红外偏振舰船目标自适应尺度局部对比度检测
2020-03-07吕俊伟仇荣超
宫 剑,吕俊伟,刘 亮,仇荣超,孙 超
(1.海军航空大学,山东 烟台 264000;2.中国人民解放军92337部队,辽宁 大连 116023;3.中国人民解放军91104部队,江苏 南京 210000)
1 引 言
基于前视红外检测舰船目标现已广泛应用于侦查预警及探测制导等军事领域[1]。红外偏振信息是一种独立于强度信息的另一维度信息,其作为一种新的探测手段有着较大的应用前景[2]。红外成像依据目标背景间温度差异成像,突出表现目标轮廓等低频信息;红外偏振成像依据目标与背景的红外偏振特征差异成像,突出表现目标边缘和细节等高频信息,融合强度信息和偏振信息有效利用各自信道有利信息进行互补。图像频域分解,再通过一定规则融合是红外偏振图像融合的常见方法,Zhang等[3-4]根据对强度图像和偏振图像的频率域分析,提出一种非下采样剪切波变换(Non-Subsampled Shearlet Transform, NSST)方法,通过构建频域映射函数融合图像。陈伟力等[5]提出一种基于小波包(Wavelet Packet, WP)的红外偏振图像与强度图像融合方法。由于非弱小目标有着丰富的轮廓和细节信息,检测相对容易,目前研究主要集中在弱小目标检测方面。根据结构张量(Structure Tensor, ST)对不同局部结构的表示特性,赵高鹏等[6]提出应用结构张量特征值矩阵得到响应图,通过高斯差分带通滤波器和自适应阈值分割得到目标位置。受到人视觉系统对比度机制启发,Chen等[7]提出一种基于局部对比度的红外小目标检测方法,在小目标尺度变化及杂波背景条件下,该方法鲁棒性较强。针对复杂背景下实时检测红外舰船目标需求,漆昇翔等[8-9]设计了一种小面卷积核(Facet Kernel, FK)确定目标区域,通过L0梯度最小化滤波分割目标。
在红外偏振图像中,高频信息中的边缘与海杂波、噪声等干扰混叠,频域分解难度较大,且如何准确检测图像尺寸差异较大舰船目标也是亟待解决的问题。为此,本文提出一种基于引导滤波的方法通过融合强度信息抑制海杂波和噪声影响,根据目标与海天线的几何关系,应用海天线加权方法抑制较强海杂波干扰,最后提出一种自适应尺度局部对比度方法检测舰船目标。
2 红外偏振图像及红外强度图像分析
2.1 偏振态数学表示
任意偏振态可以用斯托克斯(Stokes)矢量进行表达[10],Stokes矢量是一个4×1的矩阵定义为:
S=[IQUV]T,
(1)
其中:I表示辐射强度,Q表示水平和垂直线性偏振成分,U表示+45°和-45°偏振成分,V表示右旋或左旋偏振成分,在自然场景下,通常忽略该分量。任意偏振态可以用4个斯托克斯参量进行描述。

So=M·Si,
(2)
其中:M表示偏振片的Muller矩阵。因此,成像传感器接收到的辐射强度为:
I=M11Ii+M12Qi+M13Ui+M14Vi.
(3)
线栅偏振片的Muller矩阵可以定义为:
(4)
其中,θ表示偏振光方向与偏振片透光轴的夹角,则可以得到光强I与Stokes参量关系表达式[11],见式(5):
(5)
由此可以得到偏振光Stokes参量可以通过4个偏振角度强度图像表示,如式(6)所示:
(6)
最终,根据式(6)得到偏振度图像计算方法,见式(7):
(7)
2.2 红外偏振及强度图像特性分析
物体反射辐射偏振态与物体材料,粗糙程度,入射角及出射角等因素密切相关[1],在海浪较小情况下,海面较光滑属于高偏振特征物体,实际采集的偏振度图像海面灰度较高,而舰船目标灰度较低,这与红外强度图像中的灰度特征相反,为了统一目标与背景灰度特征,根据式(8)将偏振度图像灰度进行反转。图2分别为4个场景下的红外图像和红外偏振图像。根据图2可以得到,与红外图像相比,偏振图像目标与海天线边缘更清晰,但与此同时偏振图像中海浪纹理较为复杂,偏振图像受海杂波影响较为严重且易受到噪声影响。根据式(9)和式(10)计算得到不同场景下红外强度图像和红外偏振图像的目标背景局部对比度(Local Contrast, LC)及局部信杂比 (Local Signal-to-Clutter Ratio, LSCR),见式(9),式(10)。


图2 不同场景下的红外图像和红外偏振图像
(8)
(9)
(10)
式中:μT为目标区域灰度均值,μB为背景区域灰度均值,σB为背景区域灰度标准差,红外图像与偏振图像客观评价见表1。根据表1,红外强度图像的目标背景对比度低于红外偏振图像,但由于海杂波及噪声等影响,红外偏振图像局部信杂比低于强度图像。
表1 不同场景下红外图像与红外偏振图像客观评价
Tab.1 Objective evaluation index of infrared images and infrared polarization images in different scenes
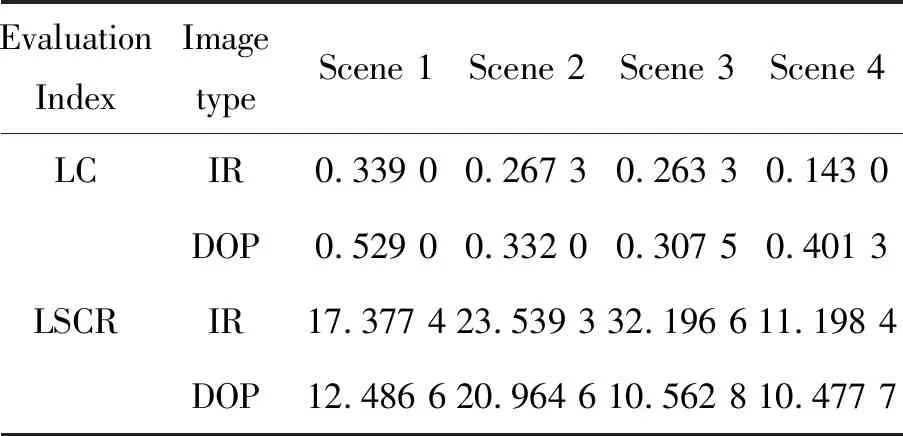
Evaluation IndexImage typeScene 1Scene 2Scene 3Scene 4LCIR0.339 00.267 30.263 30.143 0DOP0.529 00.332 00.307 50.401 3LSCRIR17.377 423.539 332.196 611.198 4DOP12.486 620.964 610.562 810.477 7
3 舰船目标检测流程
3.1 引导滤波
根据对图2与表1可以得到,红外强度图像信噪比较高而目标背景对比度较低,红外偏振图像虽然目标背景对比度较高,但是由于海杂波及噪声等影响导致信噪比较低,传统的均值滤波,中值滤波,高斯滤波器等是各向同性滤波器,在消除噪声的同时丢失了部分目标边缘和纹理信息。引导滤波是由He提出的一种简单可靠的边缘保持滤波器[12],引导滤波假定引导图像和待滤波图像在二维滤波窗口中满足线性关系,当引导图像出现边缘,输出结果就会出现边缘。根据式(6)和式(7)可知,在采集红外偏振图像的同时也得到了红外图像,与红外偏振图像相比,红外图像有着较高的信噪比,受噪声和海杂波影响较小,利用红外图像中目标背景的梯度信息作为引导图像对偏振图像滤波,滤除海杂波和噪声影响,得到的滤波图像也就是红外强度信息和偏振信息的融合图像,在保留红外强度图像高信噪比的同时融合了红外偏振图像高目标背景对比度的特征。
引导滤波器包括输入图像DOP,引导图像IR,输出图像RH,其表达式为:
RH=ak·IR+bk,∀i∈ωk,
(11)
式中:ωk为一个半径为r的正方形窗口,系数ak与bk为常数,可用过线性回归求出,即:
(12)

由于像点i包含在若干不同的窗口ωk中,故式(11)中滤波输出RHi会随着窗口ωk的变化而改变,通过取均值解决该问题,因此改写式(11)为:
(13)

3.2 海天线距离加权
海天线检测是前视图像研究热点之一,海天线检测不仅有利于海天场景分割,也对抑制海面杂波干扰有较大意义。根据图2场景一、二中红外偏振图像,海杂波在距离海天线较远时影响较大,在靠近海天线附近海杂波不明显,由此设计一种海天线距离加权算法抑制海杂波对目标检测带来的影响。文献[13]基于梯度显著性方法增强海天线直线特征同时抑制干扰,采取区域生长算法检测海天线。文献[14]提出一种结合链码跟踪与相位验证的直线检测方法,有效克服由于噪声和相位编组导致的直线断裂问题。引导滤波图像融合了海天背景的红外强度特征和红外偏振特征,海天线垂直梯度显著,根据这一特点提出一种简单高效的海天线检测算法。
对于前视图像而言,理想状态下海天线应为水平线,而在实际过程中,可以根据采集系统姿态数据将倾斜海天线图像校正至水平。海面和天空有着较大温度差异和偏振特征差异,因此海天线有着显著的垂直梯度特征。首先,应用梯度显著性增强模板G对图像进行卷积处理,增强垂直方向上边缘区域,即海天线边缘。假设校正后海天线倾角θ,若图像尺寸为M×N,海天线窗口尺寸为(Ntanθ)×N。自上而下滑动窗口,计算每个窗口梯度显著性图像灰度值,灰度值最大窗口即视为海天线窗口,对窗口中的直线进行拟合得到海天线结果。最后,根据图像每个像素与海天线的行向量距离进行加权。
对于前视图像而言,理想状态下海天线应为水平线,而在实际过程中,可以根据采集系统姿态数据将倾斜海天线图像校正至水平。海面和天空有着较大温度差异和偏振特征差异,因此海天线有着显著的垂直梯度特征。
Step 1 应用梯度显著性增强模板G对图像进行卷积处理,增强垂直方向上边缘区域,即海天线边缘。
G=
(14)
Step 2 假设采集系统姿态校正后海天线倾角θ,图像尺寸为M×N,海天线窗口尺寸为(Ntanθ)×N。自上而下滑动窗口,计算每个窗口梯度显著性图像灰度值,灰度值最大窗口则为海天线窗口,对窗口中的直线进行拟合得到海天线结果,如式(15)所示。
L=aLx+bL.
(15)
Step 3 根据图像每个像素与海天线的行向量距离进行加权,见式(16):
(16)
其中:T(i,j)=|j-L(i)|i∈N,j∈M,i,j分别为图像的行和列,T(i,j)为加权模板,RH′表示加权后融合图像。
3.3 自适应尺度局部对比度
3.3.1 单一尺度局部对比度
红外图像和红外偏振图像目标细节较少,无法像可见光图像一样通过细节特征检测目标,特别是弱小目标。红外图像和红外偏振图像表现目标背景的辐射和偏振特性差异,目标与背景对比度差异较大而细节特征较少,应用局部对比度是检测红外目标的有效方法之一[7],Chen 提出一种基于人类视觉感知局部对比度检测的弱小目标方法。
图3为局部对比度检测算法图,u表示目标区域,v表示局部背景区域,w表示整幅图像。将u,v组成的滑动窗口分为9个单元,中心单元“0”表示目标可能出现区域。首先,计算区域中心“0”单元的最大像素值:
(17)

(18)

图3 局部对比度检测算法

(19)
用Cn表示滑动窗口中心单元“0” 像素灰度值。在整幅图像w滑动窗口重复上述过程,最终得到原图像的局部对比图C。
3.3.2 自适应尺度局部对比度
对于目标而言,其尺度不是固定不变的,文献[7]在算法基础上提出多尺度局部对比度方法,计算不同尺度下的局部对比图,取局部对比度最大值作为目标检测区域。该方法具有尺度不变性,适用于尺度不同的小目标检测,但随着尺度增大,计算量随之变大,而且当图像中同时存在尺度大小差异较大的目标时尺度选择困难,本文提出一种自适应尺度局部对比度方法。
对于前视红外图像中的舰船目标,远距离弱小目标一般为点状,无清晰轮廓,而近距离舰船目标通常具备一定轮廓特征。如图4,通过对前视图像舰船目标进行分析,其长宽比约在1∶4(侧视图)至1∶1(正视图)范围变化,由此设计自适应尺度局部对比度方法。


图4 舰船目标侧视图与正视图
Step 1 假设图像中舰船目标尺寸大于3×3,则局部对比度模板尺寸为9×9。对图像按尺度rn进行变换,rn如式(20)所示,其中n表示尺度数:
(20)

Step 2 根据单一尺度局部对比度算法计算尺度rn下局部对比度图,根据式(21)对尺度rn下局部对比度图进行分割,得到分割图像Trn,统计分割图像Trn中目标区域数量tn。
Trn=Irn+k×σIrn,
(21)
其中:Irn,σIrn分别表示尺度rn下局部对比度图的均值和标准差,k为分割系数。
Step 3 当局部对比度处理区域小于尺度n中的目标时,部分目标像素被当做背景参与背景平均强度brn(i,j) 计算,在进行阈值分割后目标整体的局部对比度图被分割为多个部分,造成该尺度局部对比度的误差;当局部对比度处理区域与尺度n中的目标相同时,局部对比度能够准确地量化该尺度下红外目标,此时局部对比度响应最大。计算尺度rn+1局部对比度图重复Step 2,统计分割图像Trn+1中目标区域数量tn+1,若tn+1≠tn则重复Step 3,若tn+1=tn,则尺度rn为最大尺度,进行下一步。
Step 4 根据式(22)计算每个尺度下局部对比度图的各行各列的最大值作为最终局部对比度图,根据式(21)分割得到舰船目标。
(22)

4 实验结果与分析
本文实验仿真平台采用CORE i5-6200U 主频2.3 GHz,内存16 G的笔记本电脑。实验参数设置如下:引导滤波的滤波半径r为9,权重因子ε为0.01;海天线倾角θ=5°;分割系数k为7,图像大小为512 pixel×640 pixel。
为验证本文所提方法能否抑制红外偏振度图像中的噪声及海杂波干扰,最大限度利用偏振信息和强度信息,本文对采集的图像中选择4组进行对比实验。不同角度偏振图像经过严格配准,将本文所提融合方法与文献[3]和文献[5]提出的方法进行对比,图5为文献[3]和文献[5]方法,图6为本文引导滤波融合结果。选择LC,LSCR作为客观评价指标评价融合图像,表2为不同融合算法评价结果。通过对比表1,2中评价指标,WP算法和NSST算法局部对比度较强度图像和偏振图像提升有限,而局部信杂比下降明显,本文方法在提高图像目标背景对比度的同时提高了图像局部信杂比,有效抑制海杂波和噪声等干扰,增大目标背景差异,与WP算法、NSST算法相比,目标背景对比度分别提高77.21%,55.35%局部信杂比分别提高94.63%,83.16%。可以看出,由于频域分解融合方法中的高频分解无法区分红外偏振图像中的高频噪声和海杂波干扰和高频轮廓细节,导致NSST方法和WP方法融合偏振信息和强度信息的同时将噪声和海杂波等干扰也融合到图像之中,造成图像质量较差。引导滤波方法充分利用了目标与背景的强度信息和偏振信息,使得融合图像有效抑制了海杂波和噪声干扰同时保持高对比度特征。


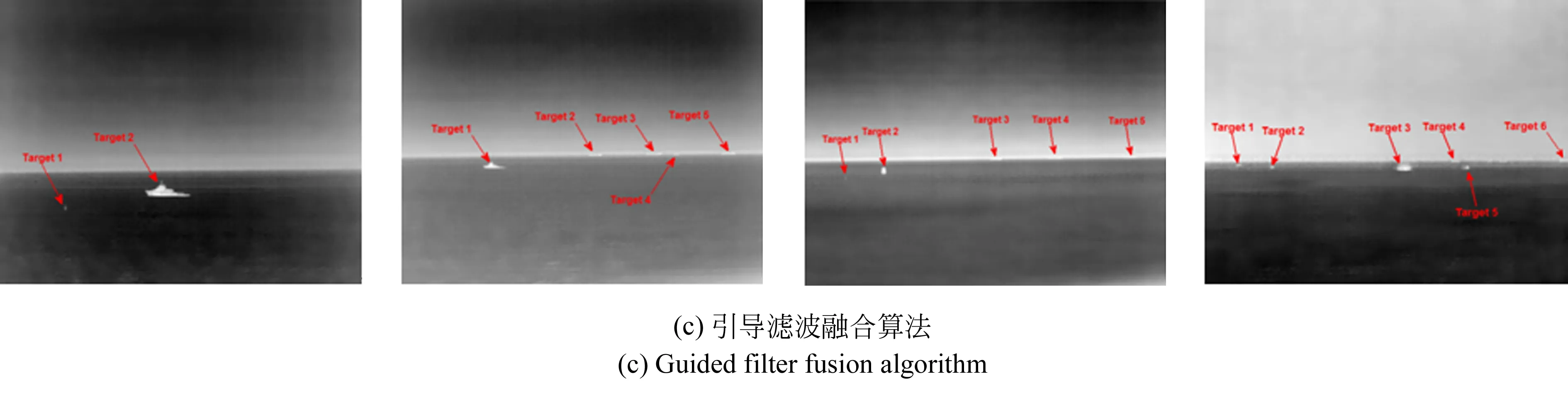
图5 文献融合方法与本文方法对比

表2 融合图像客观评价指标
图6为海天线加权对自适应尺度局部对比度检测效果影响实验图(彩图见期刊电子版),其中图6(a)~图6(d)与图6(e)~图6(h)分别为未经海天线加权处理和经过海天线加权后的自适应尺度局部对比度检测结果。根据对图6对比分析,以红外图像作为引导图像对红外偏振图像滤波抑制了大部分海杂波及噪声干扰,但由于红外图像下方,即距离图像采集较近区域海杂波较为显著,海天线加权方法可以抑制海杂波,如图6(d)中黄色圈所示。海天线加权在抑制海杂波的同时增加海天线附近对比度,增加算法检测精度,避免如图6(b)和图6(c)中的目标漏检情况。


图6 海天线加权方法对自适应尺度局部对比度算法检测结果影响
为进一步验证本文所提出的海天线加权及自适应尺度局部对比度方法在检测不同尺度舰船目标的有效性,将本文算法与LCM,ST,FK算法进行比较,实验结果如图7所示。如图7可以看出:LCM算法(如图7(a)~图7(d))适合在海杂波及噪声干扰较小情况下检测小目标,如图7(a)中的浮标(即图5(a)中的Target1),图(d)中远处的小船(即图5(d)中的Target5,Target6)较为显著,而作为较大尺寸的舰船目标(即图6(a)中的Target 2)并不明显,在如图7(b)、图7(c) 海杂波和噪声干扰较大情况下,虚警率较高,检测效果差;ST算法(如图8(e)~图8(h))对噪声及海杂波有一定的鲁棒性,但在目标尺度差距较大情况下,ST算法检测小尺度目标较为困难,如图8(e),且易受到海天线干扰,影响检测结果,如图8(g);FK算法(如图8(i)~图8(l))对尺寸差异较大目标有较好的响应效果,但由于易受到海杂波和噪声干扰导致检测效果不理想;本文算法(如图8(m)~图8(p))有效地抑制海杂波和噪声等干扰,对于目标尺度差异较大(例如图6(a)中Target1,Target2),弱小目标(如图6(c)中的Target3,Target4,Target5)等情况都有较好的效果。
SPIE将小于图像总面积0.12%定义为小目标[16],本文将红外偏振系统采集的180组海天场景图像中共计397个舰船目标分为小目标(像素小于18×18,共计273个)和非小目标(像素大于等于18×18,共计124个)。分别应用局部对比度算法,结构张量算法,小面核算法与本文算法检测舰船目标,实验结果见表3。根据实验结果可以得到,由于舰船目标大小由2×2到大于18×18,尺度变化范围较大,LCM算法在受到较强海杂波干扰及检测大尺度目标时虚警概率较高,ST算法在目标尺度变化范围较大情况下对小目标检测效果较差,FK算法由于受到海天线影响在检测海天线附近小目标时检测准确率较低,虚警率较高。本文方法目标检测准确率、虚警率分别为95.0%,3.5%,与文献[6-8]方法相比检测准确率率分别提高了15.7%,17.2%,12.1%,虚警率降低了30.8%,7.5%,25.0%,与其他方法相比本文对噪声及海杂波干扰鲁棒性较强,能够准确检测尺度差异较大的舰船目标。

图8 4个场景下的不同算法响应图

表3 不同算法的检测率和虚警率
以上实验针对海天场景为验证本文所提算法对不同场景的舰船目标检测能力,应用红外偏振成像系统采集50组岸岛场景红外偏振图像中的132个舰船目标进行检测,检测结果如表4所示。将表3中的海天场景中的实验结果与岸岛场景实验结果相对比,可以看出在复杂岸岛背景下,文献算法探测准确率下降且虚警率大幅提升,本文算法优于文献算法,但与海天场景相比,岸岛场景下降7.1%,虚警率提高17.6%。由此看出,本文算法更适用于海天场景红外偏振图像舰船目标检测。

表4 岸岛场景检测性能对比
5 结 论
本文针对前视红外偏振图像检测不同尺度舰船目标问题,提出一种基于引导滤波和自适应尺度局部对比度的舰船目标检测方法。首先采用引导滤波方法融合红外强度和偏振信息得到高对比度高信杂比的融合图像,抑制噪声和海杂波干扰;然后利用融合图像的显著海天线梯度特征检测海天线并对图像进行海天线加权,进一步抑制较强海杂波干扰,增强图像;最后根据局部对比度算法和舰船目标比例特征,提出一种自适应尺度局部对比度方法,根据不同尺度局部对比度对目标响应确定最终尺度,并根据各尺度最大响应检测舰船目标。通过实验验证和分析,本文算法与其他经典算法相比,有效解决了检测海天场景舰船目标尺度差异较大,前视红外偏振图像受海杂波和噪声干扰情况下虚警率较高的问题,并提高了检测精度,为红外偏振图像目标识别打下坚实基础。
