基于北斗的超长基线解算在滑坡基准点监测中的应用探讨
2020-03-05何玉童李宏祥
何玉童,汪 剑,李宏祥
(上海华测导航技术股份有限公司,上海 201702)
0 引言
近20年来,针对地质灾害滑坡的研究,进入了一个空前活跃时期,监测手段和方法也越来越自动、智能。大部分的自动化监测手段,仍然需要基准点。有很多文献给出了滑坡点的数据分析,但是基准点变化容易被大家忽视。
常规的基准点变化通常采用定期人工监测的方式,采集一段时间内的观测数据,联测附近的已知点。因为已知点通常比较老旧,效果不是特别理想。也有一些学者通过GAMIT/GLOBK、Bernese进行解算[1-3],但是对使用者的技术水平要求很高,所以使用范围有限。
开发基于北斗的自动化超长基线处理软件CLBPE1.0,通过自动联测IGS(International GPS Service)站点,给出基准点的空间三维坐标,针对原有的后处理模块处理长基线(100~2 000 km)时误差消除不彻底的问题,进行算法改进,采用新的数学模型(轨道模型与观测模型),改进误差改正、周跳探测与修复以及模糊度解算策略,能够处理长达2 000 km的基线,并且精度与GAMIT、Bernese相当;软件的图形化界面更方便操作,在滑坡监测等领域具有非常好的应用前景。
1 超长基线解算软件设计
1.1 软件概述
国内外主要的GNSS处理软件对中长基线(100 km以内)的处理可以满足精度需求,但是对于长基线甚至超长基线(100~2 000 km)就无法让用户满意,例如Trimble的TBC软件对于较长基线的处理,与Bernese的解算结果仍然相差较大。
CLBPE1.0作为一款专门用于长基线解算的软件,主要用于高等级控制网、IGS联测、CORS(Continuously Operating Reference Stations)网位移监测等不同领域中,可为地质灾害监测提供基准的变化监测。
1.2 系统框架
软件分为交互层、数据层、预处理层、解算层,总体结构见图1。
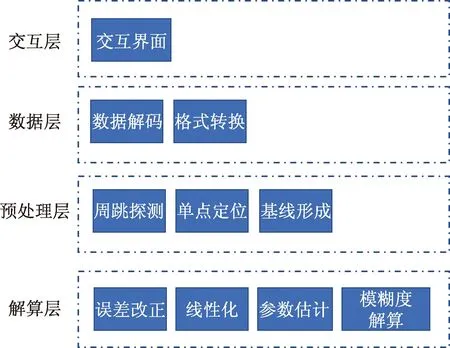
图1 系统框架图Fig.1 Frame diagram of system
交互层:主要用于人机交互,用户可打开网页,选择IGS站,并上传基准点的观测数据;
数据层:将客户上传的数据进行解析,得到星历、载波相位等数据;
预处理层:通过周跳探测对数据进行预处理,单点定位和基线形成,为解算层提供支撑;
解算层:通过误差改正、线性化、参数估计、模糊度解算,最终得出解算的结果,解算层在运算过程中调用了预处理层的结果。
1.3 关键技术及实现
(1)轨道模型精化技术
通过对精密轨道进行基于卫星物理运动模型的拟合[4],对卫星运动方程、变分方程进行数值积分来拟合轨道,并计算初始轨道的根数、多项式系数以及轨道偏导数(导航卫星系统主要是对光压的偏导数、Y轴加速度等)。为获取精确的轨道模型,考虑了各种摄动力影响,其中与引力、潮汐相关的力根据模型系数来计算,光压、Y轴加速度(低轨卫星还要考虑大气阻力)使用是经验模型来进行评估。
(2)误差改正
通常会将误差分为三大类,即卫星相关的误差、传播路径相关的误差以及与测站(或接收机)相关的误差[1](图2)。
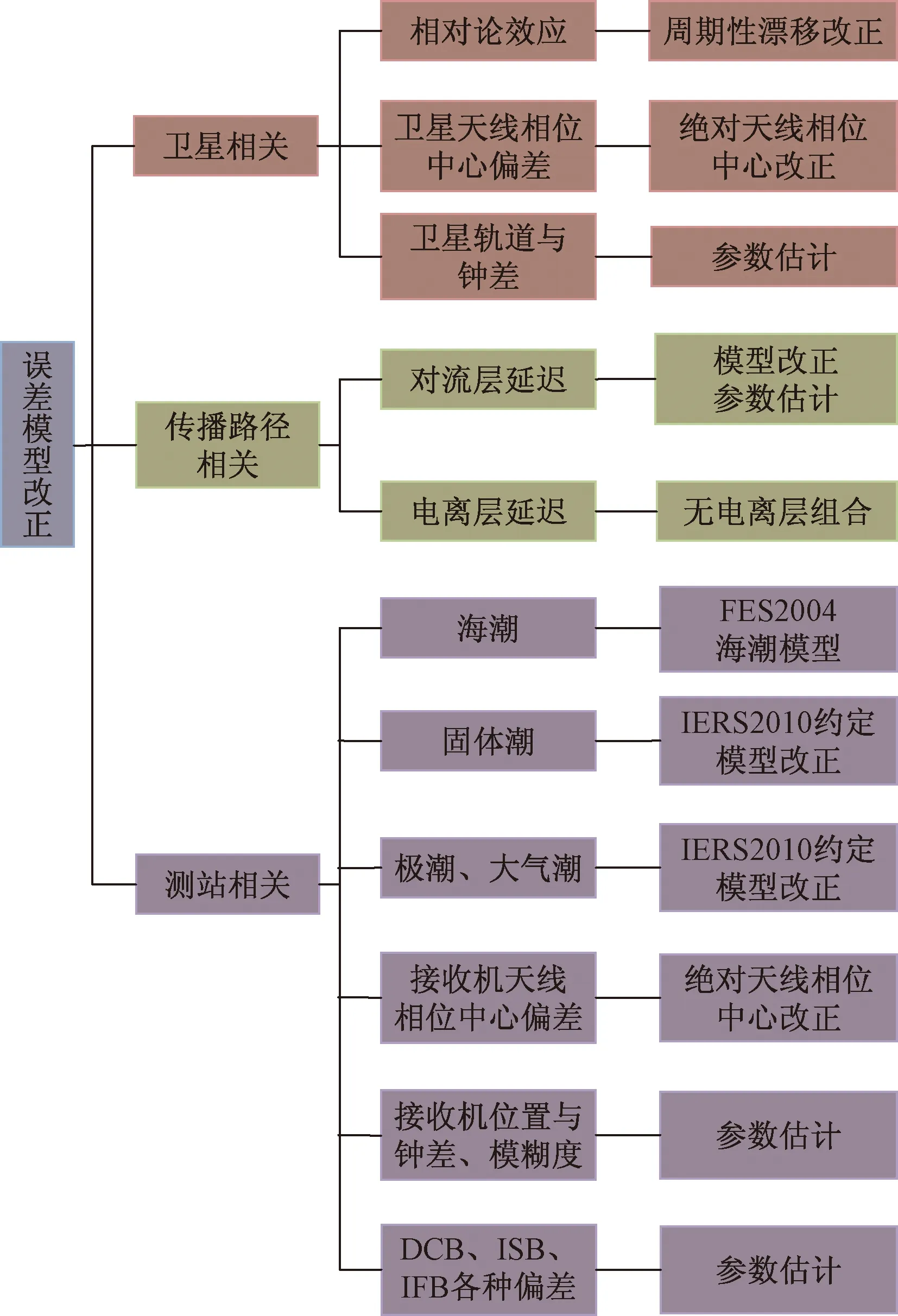
图2 误差的分类Fig.2 Classification of errors
对于海潮、固体潮、大气潮等保守力模型,使用模型来改正。而对流层、电离层等误差,采用了经验模型(或是格网模型),并在改正后进一步采用参数估计(如天顶对流层以及水平梯度、钟差参数等)和观测值组合。
(3)模糊度处理
对于中长距离的基线,一般使用无电离层组合LC,可以消除电离层一阶项的延迟,但是组合后的模糊度不再具有整数特性,本软件引入WL(宽巷)模糊度解,因WL的波长达到86 cm,远远大于电离层、对流层的误差,在模糊度固定上取得良好的效果。固定了WL模糊度以后,再确定窄巷NL模糊度,从而得到L1、L2的整数模糊度[5]。
本软件采用荷兰Delft大学的Teunissen教授提出的LAMBDA方法进行模糊度搜索,基于整数最小二乘求解的原理,利用整数变换将协方差矩阵进行矩阵分解,从而降低模糊度分量之间的相关性,提高了搜索的效率。
2 算例分析
2.1 与IGS已知点对比
选取北京房山的IGS点做为基准点,长春的IGS站点(CHAN)作为待计算坐标,基线距离大约1 000 km。与长春IGS已知坐标误差在2 mm以内(表1)。

表1 与已知点比较Table 1 Comparison with the given point
2.2 与Bernese对比
本文选取了兰州海石湾矿业的基准点作为待测坐标,以北京房山IGS站为基准,基线长度约为1 000 km,分别计算了Bernese和本软件的结果,坐标最大的为Z方向,为1.5 mm,其余均小于1 mm,结果见表2。

表2 与Bernese比较Table 2 Comparison with base points in Bernese
2.3 长期观测
本文选取了南水北调中线河南淅川段干渠监测项目的基准点BDZA的数据做试验,数据从2018年4月至2018年10月份共计180天左右,每天出一组坐标。数据解算过程中,软件自动联测北京房山的IGS站点,基线距离约为1 000 km。从图3可以看出,该点在X方向上,有明显的滑动趋势,平均速率为-10 mm/a,滑动渐趋平稳;Y、Z方向上则未见明显滑动。数据结果见图3。

图3 数据变化曲线图Fig.3 Variation curve of data
3 结语
超长基线解算能够根据用户上传的Rinex文件,自动下载IGS站点的数据,计算出高精度的三维坐标,使得滑坡基准点监测精度优于3 mm,与常规Bernese软件精度相当,且基于此算法的软件界面简单易用,在地质灾害,滑坡应急救援等领域的基准点监测方面有较好的应用前景。
