多雷达/声呐场景下的去相关无偏量测转换模型
2020-03-03毛艳慧汪跃龙程为彬
毛艳慧 汪跃龙 程为彬


摘 要: 多雷达/声呐跟踪场景中,笛卡尔坐标系由于测量转换过程中依赖相同的估计状态,不同雷达/声呐量测转换的误差常是相关的。文中充分考虑这一相关性,给出了两维及三维笛卡尔坐标系下的去相关无偏量测转换模型,及计算互相关性的解析形式,并采用相对的估计性能评估准则来验证所提算法的性能。仿真示例表明,考虑互相关后滤波性能明显优于经典无偏量测转换方法。
关键词: 目标跟踪; 非线性量测; 无偏转换; 雷达/声呐跟踪; 去相关; 性能评估
中图分类号: TN98?34 文献标识码: A 文章编号: 1004?373X(2020)01?0114?05
Decorrelated unbiased measurement conversion model
for situation of multiple radars or sonars
MAO Yanhui 1, 2, WANG Yuelong1, CHENG Weibin1
Abstract: When tracking with multiple radars or sonars in Cartesian coordinates, the errors of converted measurements are correlated across radar or sonar stations due to their dependency on the same estimation state. In this paper, this cross?correlation is fully considered, a closed form of the cross?covariance across radars or sonars is presented for both 2D and 3D Cartesian coordinates, and the analytical form of cross?correlation is calculated. Two relative estimation performance evaluation metrics are then adopted to illustrate the performance of the algorithm. The simulation results show that the filtering performance of this method considering cross?correlation is obviously superior to the original unbiased conversion in most cases.
Keywords: target tracking; nonlinear measurement; unbiased conversion; radar/sonar tracking; de?correlation; performance assessment
0 引 言
在跟踪问题中,传感器常提供目标在传感器坐标下的量测(三维中为球坐标,二维中为极坐标),而目标的运动常在笛卡尔坐标中进行[1]。一个自然且常用的方法是把量测模型从传感器坐标系转换到笛卡尔坐标系中,进而可以在笛卡尔坐标系中应用卡尔曼滤波器进行跟踪[2?6]。
量测模型转换方法很多。现有的经典方法[7]是在一定径向距离?角度测量误差范围内,进行量测转换,但给出的是有偏且不一致的估计[8]。文献[7]通过对转换后的量测加上一个偏差补偿,提出一种去偏差的量测转换方法。文献[9]利用经典量测转换方法中偏差的乘性本质,通过给转换后的量测乘上一个因子,提出乘法形式的无偏转换方法(Unbiased Conversion of Measurement Model,UCM)。文献[10]指出文献[9]中转换后量测噪声的均值和协方差存在相容性问题,并给出了修正。
通常在传感器坐标下(即三维球坐标和二维极坐标),传感器间的量测噪声是独立不相关的。但由于转换后的量测依赖于状态,各传感器间转换后的量测误差将彼此相关[11?12]。这一相关性对提高多传感器跟踪性能有很大帮助。在多传感器场景下,针对如何计算这一相关性并提高跟踪性能的问题,本文首先分析了原始无偏量测转换算法在多传感器情况下的缺陷;接着,基于此分析,给出了二维和三维笛卡尔坐标下考虑互相关性的解析形式。
对估计算法的性能评估,广泛应用的均方根误差度量(Root Mean Square Error,RMSE)有一定缺陷,最为明显的是它受大的误差主导[11]。因为几何均值既不受大的误差值主导也不受小的误差值主导,文献[12]中推荐使用几何均值,以得到一个较为公正的评估结果。但由于均方根误差和几何均值没有相对的参考量,只是绝对度量误差各自意义上的平均值,所以对场景敏感[13]。如,估计误差[x=1]对估计量[x=100]是1%,而对估计量[x=2]是50%,若仅仅用绝对误差度量是不公平的。基于几何均值的相对度量,贝叶斯估计误差商(Bayesian Estimation Error Quotient,BEEQ)更适合比较带有不同先验信息或数据的估计器,可给出更好的评估结果[14?15]。
本文采用BEEQ和EMER来评估考虑互相关后相对于先验信息和量测数据的改进,仿真结果表明考虑互相关性后的无偏量测转换方法在大多数情况下明显优于原始的无偏量测转换方法,清楚地揭示了考虑这一互相关的重要性。
1 问题描述
在多雷达/声呐场景下,二维极坐标时,其量测信息包括目标的径向距离和方位角。传感器坐标中的径向距离和方位角分别为:
[rlm=r+vlrβlm=β+vlβ, l=i,j] (1)
式中:[r,β]分别为目标真实的径向距离和方位角;上标[l]代表第[l]个传感器;[vlr,vlβ]分别为第[l]个传感器的量测噪声,且彼此独立,均值为零,方差分别为[σ2r,σ2β]。
三维球坐标时,量测的径向距离、方位角和俯仰角分别为:
[rlm=r+vlrβlm=β+vlβ, l=i,jεlm=ε+vlε] (2)
式中:[r,β,ε]分别为目标真实的径向距离、方位角和俯仰角;[vlr,vlβ,vlε]分别为第[l]个传感器的量测噪声,且彼此独立,均值为零,方差分别为[σ2r,σ2β,σ2ε]。
基于上述方程,要解决的问题是如何在笛卡尔坐标中充分利用传感器坐标转换过来的量测信息,精确估计目标的真实位置。
2 考虑互相关时的无偏量测转换
2.1 经典的无偏量测转换方法
以二维情况为例,通过极坐标到笛卡尔坐标的转换,第[l]个雷达的转换量测为:
[xlmylm=rlmcos βlmrlmsin βlm] (3)
若方位角噪声[vlβ]概率密度函数关于[y]轴对称,对式(3)取期望得到:
[Εxlmylm=λβrcos βλβrsin β] (4)
式中[λβ=Εcos vlβ]。假定[λβ≠0],UCM提出的无偏转换为:
[xu,lmyu,lm=λ-1βrlmcos βlmλ-1βrlmsin βlm] (5)
量测模型可重写为:
[xu,lm=x+xu,lm-xyu,lm=y+yu,lm-y] (6)
转换后的量测误差为:
[xu,lm=xu,lm-xyu,lm=yu,lm-y] (7)
测量噪声协方差为:
[Rlp=covxu,lmyu,lmrlm,βlm=R11,lpR12,lpR21,lpR22,lp] (8)
经典的无偏转换方法给出:
[R11,lp=varxu,lmrlm,βlm=(λ-2β-2)(rlm)2cos2βlm+12[(rlm)2+(σlr)2](1+λ′βcos 2βlm)R22,lp=varyu,lmrlm,βlm=(λ-2β-2)(rlm)2sin2βlm+12[(rlm)2+(σlr)2](1-λ′βcos 2βlm)R12,lp=covxu,lm,yu,lmrlm,βlm=(λ-2β-2)(rlm)2sin βlmcos βlm+12[(rlm)2+(σlr)2]λ′βsin 2βlm] (9)
式中:[λβ=Ecos vlβ;λ′β=Ecos 2vlβ]。
經典的UCM方法因为只考虑单部雷达的量测转换后的协方差,忽略了雷达之间的互相关性,因此应用于多雷达系统时,无法保证估计的无偏性和精确性,仅仅适用于单个雷达的场景。
2.2 多传感器时UCM的性能分析
用多个传感器进行跟踪时,转换后的量测误差不同传感器间是互相关的。在多传感器时,如果忽略了这种相关性,滤波器性能很有可能发散。一个可行的方法是把所有来自多传感器转换后的量测叠起来形成一个向量,然后考虑转换量测误差间的互相关性,使用中心式融合进行滤波。
给定来自传感器[i,j]的量测[zim,zjm],转换后的量测误差记为[eu,im=xu,imyu,im′],[eu,jm=xu,jmyu,jm′]。将两个误差叠起来得到[eu,im′,eu,jm′′],然后记[R]为增广的协方差矩阵:
[R=RipRi,jRi,jTRjp] (10)
其对角块可以通过式(9)计算得到。非对角块在下节进行推导。
2.3 互相关性的推导
由于单传感器情况下真实的协方差依赖于目标真实的径向距离和真实的俯仰角,这在现实中常常是得不到的。在式(9)中,UCM是直接基于观测给出的[Rlp],为了与对角块[Rip,Rjp]一致,本文非对角块[Ri,j]推导仍然基于观测。
2.3.1 二维情况下互相关性的推导
给定来自传感器[i,j]的两个无偏转换量测[zu,im,zu,jm],记[R]非对角块为[Ri,j=r11r12r21r22],于是有:
[r11=cov(xu,im,xu,jmrim,βim,rjm,βjm)=Eλ-1βrimcos βim-(rim-vir)cos(βim-viβ)[λ-1βrjmcos βjm-(rjm-vjr)cos(βjm-vjβ)]rim,βim,rjm,βjm=λ-2βrimrjmcos βimcos βjm-rimrjmcos βimcos βjm-rimrjmcos βjmcos βim+λ2βrimrjmcos βimcos βjm=(λ-1β-λβ)2rimrjmcos βimcos βjm (11)]
类似的,可得:
[r12=cov(xu,im,yu,jmrim,βim,rjm,βjm)=(λ-1β-λβ)2rimrjmcos βimsin βjmr21r21=cov(yu,im,xu,jmrim,βim,rjm,βjm)=(λ-1β-λβ)2rimrjmsin βimcos βjmr22=cov(yu,im,yu,jmrim,βim,rjm,βjm)=(λ-1β-λβ)2rimrjmsin βimsin βjm] (12)
简单起见,这里假设量测噪声[vlr,vlβ],[l=i,j]有相同的统计量,即[E[vir]=E[vjr]=0],[var(vir)=var(vjr)=σ2r],但可直接推广到非同分布的情况。
明显地,若[λβ≠0],扩展后协方差阵的非对角块明显非零。条件[λβ≠0]对单峰和[[-a,a](a<π)]上均匀分布的情况是合理的[4]。
多雷达/声呐传感器场景下进行跟踪时,滤波中同时用到式(10)~式(12)。直观上,考虑互相关性后,应用了更多有效信息,相较经典的无偏转换方法跟踪性能的改进,将在仿真部分进行验证。
2.3.2 三维情况下互相关性的推导
三维情况下的无偏转换为:
[xu,lm=λ-1βλ-1εrlmcos εlmcos βlmyu,lm=λ-1βλ-1εrlmcos εlmsin βlmzu,lm=λ-1εrlmsin εlm] (13)
三维情况下的[Ri,j]可以类似得到:
[r11=(λ-1βλ-1ε-λβλε)2rimrjmcos εimcos βimcos εjmcos βjmr12=(λ-1βλ-1ε-λβλε)2rimrjmcos εimcos βimcos εjmsin βjmr13=(λ-1βλ-2ε-λβ-λ-1β+λβλ2ε)rimrjmcos εimcos βimsin εjmr21=(λ-1βλ-1ε-λβλε)2rimrjmcos εimsin βimcos εjmcos βjmr22=(λ-1βλ-1ε-λβλε)2rimrjmcos εimsin βimcos εjmsin βjmr23=(λ-1βλ-2ε-λβ-λ-1β+λβλ2ε)rimrjmcos εimsin βimsin εjmr31=(λ-1βλ-2ε-λβ-λ-1β+λβλ2ε)rimrjmsin εimcos βjmcos εjmr32=(λ-1βλ-2ε-λβ-λ-1β+λβλ2ε)rimrjmsin εimsin βjmcos εjmr33=(λ-1ε-λε)2rjmrjmsin εimsin εjm] (14)
式中:[λβ=E(cos vlβ)];[λε=E(cos vlε)]。
三维情况下扩展后的协方差矩阵,明显地,若[λβ≠0],扩展后协方差阵的非对角块明显非零。亟需考虑多雷达/声呐间互相关信息。
3 性能评估准则
3.1 贝叶斯估计误差商
BEEQ是用来评估贝叶斯估计的一种相对度量[7]。对于动态的估计器,它刻画了估计精度相对于预测估计的改进,对参数估计器可以理解為估计[x]相对于先验[x]的改进。其定义为:
[r*(x)=AEE(x)AEE(x)=i=1Mxi-xii=1Mxi-xi] (15)
式中:[M]为总的蒙特卡洛次数;[xi,xi]为第[i]次蒙特卡洛实验的待估量和估计量;[xi]为第[i]次蒙特卡洛实验的先验均值或者预测值。
3.2 均方根误差度量
目前工程中广泛应用的性能评估指标为均方根误差(RMSE),其具体定义为:
[RMSE(x)=1Mi=1Mxi212] (16)
式中:[M]为蒙特卡洛实验次数;[i]表示第[i]次蒙特卡洛实验;记[x,x]为待估量和估计量;估计误差[x=x-x];[xi=x′ixi12]。
4 仿真示例及结果分析
RMSE和GAE因为没有任何的参考量,所以都是绝对的度量,即使是对同一场景,它们对先验信息和数据精确度都表现敏感。而相对的误差度量比绝对的度量更能揭示内在的误差性能。采取BEEQ和EMER分别来评估不同的先验信息和数据,[x]相对于[x]和[x]的精度提高。针对不同的应用场景来比较考虑互相关性后的量测转换算法对估计性能的提高。仿真部分用UCM?C表示本文提出的考虑互相关后的无偏量测转换算法,用UCM表示原始的无偏量测转换算法。
传感器坐标中量测为:
[rmβm=h(x)+v=x2+y2arctanyx+vrvβ] (17)
式中[x=[x,y]]表示目标在笛卡尔坐标系中的真实位置。假设[vr,vβ]为零均值的高斯噪声,彼此独立,方差分别为[σ2r,σ2β],[x,y=[-5 000,20 000],σr=100] m。
4.1 场景一:方位角测量误差[σβ=0.1]
在这一场景中,方位角测量误差[σβ=0.1]。如图1所示,UCM?C的性能显著优于UCM。在传感器坐标中角度测量误差变大的情况下,带有噪声的角度测量将导致转换量测误差间的强相关,因为因子[(λ-1β-λβ)2]进一步变大。UCM完全无视这种相关性,本文提出的UCM?C考虑了这种相关性。在此场景下,即使[α]增大到了10,二者性能之间的差别仍然存在。
UCM?C的BEEQ曲线从1变到了0.4,这表明此场景中,随着传感器量测精度的变差,数据的贡献变小了。尽管如此,UCM的BEEQ曲线在[α]大于5之前,其值都大于1。而UCM?C的BEEQ曲线一直低于1。与场景一相比,两种算法的RMSE曲线显著增大到了300。
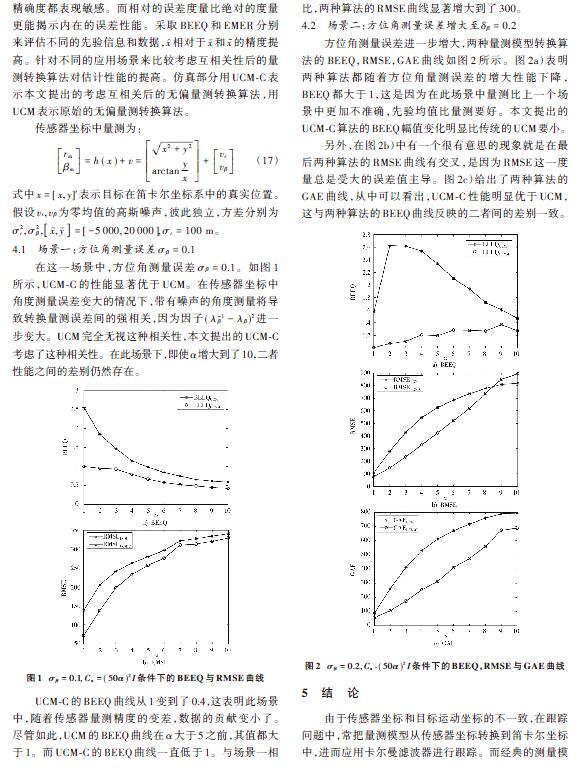
4.2 场景二:方位角测量误差增大至[δβ=0.2]
方位角测量误差进一步增大,两种量测模型转换算法的BEEQ,RMSE,GAE曲线如图2所示。图2a)表明两种算法都随着方位角量测误差的增大性能下降,BEEQ都大于1,这是因为在此场景中量测比上一个场景中更加不准确,先验均值比量测要好。本文提出的UCM?C算法的BEEQ幅值变化明显比传统的UCM要小。
另外,在图2b)中有一个很有意思的现象就是在最后两种算法的RMSE曲线有交叉,是因为RMSE这一度量总是受大的误差值主导。图2c)给出了两种算法的GAE曲线,从中可以看出,UCM?C性能明显优于UCM,这与两种算法的BEEQ曲线反映的二者间的差别一致。
5 结 论
由于传感器坐标和目标运动坐标的不一致,在跟踪问题中,常把量测模型从传感器坐标转换到笛卡尔坐标中,进而应用卡尔曼滤波器进行跟踪。而经典的测量模型转换方法忽视了转换后量测误差之间的相关性,本文在分析经典的模型转换量测方法在多传感器场景中的局限性后,给出了二维和三维笛卡尔坐标下考虑互相关性的解析形式。仿真结果表明,考虑互相关性后的无偏量测转换方法在大多数情况下明显优于经典的无偏量测转换方法。
参考文献
[1] LI X R, JILKOV V P. A survey of maneuvering target tracking—part III: measurement models [C]// Proceedings of SPIE Confe?rence on Signal and Data Processing of Small Targets. San Diego, CA, USA: [s.n.], 2001: 423?446.
[2] WANG W, LI D, JIANG L. Best linear unbiased estimation algorithm with Doppler measurements in spherical coordinates [J]. Journal of systems engineering and electronics, 2016, 27(1): 128?139.
[3] ZHOU G J, GUO Z K, CHEN X, et al. Statically fused converted measurement Kalman filters for phased?array radars [J]. IEEE transactions on aerospace and electronic systems, 2018, 54(2): 554?568.
[4] BORDONARO S, WILLETT P, BAR?SHALOM Y. Consistent linear tracker with converted range, bearing and range rate measurements [J]. IEEE transactions on aerospace and electronic systems, 2017, 53(6): 3135?3149.
[5] 林海涛,钟海俊,王斌,等.基于相关滤波的目标快速跟踪算法研究[J].现代电子技术,2018,41(2):21?25.
[6] 陈士超,刘明,卢福刚,等.基于稀疏描述的SAR目标方位角估计算法[J].现代电子技术,2017,40(12):132?135.
[7] LERRO D, BAR?SHALOM Y. Tracking with debiased consistent converted measures vs. EKF [J]. IEEE transactions on aerospace and electronic systems, 1993, 29(3): 1015?1022.
[8] MO L B, SONG X Q, ZHOU Y Y, et al. Unbiased converted measurements for tracking [J]. IEEE transactions on aerospace and electronic systems, 1998, 34(3): 1023?1027.
[9] DUAN Z S, HAN C Z, LI X R. Comments on unbiased converted measurements for tracking [J]. IEEE transactions on aerospace and electronic systems, 2004, 40(4): 1374?1377.
[10] LI X R, ZHI X R, ZHANG Y M. Multiple?model estimation with variable structure—Part III: model?group switching algorithm [J]. IEEE transactions on aerospace and electronic systems, 1999, 35(1): 225?241.
[11] BLACKMAN S S. Multiple target tracking with radar applications [M]. [S. l.]: Artech House, 1986.
[12] LI X R, ZHAO Z L. Evaluation of estimation algorithms part I: incomprehensive measures of performance [J]. IEEE transactions on aerospace and electronic systems, 2006, 42(4): 1340?1358.
[13] ZHAO Z L, LI X R, ZHU Y M. Interaction between estimators and estimation criteria [C]// 2005 7th International Conference on Information Fusion. Philadelphia, PA, USA: IEEE, 2005: 6.
[14] LI X R, ZHAO Z L, DUAN Z S. Error spectrum and desira?bility level for estimation performance evauation [C]// Procee?dings of Workshop on Estimation, Tracking and Fusion: A Trbute to Fred Daum. CA, USA: [s.n.], 2007: 556?563.
[15] ZHAO Z L, LI X R. Two classes of relative measures of estimation performance [C]// 2007 10th International Conference on Information Fusion. Quebec, Que., Canada : IEEE, 2007: 1?7.
作者简介:毛艳慧(1982—),女,博士后,讲师,主要研究方向为状态估计、目标跟踪。
汪跃龙(1965—),男,教授,主要研究方向为智能控制、导向钻井井下控制技术。
程为彬(1970—),男,教授,主要从事载体姿态测量方向研究。
