多机驱动带式输送机拉紧装置研究
2020-03-26王志鹏
王志鹏
(阳煤集团一矿,山西阳泉 045000)
0 引言
随着煤矿生产规模的不断扩大,对带式输送机的要求不断提升,输送机功率不断增大,距离不断增长。总功率1 000 kW的大功率带式输送机应用场合明显增多。在长距离皮带运输中,一般采用多机驱动的工作方式,在多电机驱动的皮带结构中,负荷实时变化,皮带上的张力随之改变,容易在皮带与滚筒之间出现摩擦力的减弱,影响皮带运输机的正常工作,减小皮带使用寿命。本文在自动拉紧装置的基础上,设计一种可调节的皮带拉紧器,可以通过分析皮带张力变化,自动调节拉紧装置的松紧程度,调整皮带上的张力,维持皮带张力的稳定[1-3]。
1 带式输送机系统
目前,长距离带式输送机的拉紧装置结构有3种[4-6]:重锤拉紧装置、固定拉紧装置、自动拉紧装置。重锤拉紧装置通过调节重锤的重量,调节拉紧力,这种办法可以在皮带上的负载视为恒定且皮带加速度恒定的运行条件下实现功能,当皮带上的负载出现变动,皮带加速度出现抖动时,无法实时调节拉紧力;固定拉紧装置通过固定拉紧滚筒位置保证皮带上的拉紧力恒定不变,调整时需要暂停皮带运输,工作效率较低;自动拉紧装置可以实时调节皮带张力,结构较为复杂,可以实现起动、正常运行和停止阶段的张力恒定[7]。
1.1 系统结构
带式输送机的基本结构如图1所示,主要包括:驱动单元、传动带、托辊、拉紧小车等,两个滚筒可以为皮带提供传送的动力,通过滚筒和皮带之间的摩擦产生传动的动力。在皮带的下端有托辊装置,可以为皮带上的煤炭提供支撑,托辊与皮带之间的摩擦力比较小。由于托辊不能给皮带提供动力,当传输距离较长时,可以通过在滚筒之间增加滚筒的方法,为长距离运输皮带提供动力[8]。

图1 带式输送机的基本结构
拉紧装置安装于两个驱动滚筒之间(导向滚筒的空载侧),拉紧装置包括机械结构和电气结构2个部分,拉紧装置的机械部分,包括钢绞绳、滑轮、拉紧小车和相关的液压装置;电气结构部分包括主控制器、张力传感器等。
1.2 工作原理
拉紧装置对传感器采集的皮带张力信号进行分析,确定张力调节方案,通过电机驱动液压马达输出扭矩控制绞车的正反转,驱动拉紧小车动作,实现皮带张力调节的目标。
拉紧小车固定在特有的轨道上,可以实现前后的移动,调节前后皮带上的拉力,拉紧装置的工作时限包括皮带运输的整个过程,包括皮带启动前、正常运行时、紧急制动时、皮带停止后。当皮带上的负载出现不断变化时,控制器通过PID策略不断调节小车的位置,稳定皮带上的张力,增加皮带运行稳定性。
1.3 安装要求
拉紧装置的调节为实时的,需要根据皮带张力做出快速的相应,因此,拉紧装置需要安装在驱动滚筒的空载侧,由于拉紧小车电机驱动能力较低,需要安装在皮带张力最小处,可以实现控制相应的快速性。
2 电气结构设计
2.1 皮带拉力分析
皮带运输机皮带上的张力受到负载、滚筒、托辊、运行速度等多方面因素的影响,根据皮带运行不同时刻的受力特性,可以将皮带张力的分析分为启动、正常运行、制动3个阶段进行受力分析。
在启动阶段,电机上的负载突然增大,皮带与滚筒之间的摩擦力增大,需要提供较大的拉力,实现皮带运输机的启动,为了配合皮带拉力的增加,将拉紧装置的拉紧力增加为额定值的1.5倍;正常运行时,拉紧力为拉紧滚筒两端胶带的张力差值,附加一定的安全系数(一般为1.1);皮带运输机在制动过程中,皮带在滚筒上产生反向的摩擦力,拉紧力约为正常运行的0.9倍。
2.2 主控制器选型
带式输送机拉紧装置电控系统的主控制器选型为S7-300,该款PLC是德国西门子公司生产的可编程序控制器(PLC)系列产品之一。其模块化结构、易于实现分布式的配置以及性价比高、电磁兼容性强、抗震动冲击性能好,使其在广泛的工业控制领域中,成为一种既经济又切合实际的解决方案。可扩展模块高达32个,可以利用STEP进行编程,满足拉紧装置的控制需求。
2.3 电控系统结构
以PLC为核心的电控系统结构如图2所示,PLC实现对现场皮带张力数据的采集和分析,拉紧小车的运动通过驱动电机的运行进行调节,在S7-300控制器和驱动电机之间,增加光电隔离单元,提高系统抗干扰性能,在皮带启动、正常运行、制动停机3个阶段,分别读取张力传感器上的数据,并进行存储,方便故障后进行数据的分析。

图2 电控系统结构
2.4 传感器选型
张力传感器型号选型为ETG,该传感器正常工作时的电流为0.03 A,工作电压为10 V,为悬臂式张力辊,适用于线状、条状、带状物体的张力监测,辊面长度450 mm,辊面直径60 mm,经过信号调理电路后,可以输出0~10 V电压或4~20 mA电流信号。测量精度小于1%,工作温度为-20~+70℃。
2.5 液压控制原理
拉紧小车的控制系统结构如图3所示[9],包括液压控制系统、拉力传感器张紧缓冲油箱、盘形制动器等部分。
在皮带运输机启动之前,液压油泵通过向张紧缓冲油箱填充油的方式,向拉紧小车提供拉力,拉力传感器检测拉紧小车上的拉力数值,当数值达到皮带启动要求时,盘形制动器闭合,拉紧小车保持位置不动,直到皮带正常启动。
皮带运输机正常运行时,液压泵空载运行,液压控制系统停止工作,拉紧小车的缓冲余量通过蓄能器调节,保证皮带在负载变动的过程中维持稳定,如果皮带张力大于正常张力的1.1倍时,盘形制动器打开,液压泵重新启动,增加皮带张力。
在皮带运输机的制动阶段,盘形制动器松闸,减小输送带上的拉紧力,调节输送带拉紧力至皮带运输机停车。

图3 拉紧小车控制结构
3 控制策略研究
皮带张力控制具有实时的特性,在皮带正常运行过程中,蓄能器可以达到稳定皮带运输的目的,难以达到更加精准的控制目标,因此,在蓄能器稳定皮带运输系统的基础上,增加PID控制策略,实现对皮带张力的精准调控,皮带张力PID控制结构如图4所示。
在皮带张力控制策略中,首先,根据皮带工作的不同阶段,输入给定值及实时采集的皮带张力数据,根据两者数值大小计算偏差,将偏差输入给控制器,控制器内部有PID算法程序,通过调节输出量控制现场执行器,使系统的偏差趋于零,被控变量(皮带张力)实时通过传感器、变送器输送给控制器的输入端。
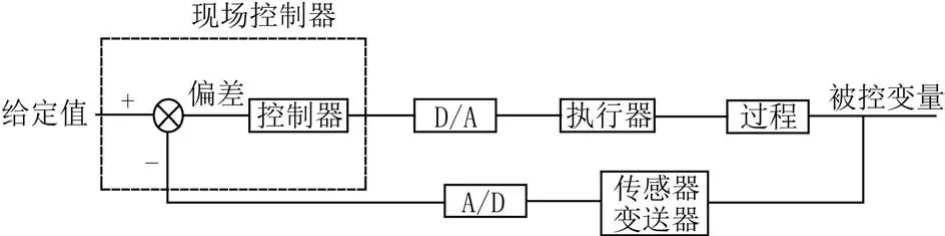
图4 PID控制结构图
4 结束语
重锤拉紧装置、固定拉紧装置、自动拉紧装置是长距离带式输送机常见的3种拉紧装置,本文对煤矿多机驱动带式输送机的系统结构进行分析,对自动拉紧装置进行优化设计,利用拉紧小车实时调节皮带张力,保障皮带运输系统的稳定性,在皮带拉力分析的基础上,利用PLC控制技术,对电气控制系统进行设计,利用PID控制策略,增加皮带张力调节的准确性。
