起落架舱制孔系统设计概述
2020-03-25胡迪锋周向阳苗蓬勃刘瑛
胡迪锋 周向阳 苗蓬勃 刘瑛


摘 要 针对飞机起落架舱的制孔工艺,提高制孔质量与效率,设计了一种面向飞机起落架舱的自动化制孔系统。该系统的机械执行机构由伺服电机、丝杆螺母机构、滚珠导轨来实现的。由PLC控制器作为系统的中央控制中心,协调控制各机构的运动。为了提高控制性能,采用分数阶PID控制。分数阶PID控制器较传统的PID控制多引入了2个参数,进而可以大大提高控制系统系统的鲁棒性。因为分数阶PID控制器的控制性能取决于参数的选择,所以利用粒子群算法以获得较佳的参数设置。
关键词 起落架舱;制孔系统;分数阶PID控制;粒子群算法
Design of Drilling Systems for the Wheel Well of Aircraft
Hu Difeng Zhou Xiangyang Miao Pengbo Liu Ying
Hangzhou Vocational and Technical College, Hangzhou, 310018
Abstract In order to improve the drilling quality and efficiency of the wheel well of aircraft, an automatic drilling system is designed. Its mechanical actuator is made of servo motor, feed screw and ball guide rail. PLC controller is used as the controlling center, which coordinates and controls the movement of all units. In order for better controlling performance, a fractional order PID controller is adopted. Compared with the traditional PID controller, two more parameters are introduced into the fractional order controller, so the controlling of the fractional order controller is much more robust. Since its controlling performance is dependent on its parameters, PSO is used to search for the better parameter combination.
Keywords Wheel well; Drilling system; Fractional order PID; Particle swarm optimization
引言
飛机零部件的装配主要依靠铆接来实现。铆接质量直接影响飞机的整体性能,如抗疲劳性能、可靠性等。为了获得较高的铆接可靠性,必须要确保制孔的质量。因此精确制孔对于现代大飞机的制造和装配具有至关重要的作用。过去常采用人工方式进行制孔加工。而人工制孔受操作员的经验与身体状态的影响存在精度不高、效率低、稳定性差等不足。为了满足我国航空航天产品安全批产的迫切需求,解决手工制孔效率低、一致性差等问题,引入自动化制孔装备已经成为提高装配质量及飞机寿命的一个重要途径[1]。为此,国内对应用于飞机制造装配领域的自动化制孔设备展开了相应的研究。李芳昕等设计开发了基于Twincat的移动机器人制孔系统,可通过交互控制实现多工位切换,从而提高设备的自动化以及制孔效率[2]。冰峰等针对机翼蒙皮自动制孔研制了一套基于PMAC的柔性导轨制孔设备控制系统, 实现群孔加工[3]。张云志等以C919翼盒装配自动制孔为目标,介绍了一种翼盒机器人制孔系统和便携式螺旋轨迹制孔装置[4-5]。朱前成等提出了一种基于双目视觉定位的机器人自动制孔方法,实现制孔对象在机器人自动制孔工位快速自动流转的同时保证制孔精度,从而解决了传统机器人自动制孔系统在自动化生产线中适应性的问题[6]。
虽然国内对此已有不少的研究,但基本上都是面向大型国有企业的。当前国内民营航空制造企业,例如浙江西子航空工业有限公司,还是以人工制孔为主。因此研制面向民营航空制造企业的低成本的自动化制孔系统对未来我国航空制造业的发展具有长远的实际和战略意义。
本文以飞机起落架舱的自动制孔加工为目标,和浙江西子航空工业有限公司联合研制了一种基于分数阶PID控制的自动制孔系统。该系统制造成本低于机械臂制孔系统。无须专业轨道,可直接安装在已有的夹具上,所以安装简单方便。此外,因多钻头同时工作,制孔效率高于机械臂制孔系统和轨道式制孔系统。
1起落架舱组件的制孔工艺
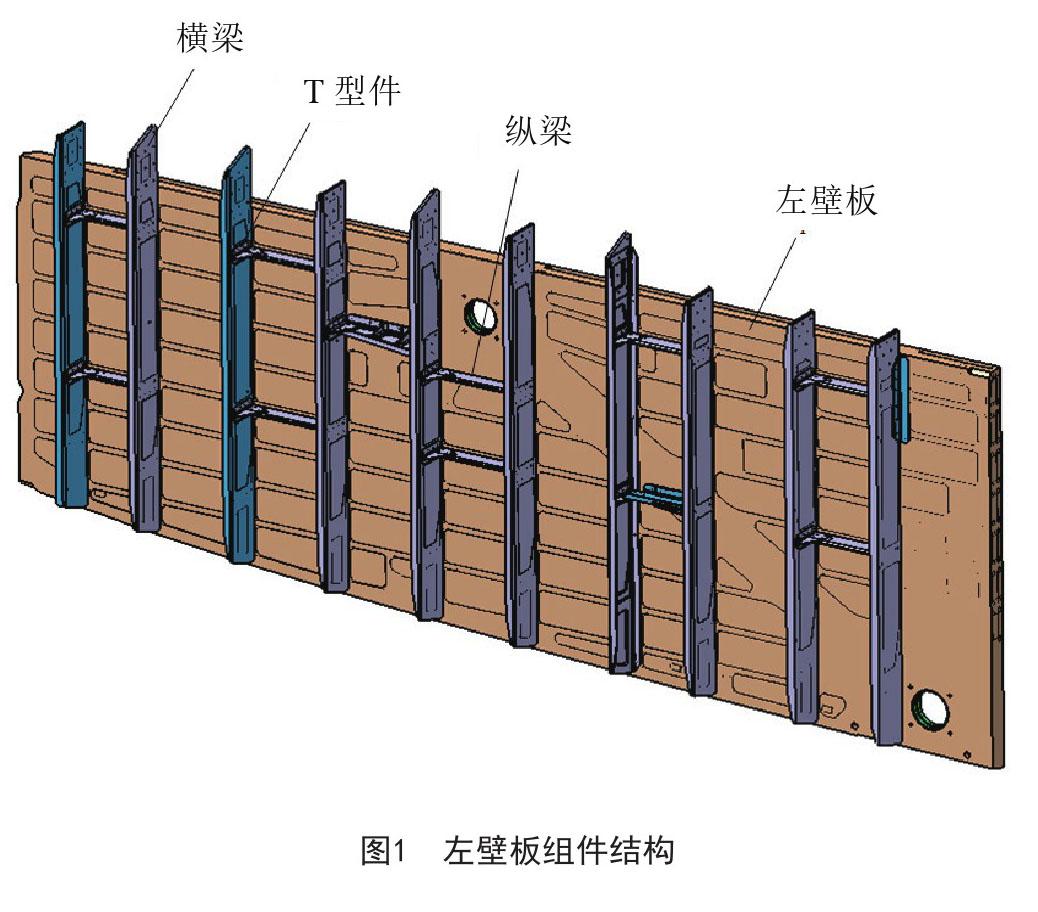
起落架舱是飞机上的一个重要部件,由前壁板组件、后壁板组件、左壁板组件、右壁板组件以及上壁板组件等组成。以下以左壁板组件为例分析其制孔工艺。左壁板组件由左壁板、纵梁、横梁和T型件等组成。左壁板组件结构如图1所示。左壁板组件的钻孔工艺描述如图2:
2飞机起落架舱组件制孔系统设计
飞机起落架舱组件制孔系统主要由机械执行系统和控制系统两部分组成。
2.1 机械执行系统设计
机械执行系统主要由制孔执行单元、伺服运动单元,以及一些辅助设备组成。制孔执行单元具备压紧工件、高效钻孔等功能;伺服运动单元实现快速精确的定位和进给。机械执行系统的硬件组成和3D造型分别如图3和4所示。
在制孔执行单元中,钻削制孔功能主要由一部最高转速可达24000r/min的电主轴完成,该转速可以满足飞机制孔中大多數场合的需要。每个伺服运动单元具有X、Y、Z轴3个方向的自由度,共使用了3台伺服电机提供动力。高精度的伺服运动单元,为定位精度以及重复定位精度的提高,提供了一个重要的必要条件。运动的导向通过丝杆螺母机构和滚珠导轨机构实现。辅助设备主要负责支持整套设备功能的实现,提高设备的加工精度。如支撑固定单元作为整个系统的平台为系统稳定工作提供保障,光栅位移传感器提供钻头的位置信息等。
2.2 控制系统设计
整个系统的控制中心是PLC。PLC控制器可以发出各类指令命令,协调控制横向运动组件、纵向运动组件和钻孔运动组件,实现各种操作,如运动钻头到指定位置、钻头进退、钻头启停等。PLC控制器与各组件之间的通讯通过I/O端口实现,具备数字量与模拟量的输入输出能力。PLC控制器通过调节0-10V模拟量自动改变伺服电机的钻速,进而实现钻头主轴的调速。伺服电机由伺服驱动器直接控制,PLC控制器可以通过发送±10V的模拟量信号来控制伺服驱动器。利用伺服电机内部的编码器反馈,每个伺服运动都可以实现半闭环控制。或利用光栅位移传感器反馈,这样每个伺服运动可以实现全闭环控制,可以进一步提高运动精度。
制孔工艺过程为:首先设定钻速和启动钻头旋转;然后控制运动单元使钻头运动到制孔位置;最后控制钻头进行钻孔。
3关键技术应用
3.1 分数阶PID控制
为了实现高精度的控制,本文采用分数阶PID控制。因为加工环境的不定性,会导致系统的稳定性不够。而分数阶PID控制器比传统PID控制多两个参数,即积分阶次λ和微分阶次μ。因此,其控制效果和鲁棒性均有了很大提高。
3.2 粒子群算法
分数阶PID控制的性能取决于其参数的选择。常规的试错法往往不能获得较佳的参数设置。因此本文选择利用粒子群优化算法对分数阶PID控制的五个参数进行整定优化以实现最佳的控制性能。粒子群算法是一种随机搜索方法,因其实现容易、精度高、收敛快,所以利用粒子群算法可以很快地获得较佳的参数组合。
4结束语
通过分析飞机起落架舱组件的制孔工艺,本文设计一种面向飞机起落架舱的自动化制孔系统。为实现其功能,从机械结构和电气控制两方面对制孔系统进行设计。机械执行系统主要由制孔执行单元、伺服运动单元以及辅助设备组成。伺服运动单元由伺服电机、滚动导轨和丝杆螺母机构组成,这样利于实现自动化控制以及高精度的运动。为了提高控制系统对钻头定位的控制性能,本文采用基于粒子群算法的分数阶PID控制器。分数阶PID控制器的参数选择范围大于传统的PID控制器,且具有更好的鲁棒性。利用粒子群算法对分数阶PID控制器的参数进行整定,可以获得更好的参数组合。
参考文献
[1] 薛宏,罗群,刘博锋,等. 大飞机活动翼面机器人自动制孔应用研究[J]. 航空制造技术,2019,62(19):86-91.
[2] 李芳昕,李超,梁世盛,等. 基于Twincat的移动机器人制孔系统[J]. 制造技术与机床,2017,(3):34-38.
[3] 冰峰,胡永祥,姚振强. 基于PMAC的柔性导轨制孔设备控制系统研制[J]. 航空制造技术,2013,(5):71-76.
[4] 张云志,蒋倩. 大飞机翼盒机器人制孔系统集成技术研究[J]. 航空制造技术,2018,61(7):16-23.
[5] 张云志,刘华东,刘建东,等. 便携式螺旋轨迹制孔装置的研制[J]. 航空制造技术,2018,61(13):47-53.
[6] 朱前成,赛音,熊珍琦,等. 基于双目视觉定位的机器人自动制孔系统研究[J]. 航空制造技术,2019,(3):37-41.
作者简介
周向阳(1970-),男,浙江杭州;毕业院校:杭州电子科技大学,专业:机械设计与制造,学历:本科,高工,现就职单位:杭州职业技术学院,研究方向:机械设计与制造,自动化控制。
胡迪锋(1984-),男,浙江慈溪;毕业院校:香港理工大学,专业:机械工程,学历:硕士研究生,现就职单位:杭州职业技术学院,研究方向:优化控制及算法,机电产品设计。
