基于虚拟耦合的列车群体智能控制技术研究及展望
2020-03-04刘岭
刘 岭
(1.北京全路通信信号研究设计院集团有限公司,北京 100070;2.北京市高速铁路运行控制系统工程技术研究中心,北京 100070)
1 概述
利用闭塞方式的列车运行控制方法在世界范围内广泛使用。欧洲采用欧洲列车控制系统(ETCS)和欧洲铁路运输管理系统(ERTMS),主要实现列车运行控制和铁路运输管理,保障列车在铁路网络中的安全运行和铁路网络中运输资源的合理配置及使用[1-3]。美国曾于20 世纪80 年代开发了先进列车控制系统(ATCS),之后,列车加强型控制系统(ITCS)、先进列车自动控制系统(AATC)、列车间隔控制系统(PTS)相继研制并投入使用[4]。日本最广为人知的运输管理系统分别是计算机和无线电辅助列车控制系统(COMTRAC)与新干线列车运行管理系统(COSMOS),其自行研制的列车自动控制系统(ATC)保障了列车安全高效行车[5]。
基于闭塞的列车控制通常采用地面中心设备集中发布行车指令的控制方法,而集中式的信息处理方式对更加快速、安全的信息处理要求适应性较差,随之产生了分布式的信息处理技术。分布式的群体协同控制成为提升复杂列车控制系统效率的一个重要手段。作为人工智能5 大发展方向之一的群体智能技术为群体协同控制方法提供了新的支撑。群体智能技术能够高效解决复杂的组合优化类问题,并已广泛应用于交通领域[6-9]。近年来,MAS 理论在列车群体控制方面进行了初探,并在铁路货运方面取得一定的研究成果[10,12]。
1999 年,Bock U 等提出“虚拟耦合”的概念,概述了虚拟耦合列车系统设计与研发的相关方法,并探讨了在货物运输中的技术研究[13,14]。日本学者Tilo Schumann 采用DFSimu 工具模拟虚拟耦合方式,东京到大阪新干线每小时每个方向运量能 够 从15 000 增 加 到23 000 人 次。2015 年5 月欧洲全面启动的“构建未来铁路系统联合行动计划(Shift2Rail)”[15]提出了虚拟耦合列车的研究方向,虚拟耦合列车是指多个列车之间不依靠物理连接,而是通过无线通信实现多列车以相同的速度、极小的间隔的列车群体协同运行方式。
近年来群体智能和车联网技术的发展为采用新兴技术解决列车运行控制效率问题提供了新机遇。同时,随着轨道交通网络日趋完善、运输压力日渐增加,运输能力紧张问题亟待解决,通过提高列车运行控制效率提升轨道交通运输能力问题显得尤为重要。本论文在阐述列车运行控制方法的基础上,着重刻画基于虚拟耦合的列车群智能控制方法,提出基于虚拟耦合的列车控制及调度的系统框架,设置仿真场景对该方法的有效性进行验证,并从深化复杂场景下的基础理论研究、强化系统安全设计技术研究、加快系统设计及产业化技术研究等方面提出基于群体智能列车控制的研究发展方向。
2 列车运行控制方式的发展
2.1 基于闭塞的列车运行控制方法
基于闭塞的列车运行控制方式主要有固定闭塞、准移动闭塞和移动闭塞[16]。固定闭塞,通常由基础定位设备将铁路线路划分为一些闭塞分区,每个分区内规定有运行速度上限,各个闭塞分区速度不连续,呈阶梯分布,以此保障列车与前行列车安全距离。准移动闭塞,利用目标―距离控制方式,采用一次制动曲线,控制安全行车,但移动授权终端依然为闭塞分区固定边界。移动闭塞,则是彻底突破固定闭塞概念,闭塞分区边界不固定,随着列车运行而自动更新,列车的移动授权可到前行列车尾部。移动闭塞,可分为基于位置的移动闭塞和基于速度的移动闭塞,前者在列车追踪运行过程中只考虑前行列车位置,后者除考虑前行列车位置外,还考虑前行列车速度。
根据上述分析可知,闭塞方式的演化主要通过不断缩小列车最小运行间距从而提高列车运行效率。列车最小运行间距是指列车在运行过程中,在保证列车间不发生碰撞等安全风险的前提下,相邻两列车在追踪运行过程中,两列车车头之间能够达到的最小运行间距。如图1 所示,表示不同闭塞方式下列车的最小运行间距。
在固定闭塞模式下,列车间最小运行间距依托闭塞分区的计算方式,该值相对固定。准移动闭塞综合列车的运行曲线与闭塞分区的方式,列车最小运行间距有一定的减少。在基于位置和速度的两种移动闭塞模式下,列车最小运行间距随列车状态呈现动态变化的特性,其中,基于速度的移动闭塞由于考虑了前车速度和加速度,因此列车间最小运行间距小于基于位置的移动闭塞模式,列车运行效率最高。目前,应用准移动闭塞的高铁列车设计最小运行时间间隔为3 min。可见,现有列车控制方法中列车的最小运行间距仍然较大,区间通过能力仍有待进一步提升。
2.2 基于虚拟耦合的列车群运行控制技术
根据 “虚拟耦合”的概念,论文基于群体智能技术刻画虚拟耦合列车群运行控制技术的核心概念。通过虚拟耦合组成的列车群被视为一个多智能体系统,各列车作为独立个体能够实现精确定位、测速测距从而感知列车运行环境,能够计算自身的速度曲线,保障列车安全行驶,并能够基于无线与其他列车进行通信,建立并保持列车线性编队运行状态,并且不能发生碰撞,从而实现协调控制。
2.2.1 虚拟耦合列车群内涵
基于虚拟耦合的列车群运行如图2 所示。在虚拟耦合列车群中,一个列车群共由N 列列车组成, vi代表列车群中第i 列车运行速度,xi代表第i 列车的位置, xi-xi-1可用于表示第i 列车与第i-1 列车的实际间距, D(vi,vi-1)表示第i 列车与第i-1 列车的理想间距。虚拟耦合列车群中的领航列车,其车头位置、车辆速度、车辆实际加速度分别为x1、v1、

图2 基于虚拟耦合的列车群运行图示Fig.2 Train formation operation based on virtual coupling
虚拟耦合列车群:设采用虚拟耦合模式构建紧密联系的n列车,所构成的集合为G={i|i=1,2…,n},在一定的时间和空间范围内,集合G 中任意列车i 的属性向量为Ai=(ai,1,…,ai,k,…,ai,m), ai,k可表示所在线路、列车运行方向、目的车站等属性,若对于集合G 中的任意两列车i 和j,都满足Ai=Aj,称G 为虚拟耦合列车群。
领航列车:在虚拟耦合列车群G={i|i=1,2…,n}中,设列车i 的紧前列车集合为Fi,若Fi= Ø 成立,则列车i 为该虚拟耦合列车群中的领航列车(又称领航者)。
紧前列车:在虚拟耦合列车群G={i|i=1,2…,n}中,若对于G 中的任意两列车i 和j,以列车群运行方向为正方向,二者位置分别为xi和xj,若xj>xi且不存在满足xj>xk>xi的第三列车k,则列车j为i 的紧前列车。
控制列车:在虚拟耦合列车群G={i|i=1,2…,n}中,设列车i 的紧前列车集合为Fi,若Fi≠Ø 成立,则列车i 为该虚拟耦合列车群中的控制列车。可见,虚拟耦合列车群所组成的队列中,一般只存在一列领航列车,其他都为控制列车。
2.2.2 虚拟耦合列车群运行协同控制方法
基于虚拟耦合列车群运行控制方法旨在通过控制列车群中的每列车紧随其紧前列车运行的方式,实现列车群的稳定协同运行,最终达到列车群安全高效运行的目的。保持列车群稳定协同状态是虚拟耦合列车群运行控制的核心,列车群稳定协同状态是以保证列车群安全运行为提前,提高运行控制效率为目标。通过虚拟耦合列车群运行控制在列车机械性能、运行环境等允许的前提下,最终实现列车群内任意两列车相对速度一致,相邻两列车间的距离为理想间距。两车相对速度一致时列车保持相对静止,在保障安全的同时可以一定程度缩小列车间距,两车之间保持理想间距运行时,能够保证列车的高效运行且不会发生碰撞等安全问题。
列车在区间运行过程中会存在运行条件发生改变的情况,例如进站、出站、区段限速等,列车群的运行状态也会随之调整,原来稳定协同运行状态会遭到破坏,虚拟耦合列车群将进入不稳定状态中。所以在列车群运行过程中,需要通过不断调整列车群的运行状态来适应列车群运行状态的改变,以此实现列车群在区间尽快达到或恢复稳定协同运行的状态,从而使虚拟耦合列车群实现安全高效的运行效果。虚拟耦合列车群运行控制的主要流程,如图3 所示。
3 基于虚拟耦合的列车群体智能控制技术
3.1 基于MAS的虚拟耦合列车群控制规则
根据MAS 模型,虚拟耦合列车群中的每列车的运行控制单元可看作一个Agent,整个虚拟耦合列车群的运行控制则构成了一个MAS 控制系统。虚拟耦合列车群运行控制过程中,为了实现列车群稳定协同运行,每个列车Agent 进行运算和处理主要涉及的关键环节包括列车状态获取、列车群状态判断、列车追踪策略制定和列车群实时动态调控。
1)列车状态获取
列车状态获取是虚拟耦合列车群控制的初始环节。控制列车i 的列车Agent 主要通过列车感知,获取紧前列车i-1 的加速度、控制列车i 与紧前列车 i-1 的速度差和间隔距离,判断列车i 和i-1 的运行状态。
列车i 和列车i-1 相对运行状态根据二者的间距和速差确定,间距关系分别有列车i 与i-1 的间距大于、等于、小于理想间距3 种情况,速差同样有控制列车i 的运行速度大于、等于、小于紧前列车i-1的速度,二者相对关系两两组合,共构成9 种运行状态,如表1 所示。

表 1 列车群中列车状态定义Tab.1 Definition of train state in train formation
2)列车群状态判断
获取列车状态之后,需要对整个列车群的运行状态进行判断。主要根据列车群中任意两相邻列车的相对速度和间隔距离判断整个列车群的运行状态。当列车群中任意两相邻列车速度一致,且列车间隔距离为理想间距,则可认为列车群已经达到理想稳定的运行状态,流程结束。否则,认为列车群未达到理想的协同运行状态,则进入下一步,做出调整策略。
3)列车加速度追踪策略制定及动态调控
针对相邻两列车由于速度差和间隔距离的变化导致的9 种不同运行状态的情况,控制列车i 的列车Agent 制定相对于紧前列车i-1 的追踪运行策略,追踪策略体现为对列车i 的加速度进行调整。列车i 加速度的变化会带来列车i 速度的变化,控制列车i 的列车Agent 通过计算获得列车i 的控制加速度,据此调整列车i 加速度,使列车i 与列车i-1 的速度越来越相近、间距越来越接近理想间距。当任意两列车的速度趋于一致,间距达到理想状态时,则认为虚拟耦合列车群达到了稳定协同的运行状态。
控制列车追踪运行策略的实施,将使得列车的运行状态发生转变。如图4 所示,展示列车的9 种运行状态将随着追踪策略的变化发生转移,最终通过多个过程状态的变化和调整使得列车群中任意的控制列车最终达到理想状态,从而使得列车群达到稳定状态的情况。

图4 基于虚拟耦合的控制列车9种状态转移Fig.4 Nine state transitions for control train based on virtual coupling
3.2 基于MAS的虚拟耦合列车群协同控制模型
根据上述虚拟耦合列车群的控制规则,以实现虚拟耦合列车群系统的稳定协同运行为目标,构建基于MAS 的虚拟耦合列车群协同控制模型[17]。协同控制最终要达到的目标有两个:1)列车群中任意一列车(除领航列车之外)与其紧前列车之间运行距离趋于某一个固定的值(理想间距);2)列车群中各列车速度相同,即任意两列车的相对速度为0。可分别用公式(1)和公式(2)表示。

基于MAS 的协同控制约束主要包括:1)列车的控制输入不能超出列车机械特性限制,可借助列车加速度刻画;2)列车之间的距离小于某一阈值时,应采取制动紧急制动,防止列车之间的距离过小所带来的安全隐患。可分别表示为公式(3)、(4),公式中aacc_max、aabreak_max分别表示列车最大驱动加速度和制动加速度。

根据控制列车i 与其紧前列车i-1 的速度差和间隔距离的关系构建控制列车的多智能体控制方程,进而判断列车所处的状态。此时,控制列车i 与紧前列车i-1 的加速度差Δai可表示为公式(5)。

获得控制列车之间的加速度差后,列车根据列车i-1 的加速度,对列车i 的加速度进行调整,进而改变列车的运行状态,加速度的调整与列车运行9种状态的追踪对应,列车i 的控制加速度可用公式(6)表示。

虚拟耦合列车群多智能体协同控制问题是多智能体编队问题,最终体现在系统的一致性上。多智能体一致性,指在多智能体系统中,各独立单元协同合作,在时间维度上最终达到群体一致的状态。基于MAS 的虚拟耦合列车群协同控制方法可通过构造Lyapunov 函数证明了控制模型的渐进稳定性。
4 基于虚拟耦合的列车群体控制的系统框架及场景验证
4.1 基于虚拟耦合的列车群体控制及调度系统框架
虚拟耦合列车群在运行控制及调度组织方面均具备突出的优势,基于MAS 的虚拟耦合列车群控制方法设计了一种基于多智能体的两层架构的调度及控制系统。打破了传统的中心调度层、车站控制层和车载控制层三层架构的调度及控制系统。
如图5 所示,新提出的调度与控制系统架构将现有的复杂架构简化为两层,包含调度组织层和执行控制层。调度组织层包括调度组织Agent,主要负责发布行车调度指令、进行列车群运行状态监控和列车路径规划。在执行控制层,每列列车为一个列车Agent,多个具有相关关系的列车Agent 组成列车群,列车Agent 主要完成虚拟耦合列车群编队生成、状态保持与解耦,列车群间追踪运行控制。在列车群运行过程中,需要借助地面基础信号设备辅助,在执行控制层加入地面设备Agent。地面设备Agent 主要负责列车与地面设备的联锁安全,通过列车Agent 和地面设备Agent 的协同控制使列车群能够适应复杂线路条件的安全高效运行。
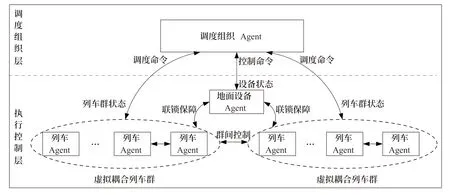
图5 虚拟耦合列车群体控制及调度系统框架示意图Fig.5 Schematic diagram of train formation control and dispatching system based on virtual coupling
基于虚拟耦合的列车控制及调度的两层架构中,各Agent 之间均可以直接通信,高效的通信方式是系统可靠运转的基础。
4.2 场景验证
基于上述系统框架、采用仿真手段对基于MAS的列车协同控制模型的有效性进行验证分析。在仿真场景中,考虑通信信号传输、列车计算处理以及列车加速形成过程的综合延时为400 ms,安全系数取值1.2。仿真实例选取一个由5 列列车构成的列车群,如图6 所示。在假定平坡线路条件下,5 辆列车以不同的运行间距和速度顺序行驶,领航列车初始运行速度300 km/h,并保持匀速。虚拟耦合列车群中,各列车的初始速度范围为293 ~302 km/h,相邻列车初始间距在2 031 ~2 077 m 之间。

图6 基础仿真案例设定Fig.6 Setting for basic simulation cases
在保证初始状态相同的条件下,分别采用基于虚拟耦合和基于准移动闭塞等其他控制方式进行仿真实验,分析了不同场景下列车净距的变化趋势,如图7 所示。考虑一个闭塞分区的定位余量,基于准移动闭塞的5 列车的间距为11 106 m,基于位置的移动闭塞列车间距为8 871 m,基于速度的移动闭塞列车间距为813 m,基于虚拟耦合的列车群速度保持在300 km/h,列车之间的净间距最终稳定在723 m。可见,基于MAS 的列车协同控制方法明显缩减列车追踪间隔、提高列车运行效率。

图7 不同列车控制方式下列车净距随仿真时间变化Fig.7 Clear distance of the train is changed along with simulation time under different train control method
5 基于群体智能的列车控制技术的优势及展望
基于群体智能的列车运行控制技术既有明显的优势,但距离产业应用尚有很长的距离,需在深化复杂环境的基础理论研究、强化系统安全设计技术、加快系统设计及产业化技术研究等方面开展工作。随着车联网和群体智能等新一代信息技术的快速发展,列车运行控制技术发展将面临着由列车空间间隔控制法向列车群体协同控制发展的机遇,列车运行控制系统结构也将面临由地面集中控制系统架构向人机物融合的分布式群体智能系统架构发展演变。
5.1 基于群体智能的列车控制技术的优势
1)基于群体智能的列车控制技术能够大幅提升线路运输能力
根据上述研究,基于虚拟耦合的列车群协同控制方法相较于传统基于闭塞的控制方法最显著的差别就体现在突破传统闭塞理念,缩小列车运行追踪间隔,较既有闭塞模式运行效率明显提升。而基于群体控制的列车控制技术,一个车次可由列车群组成,在不改变轨道、线路等既有设施的条件下可大幅提升运输能力,尤其适用于目前运输能力已经饱和、靠现有技术难以继续提高的繁忙线路。
2)基于群体智能的列车控制技术能够更加适应客流时空分布不均衡的特征
既有的控制模式下,高速铁路列车主要分为长编组和短编组两种,且列车大多以成对的形式开行,其对客流时空分布不均衡的适应性较差,经常出现部分区段座席紧张而部分区段有较高的座位虚糜的现象。基于群体智能的列车控制技术可根据实际客流需求灵活改变列车群的组成,更加契合客流的时空分布特性。
3)基于群体智能的列车控制技术能够有效简化系统层次,提升系统可靠性
我国铁路运输在长期的生产实践中形成了由中心调度、车站控制和车载控制构成的3 层复杂系统架构。而基于群体智能的列车控制技术可有效简化系统层次,能够充分适应和发挥虚拟耦合列车群体协作优势,简化系统架构,提升系统可靠性。
5.2 基于群体智能的列车运行控制技术研究及发展
1)深化复杂环境下的基础理论研究
提升复杂和异常环境下虚拟耦合列车群控制的鲁棒性。考虑列车群进出站解耦和耦合等复杂运行环境,研究通信异常及各种故障异常情况下的运行控制技术,实现高速铁路列车群的高效智能控制,提高基于人工智能技术的高铁列车控制系统的抗干扰性。
多智能体的高速铁路列车群的线性编队运行研究。基于群体智能的控制技术建立并保持列车线性编队运行状态是研究的难点之一,解决列车群队形生成、队形保持、队形切换、编队避障、自适应等是研究的主要方向之一。
基于群体智能列车控制的高效通信机制构建。为了提高列车群的高效控制,需分析群体智能控制技术下列车间通信的关键点,构建高效的列车间通信机制降低通信延时,提高列车群控制的可靠性。
2) 强化安全设计及应用技术研究
展开列车群体智能控制的安全分析。深入分析各种复杂场景下列车群运行的安全性,提出适应群体智能技术风险库的构建方法,并构建风险识别、分析、评价体系。
实现列车运行状态的精准化感知。依托多模定位技术实现列车可信定位,提高测速测距设施设备的灵敏度,提高列车智能感知范围,精准把握列车运行状态。
3)加快系统设计及产业化技术研究
基于人机物融合的分布式智能系统架构理念,分析传统调度及控制系统特征与适应性,刻画基于群体智能列车控制系统的特性,实现列车控制系统的精简与重构。研究基于高速移动通信的高铁车联网技术构建,为列车群体智能控制技术提供技术保障,加快群体智能列车控制技术的实际应用。
形成“计划―调度―控制”三位一体的全新生态体系。进一步实现列车控制与运输需求特征的匹配,充分发挥虚拟耦合列车群模式对轨道交通系统动态客流的适应性,综合推动整个轨道交通系统的运输效能提升。
6 结论
详细分析基于闭塞的铁路列车运行控制方式特征,以车联网和群体智能等新一代信息技术的发展为前提,提出基于虚拟耦合的列车群运行控制技术,阐析并刻画该技术的内涵及群体控制方法。以此为基础,进一步形成“列车状态获取―列车群状态判断―列车加速度追踪策略制定及动态调控”三阶段的列车群控制规则,根据该规则提出基于MAS 的虚拟耦合列车群系统控制模型。接着,优化设计了基于MAS 的虚拟耦合列车群控制方法的“调度组织―执行控制”的双层结构系统,打破了传统的中心调度层、车站控制层和车载控制层3 层架构的调度及控制系统,并基于该设计采用仿真技术验证了方法的有效性。
在基于虚拟耦合的列车群智能控制技术研究的基础上,发现该技术在提升列车运行效率、缓解线路运输能力紧张、适应客流时空分布不均衡、有效简化系统层次等方面均有突出的优势。在未来的研究中,需进一步深化复杂环境基础理论研究、强化安全设计技术、加快系统设计和应用技术研究。
