抹灰机联动机构优化设计
2020-03-04孟宪举赵瑞朝
孟宪举赵瑞朝
(山东建筑大学 机电工程学院,山东 济南250101)
0 引言
在建筑装饰工程中,墙面抹灰是一项工程量大、质量要求严格的工程。 目前,主要采用人工抹灰的方式,机械化程度低、劳动强度大、作业时间长,而且工人的工作能力与素养不同,使无法抹灰质量保证。抹灰机的应用能够节省工期、降低劳动强度,因此抹灰机在建筑工程中有着非常大的需求空间[1-2]。 抹灰机的应用能够提高抹灰效率,有效减少作业时间和项目成本[3-4]。 目前,市场上出现的抹灰机主要有喷涂式抹灰机、半自动抹灰机和全自动抹灰机等3 种。 喷涂式抹灰机多用于外墙面抹灰,自动化抹灰机则用于内墙面抹灰。
现今,国内外专家学者对于抹灰机整体结构、抹灰装置以及已有结构所存在的缺点进行改进的研究比较多,单独对抹灰机联动机构进行优化设计的研究几乎没有。 Bhandari 等[5]指出抹灰机的应用可以加快抹灰进程,有利于减少总成本。 孟宪举等[6]完成了一种抹灰机抹灰装置的设计研究,提出的设计方案能够集盛灰、抹灰、抹平和压实过程于一体,并且可以使抹灰板的余料抹到墙面顶部。 龙腾等[7]与张孝之等[8]分析了国内外抹灰机的发展现状,根据现有抹灰机的结构特点阐明其存在的设计缺陷,并提出了解决方案。 冯爱华等[9]以变异的差动轮系为基础设计了一款差动抹灰机,采用螺旋输送供料、甩灰叶轮离心甩灰、摊灰辊滚压摊开、刮灰板刮平和弹性抹灰压实的连续工作过程,以提高抹灰效率,达到灰浆与墙壁结合性好的要求。 王飞等[10]研究了抹灰机的外部支撑结构、抹灰机构以及横向移动机构,将齿轮齿条用于横向移动机构,既可以带动整个抹灰装置横向移动,又可以起到固定支杆、减少晃动的作用。 阮学云等[11]结合喷浆机的高效率和半自动抹灰机的高密实度等优点,提出一种完全采用气动控制系统的设计方案,抹灰机机械结构各功能的协调实现均由气动控制系统完成。
抹灰机既提高了工作效率又降低了生产成本,促进了建筑装饰工程的发展[12]。 抹灰效果关键取决于抹灰料斗、机体与抹灰板之间能否完美配合联动。 机体上行过程中料斗供灰,抹灰板负责上料;下行过程中料斗停止供灰,抹灰板负责压光。 据此运动规律设计出联动机构为六杆机构,可以保证抹灰机在工作过程中运行平稳、抹灰均匀,同时为其进一步发展提供重要技术支持,甚至可以延伸到具有相似运动规律的其他机械,为其设计研究提供重要参考。
1 联动机构的基本结构和数学模型
1.1 基本结构
联动机构的作用是将抹灰料斗、机体和抹灰板连接起来,达到在一个工作进程中上料、抹灰、压光全部完成的目的。 要求在抹灰机工作的过程中,机体上行时抹灰料斗呈现一定角度的倾斜,自行向抹灰板和墙面之间输送灰浆,抹灰板处于仰角状态,进行上料;机体下行时抹灰料斗平行于地面,不再输送灰浆,抹灰板应该由仰角变为俯角,实现压光工作。同时应考虑到抹灰板在抹灰时不会产生竖直位移,以免反复摩擦墙面同一位置,造成抹灰不均匀等现象。 据此确定六杆机构可以将抹灰料斗、机体和抹灰板三者联动起来,完成上述工作。 六杆机构广泛应用于各种机械产品中,具有以下优点:(1) 采用低副,接触面积大,承载能力强,形状简单,加工制造比较容易,成本也相对较低;(2) 改变各杆件之间的相对长度,机构的运动规律也随之改变,可以根据需要进行调整;(3) 连杆曲线可以满足不同运动轨迹的设计要求,还可以实现远距离传动。
因此,采用六杆机构作为抹灰机的联动机构,其结构简图如图1 所示。 其中,A~G为联动机构各铰接点;1~3、5 为联动机构杆件,4 为滑块,6 为机体,L1~L7分别为AB、BC、CD、DE、DF、GF、BG间的距离,mm;φ1为杆1 与机体夹角,°;φ2为杆2 与机体夹角,°;φ3为杆5 与机体夹角,°;φ4为杆3 与机体夹角,°。
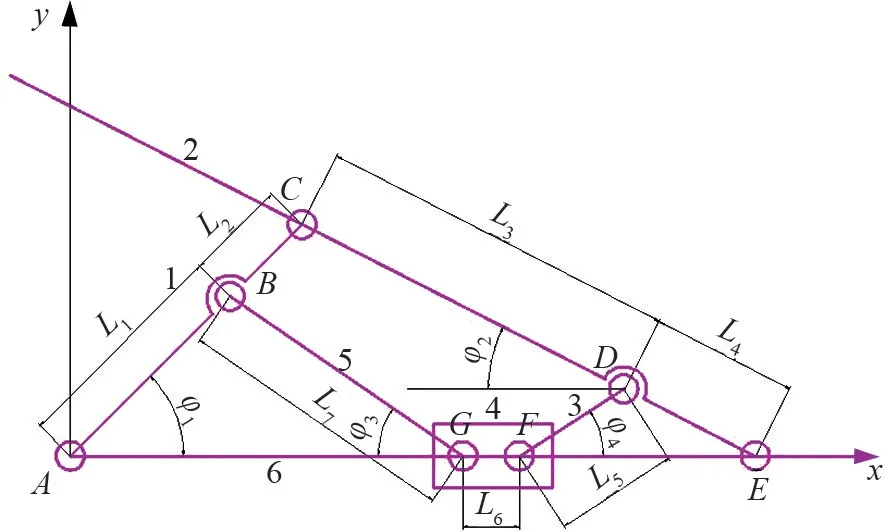
图1 联动机构结构简图
将抹灰料斗置于杆2 上,联动机构于料斗两侧各一个。 当料斗抹灰到顶,接触到天花板后,在天花板的作用下开始下压,A 点与机体连接,相对机体仅做旋转运动;滑块置于机体滑槽内,进行水平移动;各铰接点间相互转动;E 点与抹灰板相连接,要求其在工作过程中水平推动抹灰板;杆2 上端长度可以根据实际料斗的大小进行调整。
1.2 建立数学模型
对于同一个问题往往会提出多个解决方案,并通过各方面的论证从中提取最佳方案。 最优化方法就是专门研究如何从多个方案中科学合理地提取最佳方案的方法。 由于优化问题无所不在,目前最优化方法的应用和研究已经深入到了生产和科研的各个领域,如土木工程、机械工程、化学工程、运输调度、生产控制、经济规划、经济管理等,并取得了显著的经济效益和社会效益。 用最优化方法解决最优化问题的技术成为最优化技术,主要包含(1) 建立数学模型 即用数学语言来描述最优化问题,模型中的数学关系式反映了最优化问题所要达到的目标和各种约束条件;(2) 数学求解 数学模型建好以后,选择合理的最优化方法进行求解。
对联动机构各个杆长进行尺寸优化,首先要建立数学模型[13]。 以A 点为坐标原点,建立如图1 所示坐标系。 分别以Xi、Yi(i=1~7)表示各铰接点(A~G)在x方向和y方向的直角坐标,建立方程由式(1)~(10)表示为
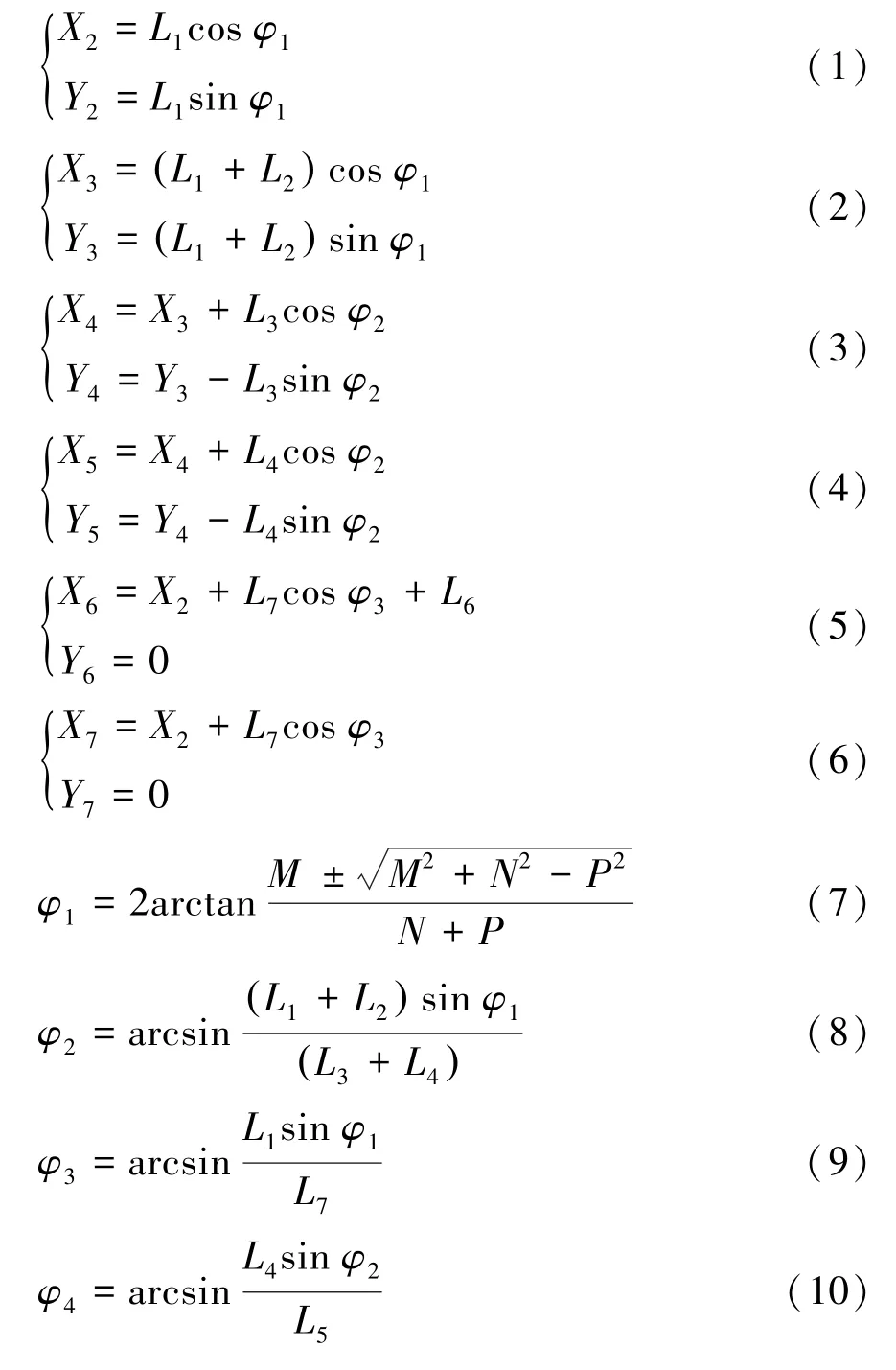
式中:M=2Y2L2;N=2X2L2;P=2L1L2。 将各铰接点间的距离作为抹灰机联动机构的结构参数,用向量表示为L=[L1,L2,L3,L4,L5,L6,L7]。
2 联动机构结构参数优化设计
2.1 优化方法
利用MATLAB 的优化工具箱,可以求解线性规划、非线性规划和多目标规划问题[14]。 在实际工程问题中,两个或两个以上目标同时达到最优值的问题为多目标优化设计问题。 此次设计中,将L1、L2、L3、L4、L5、L6、L7等7 个优化目标参数作为设计变量,属于多目标优化问题[15]。
在MATLAB 软件工具箱中,fmincon 函数可以解决有约束的多元函数最小值问题。 该函数从x0开始,试图在线性不等式ax≤b 下求fun 中描述的函数最小值x。 其调用格式有多种,选择其中一种调用格式如下:
[x, fval, exitflag, output] =fmincon(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon)
fun 为目标函数;x0 为初始值;A、b 为向量,满足线性不等式约束A·x≤b,若没有不等式约束,则取A=[ ]、b =[ ];Aeq、beq 为矩阵,满足等式约束Aeq·x =beq,若没有等式约束,则取Aeq =[ ]、beq=[ ];lb、ub 分别为设计变量线性不等式约束的下界和上界,若没有界,可设lb =[ ]、ub =[ ];nonlcon为非线性约束函数。
2.2 设计变量和目标函数
根据所建立的数学模型可以得知设计变量为L1、L2、L3、L4、L5、L6、L7,即优化目标的参数。
为保证抹灰质量,要求抹灰板不能产生竖直位移,因此为了达到这一目标,要使E点在竖直方向上的位移最小,几乎做水平运动,目标函数f由式(11)表示为

式中:f为目标函数;Y5为E点竖直方向位移,mm。
2.3 约束条件
在实际优化问题中,自变量的取值受到一定的限制,在最优化方法中称为约束条件,相应的优化问题称为约束优化问题。
(1) 在上料时,应保证料斗中的灰浆能够顺利自动流向抹灰板与墙面之间,所以联动机构在初始状态下φ1不应过小,否则当灰浆不足时,无法自行流下。 因此,限制φ1在0~π/3。
此约束不是设计变量的约束条件,而是联动机构本身存在的约束,即在φ1的变化范围内工作,各杆件尺寸的优化设计应该在此工作范围下进行。
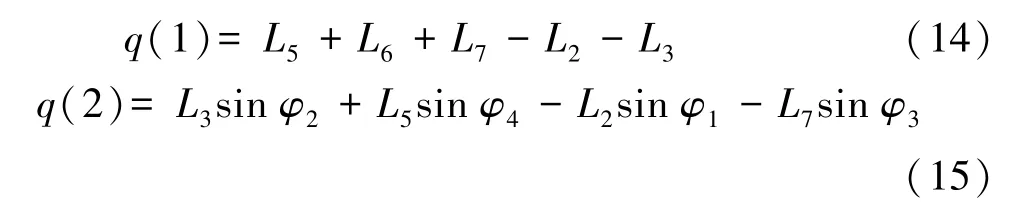
(2) 当上料完毕后,在天花板的作用下开始下压联动机构,E点处做水平运动推动抹灰板,使其变为俯角状态。 完全压平后,要求各杆件位于同一直线上且互相不干涉。 所以,杆件之间的约束由式(12)和(13)表示为

在fmincon 函数中,作为非线性等式约束,分别由式(14)和(15)表示为
2.4 优化结果
抹灰机机体的尺寸为800 mm × 620 mm ×280 mm,根据联动机构运动规律、运动范围和机体大小,确定联动机构各杆件尺寸变化的上下界,并给定尺寸界限范围内的任意3 组初始尺寸,以验证所建立模型的正确性与可行性。 联动机构基本尺寸见表1。
在MATLAB 软件中调用fmincon 函数,输入设计变量、目标函数、约束条件以及基本尺寸,运行程序后得出3 组结果,见表2。

表1 联动机构基本尺寸表/mm

表2 联动机构基本尺寸优化结果表/mm
3 联动机构三维建模与运动学仿真
3.1 三维建模
通过三维建模可以对方案有一个更加直观的认识与了解。 SolidWorks 软件是一款可以用于方案模型的建立及仿真的三维设计软件,具有强大的特征建立能力和零件装配的控制功能,而且简单易操作,还可以与其他设计软件进行数据交换。
由MATLAB 软件优化出的结果得出各杆件长度,利用SolidWorks 软件绘制并装配得出联动机构三维图。 对联动机构的每一个零件进行建模,在所有零件全部完成的基础上进行下一步的装配,完成整个联动机构三维图,如图2 所示。 其中,杆1、2 各有一处折弯,当联动机构处于压平状态时,不仅能够节省空间,还可以使结构更加的紧凑,增加其强度与刚度。 完成三维建模后,检查各个构件之间是否干涉。 在SolidWorks 软件中,通过其自有的分析处理模块,准确迅速地检查出零部件之间存在的干涉现象。
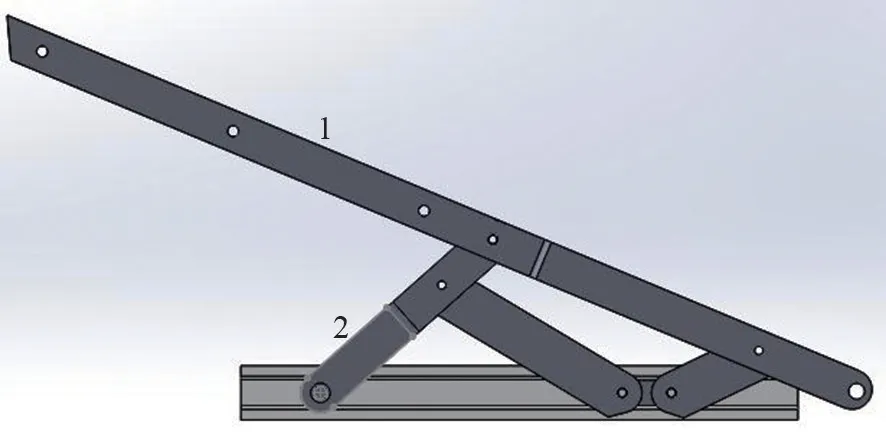
图2 联动机构三维图
3.2 运动学仿真分析
应用机械系统动力学自动分析软件ADAMS(Automatic Dynamic Analysis of Mechanical Systems)
对抹灰机联动机构进行运动学分析,得到了抹灰机联动机构的运动规律[16]。
利用SolidWorks 建立的三维实体模型需要导入ADAMS 中,数据交换可以通过ADAMS 中的ADAMS/Exchange 模块完成。 该模块可以直接识别SolidWorks 中的数据,得到的几何数据更为精确。数据交换还可以通过别的方式进行交换,如通过传统的x_t 或者iges、step 等中间格式进行转换。
此设计中,将联动机构三维图另存为“x_t”格式,以便在ADAMS 软件中导入,进行运动学分析。将联动机构的模型导入到ADAMS 软件中后,把没有相对运动关系的零部件组成一个构件。 联动机构模型中共包括6 个构件,对应的名称及物理原型见表3。
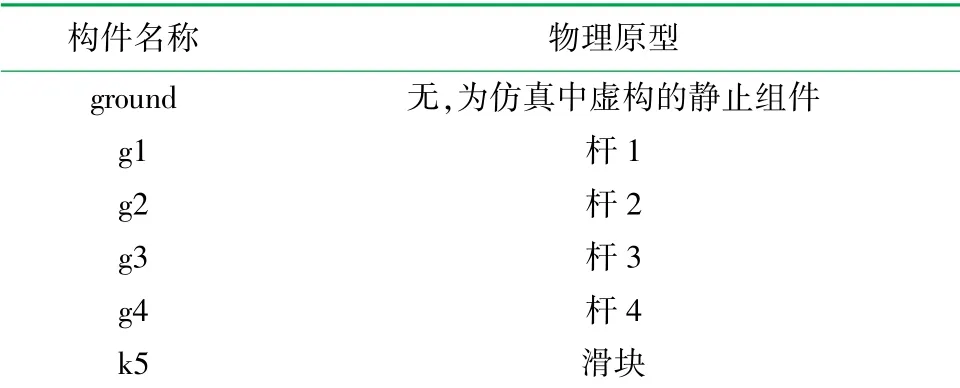
表3 构件名称及物理原型表
各组件间没有关联,相互独立,为实现仿真结果还需要按照实际运动关系对联动机构添加约束与驱动。 各铰接点之间添加转动副,滑块与ground 之间添加水平移动副,同时于E点孔中心处创建标记点MARKER-17。 创建的仿真模型如图3 所示。
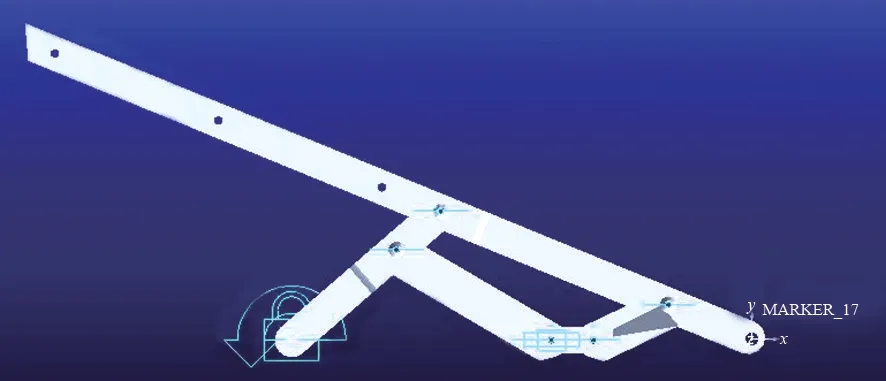
图3 联动机构仿真模型图
模拟仿真出联动机构的运动状态,得出3 组基本尺寸下优化前后标记点MARKER-17 在匀速下压过程中竖直方向(y方向)上的位移变化曲线,如图4~6 所示。
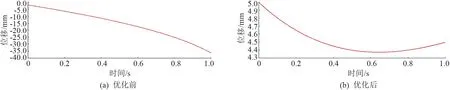
图4 初始值1 优化前后MARKER-17 位移曲线图
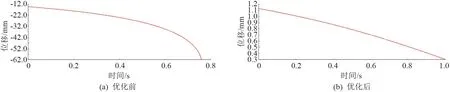
图5 初始值2 优化前后MARKER-17 位移曲线图
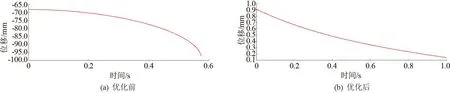
图6 初始值3 优化前后MARKER-17 位移曲线图
由 图5和6可以看到,优化前,标记 点MARKER-17 在运动过程中,y方向位移变化较大,优化后位移变化<1 mm,在误差范围内,可以近似认为联动机构在工作过程中运行正常,做水平直线运动,满足相关设计要求。
4 结论
文章采用MATLAB 软件编制优化程序,对抹灰机进行杆长优化设计,并通过SolidWorks 软件三维建模后,导入至ADAMS 软件中进行运动学分析。主要结论如下:
(1) 六杆机构作为联动机构可以实现抹灰机工作过程中要求的目标动作:连接抹灰料斗、机体与抹灰板,机体上行过程中抹灰料斗负责供灰,抹灰板负责上料;抹灰到顶后,在天花板作用下联动机构开始下压,直至压平,联动机构各杆件处于同一直线上,此时抹灰料斗不再供灰,抹灰板由仰角状态变为俯角状态,开始压光工作;联动机构下压过程中,与抹灰板相连接处做水平直线运动,保证抹灰效果符合工作要求。
(2) 采用MATLAB 工具箱中的fmincon 函数进行优化,并得出联动机构各杆件尺寸,根据优化结果建立三维模型,然后导入至ADAMS 软件中进行模拟仿真,得出标记点在y方向上的位移变化<1 mm,处于误差范围内,满足要求。
