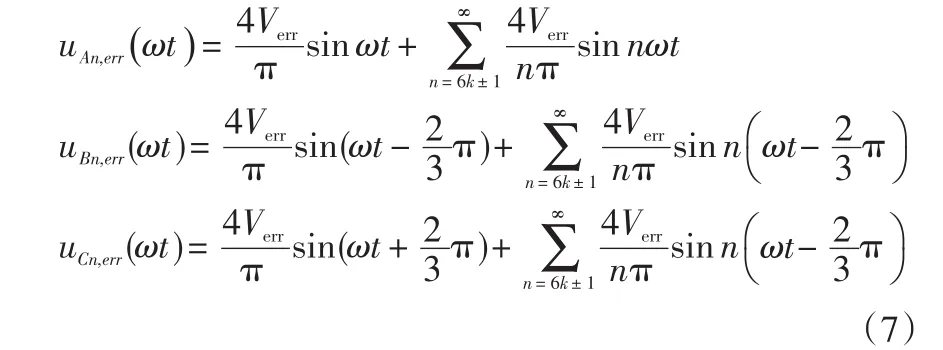
式中:k=1,2,3…;ω为电角速度值。
根据式(7)知,死区效应导致永磁同步电机三相误差电压波形中含有6k+1次谐波。由公式(3)可知,死区效应在输出电压中引入的扰动与死区时间成正比,与开关周期成反比。即死区时间越长,开关频率越高,逆变器输出基波电压中的6k+1谐波就越多。同时,误差电压还与直流侧电压成正比,其矢量方向由电流极性决定。当电机在高速重载时,误差电压相对给定电压较小,谐波成分较少,对控制系统的影响不大;但电机运行在低速轻载时,给定电压减小,此时误差电压相比给定电压无法忽略,电压畸变严重,会使电机出现明显的转矩脉动和噪声。
2 干扰观测器构建
死区时间通常是固定的,但功率器件的开通和关断延时、饱和导通压降会随着运行环境而变化,此外母线电压的变化也会引起扰动电压的波动。因此,干扰电压是随运行环境变化的时变值。针对扰动电压存在的周期性波动以及环境变化带来的不确定性影响,本文采用干扰观测器(Disturbance observer,DOB)对死区效应引起的干扰电压进行在线估计,并将观测结果导入到指令电压中进行补偿。
三是机构间存在差别。依据机构特点、成果性质以及劳资合同或事先约定等情况的不同,各机构科研成果的收益分配情况不完全一样。《雇员发明法》规定,高校雇员作为发明人应获得发明转化毛收入的30%,高校作为知识产权所有人获得70%收入;如研发由两个机构合作完成,则各获35%,依此类推。但对高校外的独立科研机构的收益分配没有明确规定,在实际中是11%到30%之间。其中,主要从事前沿基础研究的科研机构的发明人获益较高,最多可得30%,如马普学会[9~11];主要从事应用研究的科研机构的发明人获益较低,约为20%左右,如弗劳恩霍夫协会[7]。
在系统设计时,DOB能将系统不确定性造成的实际运行对象与名义模型输出的差异视为系统扰动,并对扰动进行有效地估计和补偿,实现对干扰的抑制[9-10]。DOB的控制结构如图3所示,d为系统所受到的干扰;为干扰的估计值;GP(s)为实际运行对象的传递函数;ξ为系统观测噪声;Q(s)为低通滤波器,用以滤除测量噪声。
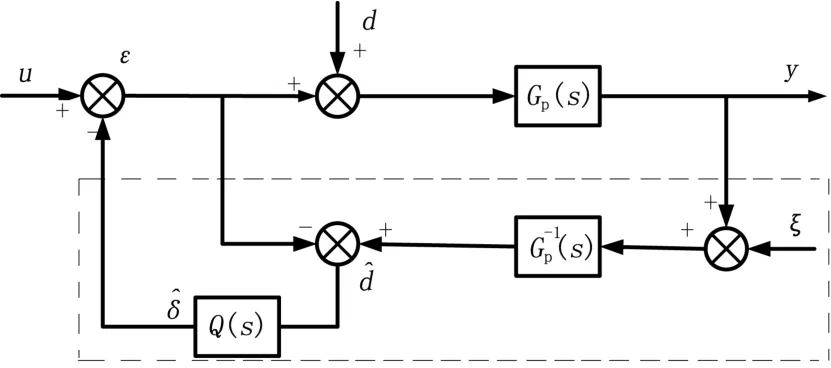
图3 干扰观测器结构图
干扰观测器估计结果中会含有大量观测噪声,而如果对逆变器三相输出电压信号直接进行观测并滤波,会造成信号幅值的衰减和相位延迟,难以达到补偿效果[11]。本文将死区效应、开关管动作延时等误差电压信号转换到两相旋转坐标系中,实现误差信号由矢量到标量的转换。而对该信号的滤波不会造成相位延迟,并且可以直接前馈到控制器输入端,简化了实现方式。
考虑干扰电压的永磁同步电机电压方程在两相旋转坐标系下的表达如式(8)。

式中:Rs表示定子相电阻;Vd、Vq、id、iq、Ld、Ld分别为两相旋转坐标系下d轴和q轴电压、电流、电感;ψf为转子永磁体磁通;Vd,err、Vq,err为死区效应在旋转坐标下的扰动电压。
加入补偿电压Vd,com、Vq,com并对式(8)进行离散化后,PMSM电压方程如式(9)。

根据式(8)和式(9),当前补偿电压Vd,com(k),Vq,com(k)与干扰电压Vd,err(k),Vq,err(k)相等时,d轴和q轴电压与PMSM理论值一致,消除了死区效应等干扰因素的影响。式(9)中采样周期一般很小,在微秒级左右,因此可以认为在一个采样周期内,干扰电压的变化量接近于0。即

根据公式(10),可以利用前一个采样周期的干扰电压来估计当前周期的干扰电压。即


图4 在线死区补偿原理图
3 仿真验证与结果分析
为了验证对死区效应进行在线补偿算法的有效性,本文通过MATLAB/Simulink建立系统仿真模型。首先搭建了针对永磁同步电机的速度-电流双闭环控制模型,采用Id=0的磁场定向矢量控制和具有死区输出的SVPWM算法。电机参数:极对数Pn=4,定子电阻R=0.958 Ω,定子直轴电感Ld=5.25 mH,定子交轴电感Lq=12 mH,转子永磁体磁链ψf=0.182 7 Wb,转子转动惯量J=0.003 kg∙cm2,SVPWM运行周期Ts=0.000 1 s,母线电压311V。设定目标转速为500 r/min,负载为10N·m。
图5为无死区时间时,永磁同步电机三相相电流波形和坐标变换后dq轴电流波形图。可以看出,在进入稳定段之后,电机三相相电流波形为标准的正弦波。dq轴电流波动很小。

图5 无死区时的相电流波形
图6为加入5 us死区后的相电流波形和频谱。从图中可以看出相电流有明显的零电流钳位现象,正弦度差,id波动明显增大。从图6(c)中可以看出,电流频谱中含有较多的5th、7th、11th、13th谐波,符合式(7)分析中的6k+1次谐波扰动。此时相电流总谐波失真率为5.86%,电流畸变较为严重,死区对系统有明显的影响。图7为使用本文所提出的干扰观测器在线补偿后的相电流波形和频谱。

图6 5us死区的相电流波形和频谱
如图7所示,使用干扰观测器进行在线死区补偿后的相电流波形正弦度得到改善,零电流钳位现象得到明显抑制,d轴电流波动减弱,同时有效削弱了5th、7th、11th、13th等谐波,总谐波失真率由5.86%降至2.60%,有效降低了死区效应对整个系统的影响。
4 结束语
本文详细分析了三相桥式电压源型逆变器的死区效应,提出了基于干扰观测器(DOB)的死区在线补偿方法。该方法将死区效应、器件通断延时等视作扰动电压,进行在线估计并进行前馈补偿,无需进行相电流极性判断和参数离线测量便可实现对死区的有效补偿。仿真结果表明,该策略可以有效抑制由逆变器死区带来的零电流钳位现象,减小电流谐波失真率,改善电流波形,提高系统的运行稳定性。

图7 在线死区补偿后的相电流波形和频谱
