水下声学滑翔机研究进展及关键技术
2020-03-06孙芹东兰世泉王文龙
孙芹东, 兰世泉*, 王 超, 王文龙
水下声学滑翔机研究进展及关键技术
孙芹东1, 2, 兰世泉3*, 王 超1, 2, 王文龙1, 2
(1. 海军潜艇学院, 山东 青岛, 266199; 2. 青岛海洋科学与技术试点国家实验室 海洋应用技术联合实验室, 山东 青岛, 266237; 3. 天津大学 机械工程学院, 天津, 300350)
水下声学滑翔机具有大航程、长航时、高隐蔽性及低成本的特点, 是用于水下移动目标探测、海洋水文环境精细化测量的优势平台, 在全球海洋安全与环境观测体系建设中发挥着重要作用。文章详细梳理了国内外水下声学滑翔机研究进展, 简述其系统组成和功能; 探讨了水下声学滑翔机设计及规模化应用涉及的平台减振降噪、自主控制、多模混合推进、声学传感器设计及应用、目标属性自主判别, 以及安全布放与回收等关键技术。文中研究可为国内同类水下无人探测装备的系统开发提供参考。
水下声学滑翔机; 自主探测; 减振降噪; 目标自主判别
0 引言
水下无人平台自主探测技术是水下无人平台完成使命任务的重要保障, 在军事国防领域占有举足轻重的地位, 其研究内容涉及水下无人平台结构与水动力、水下定位与导航、任务自适应规划、自主控制、数据传输与通信、动力推进、任务载荷、目标自主探测与跟踪、目标属性自主判别及共性基础技术等领域, 是当前国际研究的前沿热点。水下声学滑翔机属于水下无人平台自主探测研究领域, 其在环境观测型水下滑翔机技术基础上, 综合考虑了平台电磁兼容性及声学特性, 搭载声学传感器及信号处理系统, 具备海洋环境噪声采集、水声信号采集、声纹记录、数据处理及上浮通信等功能, 可用于完成敏感海域或拒止区域移动目标自主探测、跟踪、属性判别和信息回传等任务。
1 水下声学滑翔机研究现状
1.1 国外研究现状
国外在水下滑翔机集成声学传感器方面起步较早, 且成果显著, 尤以美国最为突出。
2010年5月7日, 葡萄牙科研工作者在西太平洋劳盆地(Lau basin)北部布放搭载水听器的Slocum水下声学滑翔机(见图1), 用于监测西马塔(West Mata)的海下火山, 记录了随距离变化的声波振幅, 证明了地质变化将使该地区噪声水平上升。试验结果表明, 水下声学滑翔机用于水声监测的效果可以与水下自主水听器相媲美[1]; 2013年5月, 葡萄牙阿尔加维大学又在葡萄牙海岸布放了搭载SR-1水听器的Slocum用于探测水下噪声, 结果表明, 其可对水下噪声进行时间和空间尺度上的有效探测[2]。

图1 搭载水听器的Slocum
美国研制的Seaglider水下声学滑翔机尾部舱段集成了5 Hz~30 kHz全向声压水听器(见图2), 并配有数据采集与存储设备, 声学设备动态范围120 dB、本底噪声低至34 dB。2006年8月, 科研人员在加利福尼亚州蒙特利湾布放了3台Sea- glider水下声学滑翔机, 共获取401个剖面、107小时的声学数据, 采集到了蓝鲸、座头鲸和抹香鲸的叫声。此次试验航行时间达40天, 航行里程达200 km, 取得了较好的试验效果[3]。
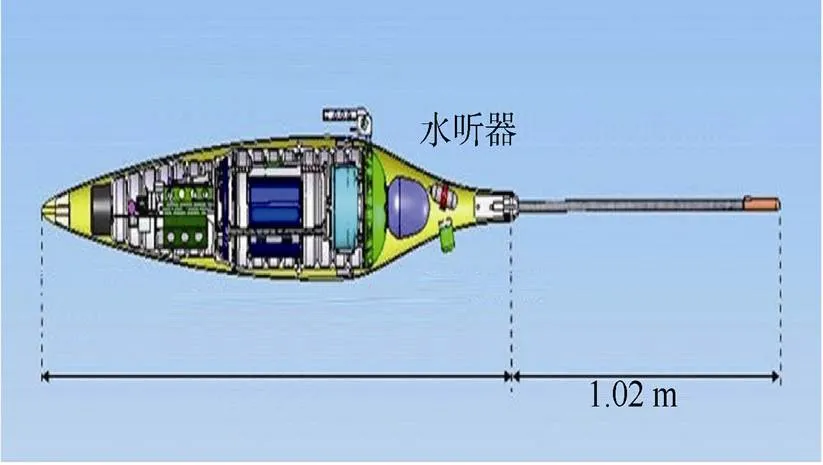
图2 搭载水听器的Seaglider
ANT公司在美国海军研究办公室的资助下研制的一款浅海声学滑翔机ANT Littoral Glider (见图3), 搭载有Reson公司的 TC-4033型水听器和Wilcoxon的矢量水听器, 其独特的设计特别适合在近海工作。在6年的研制周期内, ANT公司共为美国海军制造了18套ANT Littoral Glider,累积作业4 500小时[4]。

图3 ANT公司的浅海滑翔机
美国斯克里普斯海洋研究所海洋物理实验室和华盛顿大学应用物理实验室合作设计的翼身融合水下声学滑翔机 (XRay和ZRay, 见图4)[5], 采用翼身融合结构, 可实现翼展水平距离最大化和功率消耗最小化, 最大限度地提高其探测和定位能力。该滑翔机利用独特的翼身融合设计可获得较快的水下航行速度, 使升力面积最大且增加了内部体积, 可用于携带战术有关的声学传感器, 使其适合于警戒和其他遥测任务[6]。ZRay的两机翼前缘中安装了1个27元水听器阵列, 水听器工作频带10 Hz~15 kHz, 阵列信号输出到1个实时检测/定位和记录系统; 该水下声学滑翔机同时搭载有矢量水听器, 频率为20 Hz ~2 kHz。除此以外, ZRay还尝试拖曳1个32元拖曳线列阵, 该阵列由太平洋空间和海军作战系统中心设计和建造, 并将配备1个来自伍兹霍尔海洋研究所的3通道低(10 Hz~7.5 kHz)、中(100 Hz ~ 50 kHz)、高(1 kHz~160 kHz)频数字监控自主检测分类系统。

图4 Xray和Zray水下声学滑翔器
该水下声学滑翔机可以以1~3 kn的航速续航6个月, 其设计初衷是用来跟踪和自动识别海洋哺乳动物[7], 目前已应用于圣地亚哥海底被动声学自主监测海洋哺乳动物项目(passive acoustic autonomous monitoring of marine mammals program)。由于其优异的声学探测性能, ZRay还可用来探测安静级柴电潜艇, 是美军持久性沿海海底监视网(persistent littoral undersea surveillance net- work, PlusNet)的一部分[8]。
1.2 国内研究现状
国内在水下滑翔机平台集成声学传感器方面基本与美国保持同步。受国家“863”计划资助, 2014 年, 中国海洋大学和中科院声学所联合研制了一型声学滑翔机, 该型滑翔机的艏部舱段为声学探测舱, 电子系统位于滑翔机电子舱内, 二者通过电缆连接, 已先后开展了消声水池、湖上及海上试验(见图5)。
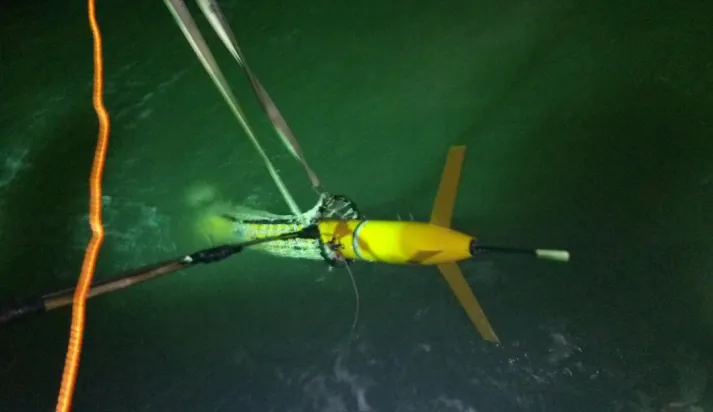
图5 水下滑翔机海上试验
该型滑翔机系统最大工作深度1500 m, 悬停或坐底时, 最低工作频率10 Hz; 滑翔时, 最低工作频率500 Hz。设计指标为:在良好水文条件下, 对水下声源谱级不小于125 dB (@1 kHz)的目标, 单节点探测作用距离不小于3 km[9]。
西北工业大学基于飞翼滑翔机研发了搭载多元声压阵列的飞翼滑翔机声学探测系统, 并进行了湖上测试。哈尔滨工程大学利用“海燕”水下滑翔机共装载了4个声压水听器, 在滑翔机左翼、右翼、前导流罩和尾翼各安装1个水听器构成4元声学感知单元, 并在南海海域进行了海上试验, 利用73 Hz低频声源信号对系统的探测能力进行验证。试验期间,水下声学滑翔机共完成17个剖面的性能测试, 其中滑翔机控制功能测试3个剖面, 噪声特性测试7个剖面, 低频声源信号探测能力测试7个剖面, 平台最大下潜深度1 000 m。通过对记录的噪声数据进行分析表明, 该声学感知单元可有效接收低频声源发射的噪声数据。
海军潜艇学院和天津大学通过对现有“海燕”水下滑翔机进行声学特性[10]及电磁兼容性优化设计和减振降噪处理[11], 集成矢量水听器探测单元及其信号处理设备, 设计水声信号处理机舱室, 研发了“海豚号”水下声学滑翔机原理样机[12](见图6), 该样机可自主完成水中目标噪声信息获取、自主探测、声学信号跟踪、目标属性自主判别及快速上浮, 整个流程无需人工干预, 初步具备对目标的自主探测能力。
2 系统组成及功能
2.1 系统组成
水下声学滑翔机一般由水下声学滑翔机平台分系统、任务载荷分系统、数据传输与通信分系统、甲板调试与控制分系统及布放回收分系统5部分组成。

图6 “海豚号”水下声学滑翔机
1) 平台分系统通过对自身浮力和姿态的调节来完成无动力水下滑翔, 包括平台主体结构子系统、浮力驱动子系统、姿态调节与能源子系统, 以及导航与控制子系统, 可承受一定的耐压深度, 具备任务载荷搭载能力;
2) 任务载荷分系统包括海洋环境观测传感器、声学传感器及水声信号处理机, 可完成海洋水文环境观测和水下目标探测任务;
3) 数据传输与通信分系统包括卫星天线、接收机和控制软件等, 可实现水下滑翔机与甲板调试与控制分系统的水文环境与声学数据近实时传输、任务指令下达和应急调度;
4) 甲板调试与控制分系统包括实时显示与状态监控、指挥与控制软件、多源信息接入与处理、目标态势展现等模块, 用于完成水下声学滑翔机布放前设备测试与参数设置、布放后任务指令下达与遥测数据接收、水下声学滑翔机状态监控、指挥控制及应急机动调度以及探测目标态势展现等任务;
5) 布放回收分系统主要包括多关节机械臂、可靠抓取机械手、可移动水面机器人等部分, 用于水面船和无人水面航行器对水下声学滑翔机的布放和回收。
相比于普通海洋环境观测型水下滑翔机, 水下声学滑翔机主要具有如下特点。
1) 声学与电磁兼容性更优。水下声学滑翔机对系统噪声、电磁兼容性要求更为苛刻, 需要对系统进行声学与电磁兼容性优化设计。
2) 水动力特性要求更高。水下声学滑翔机由于加装了声学系统, 平台外形和整体结构会不同程度的改变, 增加其水动力特性分析难度。
3) 信息处理更智能。除水下滑翔机常规导航、控制等信息自主处理外, 声学系统还需要具备目标自主探测和判别, 并需要根据判别结果, 完成同水下滑翔机主控系统的信息交互。
2.2 系统功能
水下声学滑翔机主要用于海洋环境精细化观测、海洋环境噪声测量和海洋目标监测, 其具体功能如下:
1) 具有水声环境长时序、大范围和精细化测量功能, 利用温盐深(conductance temperature de- pth, CTD)剖面测量仪完成全面、准确和长时的三维空间温度、盐度和深度数据采集;
2) 具有海洋环境噪声的测量与记录功能, 利用滑翔机搭载的水声传感器完成大范围、长时效、多深度海洋环境噪声数据的采集和记录;
3) 具有水下移动目标声学自主探测、声学信号跟踪、识别及信息回传功能。
3 关键技术
3.1 声学减振降噪技术
水下声学滑翔机结构复杂, 包含较多的执行单元与结构件, 且各单元的振动相互耦合, 为复杂的多体系统, 如何确认激励源、确定振动的传播路径及各单元振动耦合情况, 最终获得声学探测单元对此激励源的响应情况, 并据此开展有针对性的减振降噪, 是水下声学滑翔机目标探测应用亟需解决的关键问题。
2016年1月, 我国学者在消声水池测试了“海燕”水下滑翔机电池滑动、油泵启动及螺旋桨推进等工况辐射噪声级[13], 并根据测试结果分析了水下滑翔机主要噪声源, 及噪声对矢量水听器各通道接收信号的影响, 提出了水下滑翔机减振降噪技术方案, 优化了水下滑翔机目标探测应用声学系统工作时序。2016年8月, 中科院声学所在南海某海域开展了基于“海燕”水下声学滑翔机的海洋环境噪声观测试验, 由于水下声学滑翔机自噪声影响, 导致800 Hz和1 600 Hz高频段海洋环境噪声谱级大于100 Hz和200 Hz的低频段[14-16]。因此, 对水下声学滑翔机各工况下的辐射噪声进行有效测量, 得到其自噪声源分布及其特性, 是指导减振降噪措施实施和平台优化的前提。
3.2 自主控制技术
自主控制技术是目前国际研究的热点之一, 决定着水下滑翔机的智能化水平与任务执行能力[17]。由于水下滑翔机运行模式较为简单, 为保持其在续航能力方面的优势, 水下滑翔机一般搭载性能较低的单片机系统, 难以运行大规模、复杂的人工智能算法。目前水下滑翔机自主控制技术研究主要集中在基于环境感知的自适应任务控制、轨迹规划以及控制系统与声学系统信息交互等方面。
鉴于水下滑翔机自身计算能力与通信等方面的限制, 对于复杂的控制算法及大规模的编队控制, 大多借助岸基操控系统将计算结果发送给各水下滑翔机来实现对其的环境适应性控制。例如, 通过水下滑翔机编队返回的位置与温度信息构建海洋温度场模型, 进行滑翔机导航控制, 实现水下滑翔机编队的环境自适应采样控制[18-19]; 结合航路数据、海流及地理数据, 进行滑翔机任务路径规划, 避免发生与船舶相撞、搁浅等危险事故[20]。通过增强水下滑翔机的软硬件能力, 可以在滑翔机上运行简化的智能控制算法。例如, Lauren[21]以Slocum水下滑翔机为基础, 研究了浮力自适应调节技术, 滑翔机可以根据不同海域海水密度的变化进行自适应浮力调节; 同时开发了安全回收算法, 在水下滑翔机定位异常时, 可以自行回到布放点等待回收。Hans等[22]以Slocum水下滑翔机为基础, 研究了水下滑翔机环境自适应采样控制策略, 通过低功耗的传感器进行海洋滑翔机测量, 结合滑翔机内部存储的物理海洋模型, 进行特定海洋现象识别, 并自主触发高能耗的专业传感器进行海洋现象测量, 从而实现对水下滑翔机降耗的目的。水下滑翔机控制系统与声学系统信息交互主要体现在声学系统根据被探测目标的属性信息, 向主控系统传输是否应急上浮指令, 如若需要应急上浮进行信息回传, 控制系统则向螺旋桨发送启动指令, 进行快速上浮。
3.3 多模混合推进技术
传统水下滑翔机通过浮力驱动, 结合水动翼实现滑翔运动, 功耗低, 具有大航程、长续航能力等优点, 然而水下滑翔机滑翔速度一般在0.5 m/s左右, 航行容易受海流影响, 同时不能进行水平航行, 作业能力受限。针对此, 可通过集成螺旋桨等辅助推进装置, 使水下声学滑翔机同时具有推进与浮力驱动2种驱动方式, 以便在强流与低密度区域都可以进行辅助推进。多模混合推进技术为目前水下滑翔机研究热点之一。例如, Joo[23]建立了混合驱动水下滑翔机动力学模型, 并对滑翔机的运动特性进行了仿真分析; Khalid等[24]对混合驱动水下滑翔机进行了研究, 并建立了其动力学模型, 采用神经网络控制算法对水下滑翔机进行行为预测控制; 天津大学对水下滑翔机多模推进技术进行了系统研究, 成功研发出“海燕”混合推进水下滑翔机[25-27]。
3.4 声学传感器设计及应用技术
声学传感器在水下声学滑翔机集成应用需要突破工作深度和矢量水听器缓动声呐平台应用2项瓶颈技术。
1) 声学传感器大深度技术
只有声学传感器实现大深度工作, 才能真正实现水下声学滑翔机长时效、长航程隐蔽侦察。从弱信号目标远距离探测角度, 面向于我国周边海区, 特别是南海应用的水下声学滑翔机, 在大深度工作可充分利用深海声道轴能量聚焦效应, 实现弱信号目标的远距离侦察; 还可以利用深海反转会聚区, 采用可靠声路径方法实现目标的远距离探测。但上述功能的实现也不可避免地增加了声学传感器的体积和质量, 影响了整体水动力特性, 因此采用轻质耐压材料和新型换能元件, 以达到体积、质量和耐压能力的折中, 是声学传感器追求的终极目标。
2) 矢量水听器缓动声呐平台应用技术
矢量水听器应用在水下声学滑翔机缓动声呐平台上时, 由于受复杂海洋环境中内波、潮汐和大洋环流等影响, 矢量水听器及其声呐平台存在姿态变化, 声呐平台上矢量水听器探测的目标方位是相对于自身载体坐标系的方位信息, 为得到目标的准确方位信息还需测量矢量水听器相对于地理坐标系的实时姿态信息, 通过姿态校正将目标方位信息转换到地理坐标系[28]。矢量水听器姿态测量难题在一定程度上限制了其工程应用, 能否准确获取声矢量传感器实时姿态, 是其实现工程应用的关键。2007年, Clay等[29]将倾角 (俯仰角和滚动角)传感器和航向角传感器置于矢量水听器内, 使姿态传感器和加速度传感器单元轴向平行或重合, 成功研制了具备姿态测量功能的TV-002型矢量水听器, 并开展相关海上试验。笪良龙等[30]通过研发微机电系统(micro electro mechanical system, MEMS)姿态传感器, 并将其集成应用于矢量水听器设计[31], 研发了适用于水下声学滑翔机等水下缓动声呐平台的实时姿态测量矢量水听器[32], 并能直接得到探测目标相对地理坐标系的方位信息, 成功解决了矢量水听器在水下缓动声呐平台的应用难题。
3.5 目标自主判别技术
水声目标噪声识别分类是水声探测的“瓶颈”, 同时也是关键技术之一, 其流程是: 传感器或其阵列采集目标信号—数据预处理—特征提取—特征选择—推理预测和识别分类。但传统的水声目标识别方法需要人工干预提取目标数据特征, 这一过程需要操作者具有丰富水声信号处理知识和专业经验, 才有可能提取出有价值的目标特征数据, 并在此基础上进行推理预测和识别分类。而水下声学滑翔机、浮标等基于无人平台的目标属性判别, 则是由信号处理设备自主完成, 传统水下声目标识别分类方法已无法满足此要求, 因此, 需要目标属性判别具备智能化水平。2010年, 美国国防高级研究项目署(defense advanced research projects agency, DARPA)启动了“反潜持续跟踪无人艇(anti-submarine warfare continuous trail unma- nned vessel, ACTUV)”研究计划[33-34], 旨在研发一种可长时间在广阔海域对低噪音常规潜艇进行探测、识别和跟踪的新型无人水面舰艇, 首艘技术验证艇“海上猎手”号于2016年4月服役, 首次实现了水声目标自主识别, 该型水声探测装备可进行自主决策, 执行复杂的搜索、探测及跟踪任务。2015年10月, DARPA率先提出跨域海上监视和瞄准(cross domain maritime surveillance and targeting, CDMaST)计划[35], 旨在将现有反舰和反潜作战中的探测、跟踪、定位、识别、打击及评估等作战行动分解到广泛分布的无人机、无人艇、无人舰, 以及无人水下航行器等低成本、无人化的作战平台上, 以迫使潜在对手投入更多资源成本开展体系对抗[36]。国内, 张少康等[37]通过提取目标噪声数据梅尔倒谱系数特征, 构建长短时记忆网络识别分类模型, 初步实现了不依赖人工提取特征情况下的水声目标智能化识别分类。
3.6 安全布放和回收技术
水下滑翔机组网应用是达到海洋调查高分辨率要求的最好方法[38], 同时也是实现一定区域目标探测的有效手段, 目前很多任务中都有滑翔机网络的身影[39-42]。随着水下滑翔机及其网络应用的增加, 滑翔机安全布放回收问题逐渐引起大家关注, 特别是应用于目标探测的水下声学滑翔机, 由于其结构的改变, 在一定程度上增加了布放与回收难度。水下滑翔机安全布放回收技术主要包括海上安全作业与布放回收策略两方面。水下滑翔机在海上布放时为避免滑翔机与船相撞发生损坏, 一般通过滑道或者吊绳迎风布放。水下滑翔机回收时根据其global positioning system, GPS)位置进行搜寻, 为确保安全回收, Slocum、Spray还装有备用Argos信标, 当发现水下滑翔机后, 回收船慢慢靠近, 并通过吊绳或下放小艇回收, 在海况恶劣时也可通过吊网直接回收。在水下滑翔机布放回收策略方面, 为实现多台水下滑翔机的快速、高效回收, Enrique[43]研究了水下滑翔机的轨迹规划策略, 回收船按规划的航迹便可实现多台水下滑翔机的快速回收。
4 结束语
水下声学滑翔机利用净浮力和调整姿态角获得剖面滑翔推进力, 平台自身只在调整净浮力和姿态角时消耗少量能源, 具有功耗低、效率高、续航力强、维护费用低、可重复使用和大量投放等特点, 其作为一种海洋移动观探测设备, 已广泛应用于海洋安全体系和水文环境观测体系建设。随着能源优化策略、人工智能、大数据等科学技术的发展, 水下声学滑翔机必将在水下移动目标探测、战场环境精细化测量与保障、基础科学研究等领域发挥越来越重要的作用。
同国外先进水平相比, 我国虽然在滑翔机研制领域有了长足的发展, 但在物理机理分析、人工智能信息自主处理及自主协同组网探测等方面仍存在较大差距, 这将是未来研究的重点。基于此, 文中详细梳理了国内外水下声学滑翔机研究进展, 探讨了其设计及规模化应用涉及的多项关键技术, 以期为国内同类水下无人探测装备的系统开发提供参考。
[1] Matsumoto H, Stalin S E, Embley R W, et al. Hydroacoustics of a Submarine Eruption in the Northeast Lau Basin Using an Acoustic Glider[C]//Oceans 2010. Sydney: IEEE, 2010: 1-6.
[2] Webb D C, Simonetti P J, Jones C P. Slocum: An Underwater Glider Propelled by Environmental Energy[J]. IEEE J. Oceanic Eng, 2001, 26(4): 447-452.
[3] Moore S E, Howe B M, Stafford K M, et al. Including Whale Call Detection in Standard Ocean Measurements: Application of Acoustic Seagliders[J]. Marine Technology Society, 2007, 41(4): 53-57.
[4] Imlach J, Mahr R. Modification of a Military Grade Glider for Coastal Scientific Applications[C]//Oceans 2012. Hampton Roads, VA: IEEE, 2012: 1-6.
[5] Stephen. Autonomous Underwater Gliders[J]. InTech, 2009, 47(5): 84-96.
[6] ONR. Liberdade XRay Advanced Underwater Gilder [EB/OL]. (2006-04-19)[2019-10-31]. https://commons. Wik imedia.org/ wiki/File:Liberdade_XRay_ underwater_ glider.jpg.
[7] Hildebrand J A, D’Spain G L, Roch M A, et al. Glider- based Passive Acoustic Monitoring Techniques in the So- uthern California Region[R]. La Jolla: Scripps Institution of Oceanography, 2009.
[8] Gerald L D, Jenkins S A, Zimmerman R, et al. Underwater Acoustic Measurements with the Liberdade/X-Ray Flying Wing Glider[J]. The Journal of the Acoustical Society of America, 2005, 117(4): 2624.
[9] 王赞. 水下滑翔机声矢量探测系统研究与实现[D]. 北京: 中国科学院大学, 2014.
[10] 张小川, 王超, 孙芹东, 等. 水下滑翔机对矢量水听器测向影响研究[J]. 声学技术, 2017, 36(5): 327-328.Zhang Xiao-chuan, Wang Chao, Sun Qin-dong, et al. Influences by Underwater Glider on Measuring Direction of Vector Hydrophone[J]. Technical Acoustics, 2017, 36(5): 327-328.
[11] 孙芹东, 王超, 王文龙, 等. 声矢量传感器设计及水下滑翔机噪声测试分析[J]. 声学技术, 2017, 36(5): 767- 768.Sun Qin-dong, Wang Chao, Wang Wen-long, et al. Desi- gn of Acoustic Vector Sensor and Noise Test Analysis of Underwater glider[J]. Technical Acoustics, 2017, 36(5): 767-768.
[12] 王超, 孙芹东, 王文龙, 等. 水下目标警戒滑翔机声学系统设计与实现[J]. 声学技术, 2018, 37(5): 84-87.Wang Chao, Sun Qin-dong, Wang Wen-long, et al. Acoustic System Design and Implementation for Underwater Target Warning Glider[J]. Technical Acoustics, 2018, 37(5): 84-87.
[13] 王超, 孙芹东, 兰世泉, 等. 水下声学滑翔机目标探测性能南海试验分析[J]. 声学技术, 2018, 37(6): 149-150.Wang Chao, Sun Qin-dong, Lan Shi-quan, et al. Underwater Acoustic Glider Target Detection Performance Trial Analysis in the South China Sea[J]. Technical Acoustics, 2018, 37(6): 149-150.
[14] 刘璐, 兰世泉, 肖灵, 等.基于水下滑翔机的海洋环境噪声测量系统[J].应用声学, 2017, 36(4): 370-376.Liu Lu, Lan Shi-quan, Xiao Ling, et al. Measurement Sy- stem of Ambient Sea Noise Based on the Underwater Glider[J]. Journal of Applied Acoustics, 2017, 36(4): 370- 376.
[15] 刘璐, 肖灵.混合驱动水下滑翔机自噪声测量及分析[J].中国舰船研究, 2017, 12(4): 132-139.Liu Lu, Xiao Ling. Measurement and Analysis of Self-noise in Hybrid-driven Underwater Gliders[J].Chinese Journal of Ship Research, 2017, 12(4): 132-139.
[16] Liu L, Xiao L, Lan S Q, et al. Using Petrel II Glider to Analyze Underwater Noise Spectrogram in the South Ch- ina Sea[J]. Acoustic Australia, 2018, 46(2): 1-8.
[17] Curtin T B, Crimmins D M, Curcio J, et al. Autonomous Underwater Vehicles: Trends and transformations[J]. Ma- rine Technology Society Journal, 2005, 39: 65-75.
[18] Fiorelli E, Bhatta F, Leonard N E. Adaptive Sampling Using Feedback Control of an Autonomous Underwater Glider Fleet[C]//Proceedings of the 13th International Sy- mposium on Unmanned Untethered Submersible Technology. Durham New Hampshire: Autonomous Undersea Systems Institute, 2003: 1-16.
[19] Brito M P, Lewis R S, Bose N, et al. Adaptive Autonomous Underwater Vehicles: An Assessment of Their Effectiveness for Oceanographic Applications[J]. IEEE Transactions on Engineering Management, 2018, 66(1): 98-111.
[20] Arvind P, Binney J, Hollinger G A, et al. Risk-aware Path Planning for Autonomous Underwater Vehicles using Predictive Ocean Models[J]. Journal of Field Robotics, 2013, 30(5): 741-762.
[21] Lauren C. Expanding the Capabilities of the Slocum Glider[C]//Ocenas 2016 MTS/IEEE Monterey. California: IEEE, 2016: 1-5.
[22] Hans C W, Ulrich K. Feature Based Adaptive Energy Management of Sensors on Autonomous Underwater Vehicles[J]. Ocean Engineering, 2015, 97: 21-29.
[23] Joo M G. A Controller Comprising Tail Wing Control of a Hybrid Autonomous Underwater Vehicle for Use as an Underwater Glider[J]. International Journal of Naval Arc- hitecture and Ocean Engineering, 2019, 11(2): 865-874.
[24] Khalid I, Arshad M R, Ishak S. A Hybrid-driven Underwater Glider Model, Hydrodynamics Estimation, and an Analysis of the Motion Control[J]. Ocean Engineering, 2014, 81: 111-129.
[25] Niu W D, Wang S X, Wang Y H, et al. Stability Analysis of Hybrid-driven Underwater Glider[J]. China Ocean En- gineering, 2017, 31(5): 528-538.
[26] Yang Y, Liu Y, Zhang L, et al. Influence of the Propeller on Motion Performance of HUGs[C]//Oceans 2016. Sha- nghai: IEEE, 2016.
[27] Lei Z, Wang Y, Zhang L, et al. Uncertainty Behavior Research of Hybrid Underwater Glider[C]//Oceans 2016. Shanghai: IEEE, 2016.
[28] 牛嗣亮, 张振宇, 胡永明, 等. 单矢量水听器的姿态修正测向问题探讨[J]. 国防科技大学学报, 2011, 33(6): 105-110. Niu Si-liang, Zhang Zhen-yu, Hu Yong-ming, et al. Direction of Arrival Estimation from a Single Vector Hydrophone with Attitude Correction[J]. Journal of National University of Defense Technology, 2011, 33(6): 105-110.
[29] Clay S J, Andic H. Underwater Acoustic Bearing Sensor: US: US7224640[P]. 2007-05-29.
[30] 笪良龙, 王文龙, 孙芹东, 等. 一种微型矢量水听器姿态测量系统[J]. 中国惯性技术学报, 2016, 24(1): 20-25.Da Liang-long, Wang Wen-long, Sun Qin-dong, et al. Mi- niaturized Attitude Measurement System of Vector Hydrophone[J]. Journal of Chinese Inertial Technology, 2016, 24(1): 20-25.
[31] 笪良龙, 孙芹东, 王文龙, 等. 基于 MEMS 姿态传感器的声矢量传感器设计[J]. 中国惯性技术学报, 2016, 24(4): 531-536.Da Liang-long, Sun Qin-dong, Wang Wen-long, et al. Design of an Acoustic Vector Sensor Based on MEMS Attitude Sensor[J]. Journal of Chinese Inertial Technology, 2016, 24(4): 531-536.
[32] 孙芹东, 王超, 王文龙, 等. 适于水下缓动无人平台的同振式矢量水听器设计与应用[J]. 声学技术, 2018, 37(6): 591-592.Sun Qin-dong, Wang Chao, Wang Wen-long, et al. Design and Application of Co-vibrating Vector Hydrophone for Underwater Slow-moving Unmanned Platform[J]. Tec- hnical Acoustics, 2018, 37(6): 591-592.
[33] 凌国民. 无人平台自主反潜[C]//2017年装备技术发展论坛论文集. 北京: 中国造船工程学会电子技术学术委员会, 2017.
[34] 李大光, 周军. 美国海上猎手无人战舰将使未来反潜作战发生改变[J]. 飞航导弹, 2016(9): 3-7.
[35] DARPA. Cross Domain Maritime Surveillance and Targeting[R]. DARPA-BBA-16-01. Virginia: DARPA, 2015.
[36] 叶显武. 从DARPA研究计划看海战场预警探测系统发展[J]. 现代雷达, 2016, 38(11): 13-17.Ye Xian-wu. Development Trend Study of Marine Early Warning and Detection System by Reviewing DARPA Cu- rrent Research Programs[J]. Modern Radar, 2016, 38(11): 13-17.
[37] 张少康, 田德艳. 水下声目标的梅尔倒谱系数智能分类方法[J]. 应用声学, 2019, 38(2): 267-272.Zhang Shao-kang, Tian De-yan. Intelligent Classification Method of Mel Frequency Cepstrum Coefficient for Underwater Acoustic Targets[J]. Journal of Applied Acou- stics, 2019, 38(2): 267-272.
[38] Rudnick D L, Davis R E, Eriksen C C, et al. Underwater Glider for Ocean Research[J]. Marine Technology Society Journal, 2004, 38(2): 73-84.
[39] Paley D A, Zhang F, Leonard N E. Cooperative Control for Ocean Sampling: The Glider Coordinated Control Sy- stem[J]. IEEE Transactions on Control Systems Techno- logy, 2008, 16(4): 735-744.
[40] Peng Z, Wang D, Wang H, et al. Distributed Coordinated Tracking of Multiple Autonomous Underwater Vehicles[J]. Nonlinear Dynamics, 2014, 78(2): 1261-1276.
[41] Xue D Y, Wu Z L, Wang Y H, et al. Coordinate Control, Motion Optimization and Sea Experiment of a Fleet of Petrel-II Gliders[J]. Chinese Journal of Mechanical En- gineering, 2018, 31(1): 17.
[42] Fratantoni D M, Haddock S H D. Introduction to the Autonomous Ocean Sampling Network(AOSN-II) Program [J]. Deep Sea Research Part II Topical Studies in Ocea- nography, 2009, 56(3-5): 61.
[43] Enrique F P. Contributions to Underwater Glider Path Planning[D]. Las Palmas de Gran Canaria: Universidad de Las Palmas de Gran Canaria, 2014.
Key Technologies of Underwater Acoustic Glider: A Review
SUN Qin-dong1, 2, LAN Shi-quan3*, WANG Chao1, 2, WANG Wen-long1, 2
(1. Navy Submarine Academy, Qingdao 266199, China; 2. The Joint Laboratory of Marine Application Technology, Pilot National Laboratory for Marine Science and Technology(Qingdao), Qingdao 266237, China ; 3. School of Mechanical Engineering, Tianjin University, Tianjin 300350, China)
Underwater acoustic glider has the characteristics of long voyage, long endurance, high invisibility and low cost. It is an advantageous platform for the underwater moving target detection and fine measurement of marine hydrological environment. This paper review the research progress of underwater acoustic gliders in the world, and briefly describes their system compositions and functions. The key technologies of underwater acoustic glider design and scale application are discussed, including vibration and noise reduction, autonomous control, attitude control, multi-mode hybrid propulsion, acoustic sensor design and application, target attribute autonomous discrimination, safe deployment, and recycling. This paper may provide reference for the development of similar unmanned undersea detection equipment in China.
underwater acoustic glider; autonomous detection; vibrationandnoisereduction; objective autonomy discrimination
U674.941; TB565.1
R
2096-3920(2020)01-0010-08
10.11993/j.issn.2096-3920.2020.01.002
孙芹东, 兰世泉, 王超, 等. 水下声学滑翔机研究进展及关键技术[J]. 水下无人系统学报, 2020, 28(1): 10-17.
2019-10-31;
2019-12-19.
国家重点研发计划资助项目(2019YFC0311700); 青岛海洋科学与技术试点国家实验室问海计划资助项目(2017WH- ZZB0601).
兰世泉(1988-), 男, 硕士, 工程师, 主要研究方向为水下机器人技术.
(责任编辑: 杨力军)
