基于PID控制算法的直流微网容错控制方法研究
2020-03-10,,,,,
,,,,,
(国网浙江嘉兴供电公司,浙江 嘉兴 314033)
0 引言
直流微网系统在实现电网输出转换和电力调度中发挥着重要作用,但由于直流微网输出具有非线性的特点,导致直流微网的输出容错性能较差[1],需要进行直流微网的容错控制设计,提高直流微网的输出稳定性。研究直流微网的容错控制技术,在进行直流微网的优化组网设计和自适应电力调度中发挥重要作用,相关的直流微网的控制技术研究受到人们的极大关注。
目前,对直流微网的控制技术是建立在直流微网的参数调节基础上,建立直流微网的自适应参数调度模型。
针对传统方法[2-6]的相关问题,在此提出基于PID控制算法的直流微网容错控制方法。首先构建直流微网容错控制对象模型和约束参量模型,在不同电网强度下调节直流微网容错控制参数,采用无功环比例积分控制方法进行直流微网容错寻优分析,结合模糊PID控制方法,实现直流微网的优化控制,最后进行仿真实验分析,得出有效性结论。
1 直流微网容错控制约束参量分析
1.1 直流微电网的输出回路参数调节
为了实现直流微网容错控制,需要首先构建直流微网容错控制对象模型,以输出功率、直流微网的参考电压、弱电网下系统惯性响应特征等为约束参量,进行控制对象模型分析[7],采用惯量特性以及频率响应的前馈解耦调节方法,直流微网容错控制对象模型表示为
(1)
(2)

(3)
根据微电网自身输出阻抗特性[8],进行直流微电网的输出回路参数调节,调节方程为
(4)
根据上述公式,建立不同频率系统间的直流微电网的多功率参数调节和耦合模型,进行直流微网容错控制目标函数构建,在不同电网强度进行直流微网容错控制设计。
1.2 微电网控制整体参数优化调节
为了实现直流微网的容错控制,以输出功率、直流微网的参考电压、弱电网下系统惯性响应特征等为约束参量[9],结合1.1节中的输出回路参数,得到微电网整体控制对象模型为
(5)
UQ为直流微网的可控电压源;UJ为直流微网的偏置电压;UE为直流微网的高压侧电压。直流微网容错性控制的模糊约束特征量为
Δv(l)=LQΔf(l)+v(u)LJf(l)+
LE[Δf(l)-Δf(l-1)]
(6)
LQ为并网点电压的谐波特征分量;LJ为直流微网容错性控制的波动频率;LE为微分参数增加虚拟阻尼电阻。采用变结构的PID控制器,进行直流微网的容错控制过程中的输出状态参数调节[10]。输出平均功率变化率f,计算直流微网的直流控制变量,模型表示为
(7)
G11,G12,G21和G22分别代表输出功率、参考电压、系统惯性响应特征和容错特征。
由此得到具有随机波动性的微电网控制整体参数调节方程为
(8)
v为混合双馈入直流输入信号;x1为相位和角频率的联合控制信号;x2为输入信号;h为直流微电网控制的步长。采用外环和电流内环的联合参数调节方法,得到直流多功率增益调节因子为h0,当h值不变且输入电压稳定时,得到微电网控制的最优参数,进行直流微网的多功率稳态调节,在不同电网强度下进行直流微网容错控制的参数自整定性调节,采用无功环比例积分控制方法进行直流微网容错学习[11]。
2 控制算法的优化设计
2.1 直流微网容错学习
在上述构建直流微网容错控制对象模型和约束参量模型的基础上,进行控制算法的优化设计,本文提出基于PID控制算法的直流微网容错控制方法,直流微电网的输出功率和参考电压的联合参数优化模型为
(9)
z1,z2为最大功率点因素;y为容错控制的输出功率增益;z3为相关状态变量;β1,β2,β3,δ,b为可调参数。采用混合双馈入直流调节的方法,进行微电网控制系统的状态调节,计算单个换流变容量,进行直流微网的容错控制的模糊评价和自适应调度[12],得到交流系统参数学习模型为
(10)
α1,α2,δ1,δ2,b0均为修正后的直流微电网优化控制系数;kP,kD分别为比例系数和微分系数。
对直流微网控制约束参量模型进行误差反馈跟踪融合处理得到误差控制项为:
Llx=(1-k2)L11
(11)
Lmx=k2L11
(12)
(13)
Llx,Lmx和Lnx分别表示误差区馈跟踪融合处理的3种误差控制项;k2为控制系数;L11和L22分别表示直流微网容错控制的误差基数。采用自适应PID学习方法,进行微电网输出控制的加权学习[13-14],得到优化的微电网输出相位信息和阻抗信息为:
(14)
(15)
w0为优化的微电网输出相位信息;Cx为微电网输出控制加权系数;Z0为阻抗;w0为直流微网容错控制调节值。由此实现了利用直流微网容错学习得到的微电网输出参数优化,为变结构PID优化控制提供基础。
2.2 变结构PID控制优化
在不同电网强度下进行直流微网容错控制的参数自整定性调节,采用无功环比例积分控制方法进行直流微网容错调节,建立变结构PID控制模型,如图1所示。
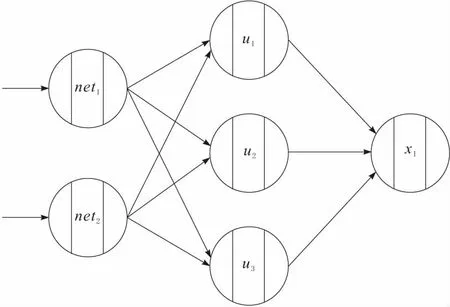
图1 变结构PID控制结构模型
net1,net2分别表示变结构PID控制结构对应绕组;u1,u2,u3分别表示三相绕组间电压;x1表示变结构PID控制结构绕组感应值。根据图1所示的变结构PID控制模型,进行直流微网直流多功率参数调节和容错性控制[15],得到优化的控制约束参量为:
(16)

采用变结构的模糊PID控制方法进行直流微网容错控制过程中的自适应加权学习,加权系数满足Gm(s)=G0(s),tm=τ,误差反馈调节函数为
H(s)=Gm(s)U(s)×Ipri
(17)
Gm(s)为转动惯量;U(s)为所受粘性阻尼系数。采用PID控制方法,得到直流微网数据输入层满足
(18)
Gc(s)为饱和补偿系数;G0(s)为直流微网数据输入层补偿因子。PID控制下的输出层为
(19)
Lm为PID控制下的输出层基数。根据输入层与输出层之间的稳定运行状态差异性特征,进行容错性调节,实现直流微网容错控制改进设计。
3 仿真实验与结果分析
为了验证本文方法在实现直流微网容错控制中的应用性能,进行仿真实验。实验采用MATLAB进行控制算法设计,设置直流微电网的混合多馈调节系数为0.25,端口电压为300 V,无功环积分增益为0.02,额定直流电压为1 200 V,锁相电流环为1.25 A,PID神经元个数为20,加权系数为0.29,比例积分参数为0.68,根据上述参数设定,进行直流微网容错控制仿真分析,得出微电网的输出阻抗和电压波德图如图2所示。

图2 微电网的输出阻抗和电压波德图
分析图2得知,采用本文方法进行直流微网容错控制的输出稳定性较好,阻抗增益较大,设置电网等效电感0.25 mH,测试不同电网强度下的容错性能,得到收敛性曲线如图3所示。

图3 容错性能测试
分析图3得知,采用本文方法进行直流微网控制的容错性能较好,控制效果较好,具有很好的收敛性和鲁棒性。将其与文献[5]和文献[6]方法对比,进一步测试输出增益,得到对比结果如表1所示。分析表1得知,通过对直流微网容错控制,提高了输出增益。
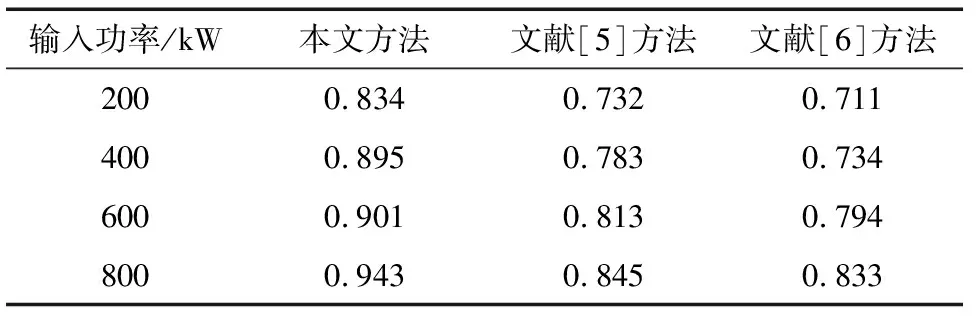
表1 输出增益测试对比
4 结束语
针对直流微网容错控制效果不佳,质量未达到直流微网容错要求的状况,本文提出并设计基于PID控制算法的直流微网容错控制方法,提高直流微网的输出稳定性,构建直流微网容错控制对象模型,根据微电网自身输出阻抗特性,进行直流微电网的输出回路参数调节,构建不同频率系统间相互耦合器,以满足实际需要。采用无功环比例积分控制方法进行直流微网容错调节,建立变结构PID控制模型,实现直流微网容错控制改进设计。研究得知,本文方法进行直流微网控制的输出增益较好,容错性较强,控制效果较好,符合直流微网容错要求,为实际的直流微网容错控制提供有力的数据参考,具有重要的意义。在未来的研究中,可以就如何减少直流微网容错控制时间和降低容错率等方法进行更加深入的研究。
