降阶线性自抗扰控制器的仿真分析
2020-03-24王福豹
王福豹
(华北电力大学,北京102206)
自抗扰控制器将模型的内部不确定性和外部扰动统一看为广义扰动[1],并利用扩张状态观测器和反馈控制器对广义扰动进行实时估计和补偿[2,3],因此具有良好的跟踪和抗扰性能。线性自抗扰控制器作为自抗扰控制器的线性版本,参数整定更加方便,更易于工程应用[4]。另外由于对象的输出信号y 可以直接获取,因此扩张状态观测器无需对y 进行二次估计,这就是降阶线性自抗扰控制器[5](RLADRC)。本文通过运动控制试验台的仿真试验,对比分析RLADRC 和LADRC 的控制性能。
1 基于降阶观测器的线性自抗扰控制器(RLADRC)
综合考虑结构的简便及控制的有效性,本文研究二阶的RLADRC,其形式如(1):

其中,y 是对象的输出,u 是对象的输入,b 是对象的高频增益,f 是广义扰动,它包含的系统内部的不确定性和外部的扰动。二阶RLADRC 的结构如图1 所示。

图1 RLADRC 结构图
在该结构中,核心思想是估计未知的广义扰动f,假设f 是可微的,则式(1)可以用以下状态空间形式表达:

RESO[5]建立如下:


其中,r 为参考输入。控制器增益k1,k2亦采用极点配置方法获得,即k1=wc2,k2=2wc,其中wc为控制器带宽。
2 仿真模型建立
本文考虑如下的运动控制模型[6]:

其中,y 为输出,u 为输入,Td为扰动。
建立二阶RLADRC 仿真控制模型如图2 所示。
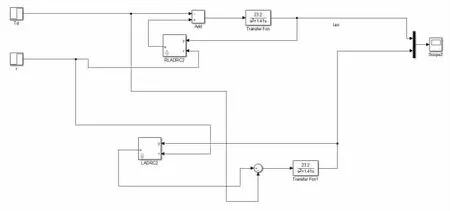
图2 二阶RLADRC 仿真模型
图中r 为参考输入信号,Td为扰动输入,RLADRC 为封装二阶降阶自抗扰控制器,LADRC 为封装二阶自抗扰控制器,控制参数有三个,分别为b,wc,wo。
3 仿真结果分析
在t=1s 时,给定输入信号r 为单位阶跃信号,t=0.8s 时,给定输入扰动信号Td为幅值为2 的阶跃信号,控制器参数选取为:b=40,wc=150,wo=40。仿真结果如图3 所示。
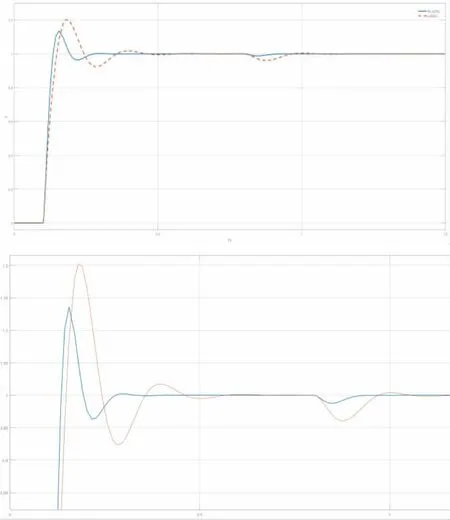
图3 闭环系统输出响应
从图3 可以看出,在跟踪性能上,RLADRC 较LADRC 的超调量更小,调节时间更短,而且动作时间更超前,因此,前者具有更好的跟踪性能;在抗扰性能上,RLADRC 较LADRC 受扰动影响更小,且能更快的是系统达到稳定,故前者具有更好的扰动性能。
结束语
本文通过RLADRC 和LADRC 在同一运动控制对象上的对比试验,验证了RLADRC 较LADRC 具备更好的跟踪和抗扰性能,说明前者在结构上有一定优越性。
