一种伞型索网式空间可展开天线预张力优化设计①
2020-03-04井旭旭文立华
井旭旭,文立华
(1.中国科学院光电技术研究所,成都 610200;2.西北工业大学航天学院,西安 710000)
0 引言
索网式空间可展开天线是目前应用广泛的空间可展开天线形式,在对地观测、导航定位、移动通信等方面的应用日益广泛。这种天线反射面及其调整结构是典型的空间张拉结构,具有大位移、小应变的力学特性并且仅能单向承拉,呈现典型的几何非线性特性。索网式可展开天线反射网面上索单元的位置误差决定了天线精度,索网结构的预张力分布和边界条件决定了结构的形状及其承载能力,具有特定形状的索网结构及其边界条件也对应着相应的预张力场。因此,索网式可展开天线的预张力设计问题本质是在反射网面保形条件下寻求一组可以构成设计抛物面的预张力,也即“由形找力”。
关于张拉整体结构的找形与优化问题已有大量的研究,数值方法是索网式空间张拉结构找形的最主要设计方法,可以分为力密度法[1,2]、动力松弛法[3,4]和非线性有限元法[5,6]等。文献[7,8]探索了索杆结构的找形与预张力设计,由于这些方法所有单元都是轴向受力,忽略了横向载荷和弯矩,不适用于索梁结构。文献[9,10]探索了索梁结构找形与优化方法,由于问题的高度非线性,给索梁张拉结构的找形带来了一定的困难。以上各类预张力找形设计方法在本质上可以分为两类:一是利用索网的平衡方程求解一组合适的预张力;二是试探性给出一组预张力,利用非线性有限元法进行找形分析,给出反射网面误差,通过优化方法找出一组合适的预张力。前一类方法的优点是力学原理清晰,但缺点在于没有考虑索材的本构关系,且预张力可能存在多组解。后一类方法的优点在于引入了索材的本构关系,缺点在于很难给出一组初始自平衡预张力,使得计算型面收敛困难。
本文将结合上述两类方法各自的优点,提出了一种索网结构的找形与优化设计方法,完成了伞型索网式可展开天线的预张力优化与找形设计。首先,利用反射网节点的平衡矩阵,给出可行的自平衡预张力设计空间。其次,在设计空间上利用遗传算法,优化出使前表面索单元预张力配置最均匀的一组初始张力。这组预张力不仅满足均匀化要求,并且是自平衡的。最后,将这组初始张力作为输入,利用非线性有限元法进行找形分析,获得了满意的结果。
1 天线构型
如图1所示,伞形索网式可展开天线设计为六骨架结构。其中,前反射网面为抛物面,反射网面不直接依附于支撑肋(展开杆)。支撑肋之间设计有对称的跨肋调整索以及竖向调整索。伞形空间可展开天线由柔性索网及支撑结构共同形成受力体系。天线结构参数:口径为2.5m;焦距为2m;型面精度要求σ≤2mm。伞形空间可展开天线前反射面由三向网格逼近抛物面面型,一般采用最小均值法来估算网格单元长与反射面型之间的关系[11]:

(a)天线布局
(1)
抛物面的设计精度指标决定了网格单元的最大可取长度。反射面网格单元需满足Lmax<503.9mm,实际设计为L=337mm。天线支撑肋设计为单肢旋转可展开结构,展开角为82°。支撑结构原理如图2所示。天线索网材料均为Kevlar49,支撑肋材料为碳纤维M60J。

图2 支撑结构原理图Fig.2 Schematic diagram of the supporting structure
2 预张力平衡方程
2.1 平衡矩阵与协调矩阵
伞形空间可展开天线的索网部分可以看作是由节点与节点之间连接承受张拉力的杆单元而成的桁架体系,又称为张力桁架体系。对于可展开天线索网结构,如图3所示,任意自由节点i均可以写出其节点平衡方程:

图3 节点受力示意图Fig.3 Diagram of the force on a nodea
(2)

对索网结构中的每一个非约束节点列出上述平衡方程,并集合成总体平衡方程:
[A]3(N-C)×M{T}M×1={P}3(N-C)×1
(3)
式中:N为节点总数;C为约束节点总数;M为索网结构的索段总数。[A]3(N-C)×M为索网结构的平衡矩阵;{T}M×1为索段的预张力列向量;{P}3(N-C)×1为作用于所有非约束节点上的外载荷列向量。
假设平衡矩阵A与变形协调矩阵B的秩为r,则自应力模态数 和机构位移模态数m满足如下的关系式[8,9]:
s=M-r
(4)
m=3(N-C)-r
(5)
对于图1所示的伞形天线索网结构而言,所有非约束节点在工作状态下均不承受外载荷的作用。因此,式(3)中的右端项{P}3(N-C)×1=0,故而:
[A]3(N-C)×M{T}M×1=O
(6)
显然,空间天线的索网结构的预张力优化问题就是在满足方程(6)的条件下,求解一组满足前表面索预张力足够均匀的列向量T。[A]3(N-C)×M矩阵的零空间就是自平衡张力的设计空间。
2.2 伞形天线的预张力优化模型
天线反射网结构平衡方程式平衡矩阵 完全由索网的节点位置确定。考虑到空间天线反射网结构的对称特性,且自平衡索网不承受外载荷,取天线反射网结构的1/12模型给出反射网的平衡矩阵A是合适的[12,13]。
由图4可以看出:天线反射网的1/12模型共有18个自由节点,有48条索段。因此,天线反射网的平衡矩阵A的规模为54×48。已经求得平衡矩阵A54×48的秩为:

图4 索段编号Fig.4 Number of the cable segments
rank(A54×48)=37
(7)
由此,可以得到结构的自应力模态数s=11和机构位移模态数m=17。
这里引入奇异值分解求解平衡矩阵A54×48的自应力模态向量,也即A54×48的零空间基。
(8)
由矩阵的奇异值分解特性可以知道:矩阵V的右11列构成平衡矩阵A54×48的零空间正交基;矩阵U的右17列构成平衡矩阵A54×48的左零空间正交基。假若将反射网的自应力模态矩阵取为S=(s1,s2,L,s11),那么S可取为[12]:
S=(s1,s2,L,s11)=(V38,V39,L,V48)
(9)
反射网中的预张力分布可以展开为:
T=a1s1+a2s2+L+a11s11
(10)
天线反射网面上预张力均匀化模型的优化变量可以取为平衡矩阵自应力模态向量的组合系数:a1,a2,L,a11。天线反射网结构预张力优化目标函数:
min:fmax/fmin
(11)
式中,fmax为前反射面上索单元最大张拉力,fmin为前反射面上索单元最小张拉力。对应于张拉力列向量T,可以将目标函数改写为:
min: max(T1)/min(T1)
(12)
式中,T1=T(1:27)为T向量中前反射面上的索段张力。所有索单元预张力的取值范围为[2N,100N]。则反射网预张力优化模型的约束条件为:
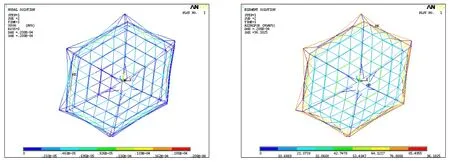
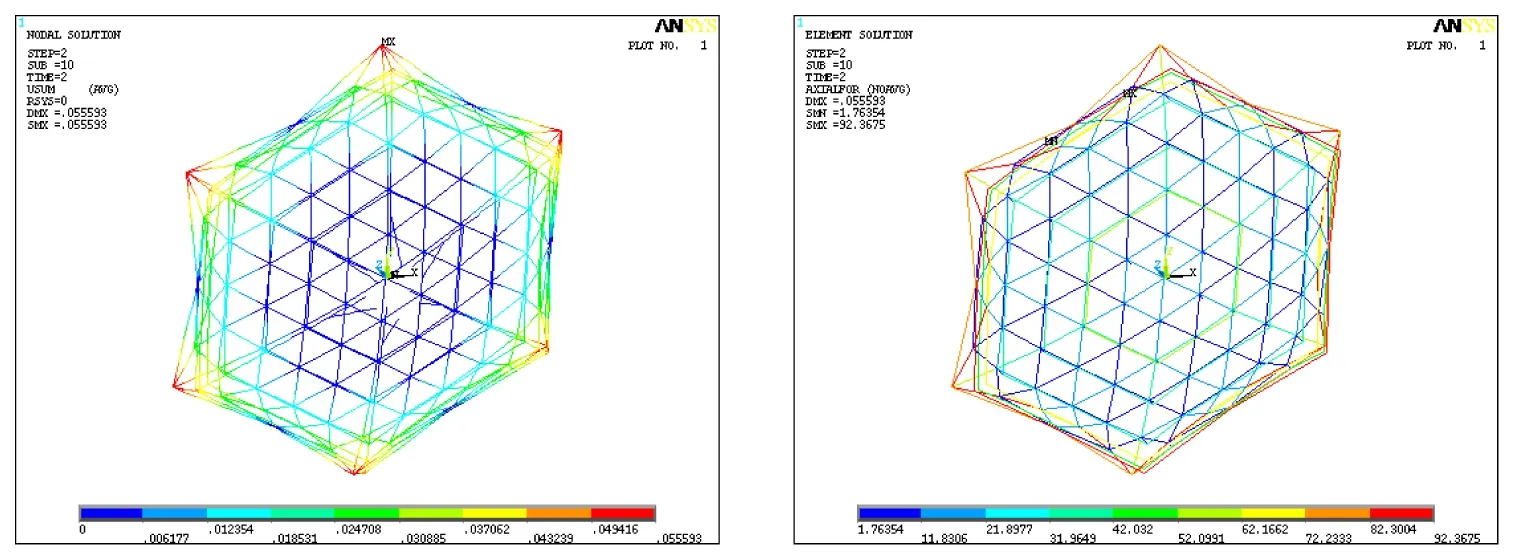
2N (13) 综上,天线反射网结构预张力优化为如下优化问题: finda1,a2,L,a11 min max(T1)/min(T1) s.t. 2 (14) 优化问题式(14)是一个多变量优化问题,并且,张力列向量T是含有优化变量a1,a2,L,a11的参变量,但是约束条件却直接建立在列向量T的所有元素上。因此优化变量a1,a2,L,a11与目标函数之间很难建立起直接的函数关系。采用遗传算法求解优化问题式(14)比较合适。 遗传算法提供了一种求解非线性、多模型、多目标等复杂优化问题的通用框架,但是它不能处理有约束的优化问题[13]。因此需要对优化问题式(14)进行相应改造,使其转化为无约束优化问题。 首先,对优化问题式(14)中的约束条件进行归一化处理: (15) (16) 其次,利用外点罚函数法对目标函数进行改进。取一个极大的正数M,构成修正后的目标函数为 min:max(T1)/min(T1)+ (17) 最后,优化变量a1,a2,L,a11取值范围,必须保证式(10)求得的张拉力列向量T中的每一个元素都可以在[2N,100N]内任意取值。本文按照如下的方式来保证这一条件:将已经正交的自应力模态向量s1,s2,L,s11归一化,并分别对元素取绝对值,最后将这些元素恒大于零的自应力模态向量线性求和,取和列向量中的最小元素为参考量,以张拉力的上限100N除以该参考量作为优化变量a1,a2,L,a11取值范围的参考上限,如式(18)所示。对于本文而言:|aj|max=809.98,为使优化变量更易于浮点编码,优化变量的取值范围取定为:aj[-1000,1000],(j=1,2,L,11)。 (18) 这样,反射网预张力优化式(14)转化为如下优化问题: finda1,a2,L,a11-1000 [max(T(i)/100-1,0)]2} (19) 将遗传算法中交叉概率取为Pc=0.7,变异概率取为Pm=0.15,种群规模取为100,遗传终止代数取为500。外点罚值取为M=1×109。优化模型式(19)的目标函数值(适应度)随遗传代数的变化曲线如图5所示,可以看出:目标函数值(适应度)随着遗传代数的增加逐渐降低,即反射面上的索网单元预张力趋于均匀化。 图5 目标函数曲线Fig.5 The objective function curve 图5代表的种群进化过程表明:优化变量在16代之前的寻优主要是寻找满足优化模型式(14)中约束条件的变量范围,这个变量范围是优化模型满足约束条件时的可行域,优化变量很快收敛到这个可行域上。优化变量在16~501代上的寻优主要是在约束条件的可行域下寻找使得目标函数值最小的可行解,这些可行解构成的目标函数可行域是满足约束条件可行域的子集。最终得到的目标函数值为:max(T1)/min(T1)=8.406,索网的最终预张力分布如表1所示。 表1 索网单元张拉力分布值Tab.1 Pretensions on the cable segments 为验证上述一组预应力的正确性,可以将预应力作为输入条件,利用非线性有限元法对天线进行找形分析。若找形结果显示反射面节点误差很小,在数值误差以内,则说明这组预张力可以使天线张拉成型,且索网位于设计抛物面上。采用有限元软件ANSYS对天线反射网结构进行找形分析,小弹性模量法作为找形方法。模型中索网单元采用link10单元来模拟,索结构的预张力通过给定索单元link10初始应变的方式施加。找形分析仅考虑预应力条件下索网结构的最终形态是否满足面型要求,因此这里将天线支撑结构设定为固定约束。 (a)位移云图 (b)张拉力云图图6 找形之后索网节点位移与张拉力Fig.6 Displacements and Pretensions on the cable segments after the form-finding analysis 展开天线最终以索网及展开肋构成索梁一体式自平衡结构,在完成索网找形之后,还需对天线整体结构进行形态分析,以验证索网预张力的稳定性。 (a)位移云图 (b)张拉力云图图7 整体张拉后索网节点位移与张拉力Fig.7 Displacements and Pretensions on the cable segments after the antenna analysis 由图7可以看出:相较于不考虑支撑肋的弹性变形时而言,整体分析后的节点位移变大,但前表面节点最大位移依然保持在0.06mm以下,说明天线抛物面形态保持良好,此时天线反射面的型面误差为 ,也远小于设计指标2mm要求。比较索单元预张力在找形分析和整体分析后的配置变化情况,如图8所示。可以看出:前表面索单元的预张力在引入支撑肋弹性变形后普遍降低,但前索网张力配置的均匀性保持良好。这是由于支撑肋作为细长杆结构,抗弯刚度较小,支撑肋的弹性变形减小了索网单元的弹性伸长量,进而降低了索单元的预张力。通过对支撑肋进行详细的抗弯变形设计,并减小竖向调整索长度,最终得到的预张力与优化结果误差小于12%。 图8 索网张拉力比较图Fig.8 Contrast diagram of pretensions on the cable segments 本文给出了一种伞形索网式展开天线的预张力设计分析方法。该方法从索网结构平衡方程出发,建立了索网反射面上预张力均匀化优化模型,采用遗传算法得到了一组适当的预张力,将伞形天线前表面上最大张力与最小张力比降低到了8.406。非线性有限元的找形分析充分验证了上述优化结果的正确性。3 预张力优化设计
3.1 优化模型转化
3.2 预张力优化


4 反射面找形分析


5 结论
