多功能楼梯护栏清洁一体机
2020-02-29付琳孙鲁青陈旭朱永强苏洲李育梁
付琳 孙鲁青 陈旭 朱永强 苏洲 李育梁
摘 要:随着城市中高层建筑不断增多,传统的人工清洁楼梯效率低、劳动强度大,无法及时满足人们对办公及住宅楼的室内环境要求。文章设计了一款楼梯护栏清洁一体机,采用3D打印异型钩爪为支点带动曲柄旋转,配合两个差速轮控制及红外传感器检测,实现了设备的前进、转向及避障功能。此外,通过丝杠传动和带传动分别实现了台阶方向的水平运动和护栏方向的上下运动,并采用多角度卡盘满足不同的护栏坡度。现场测试表明,该一体机能够实现楼梯台阶、护栏、扶手的自动清洁功能,清洁效果较好,具有一定的应用和推广价值。
关键词:楼梯;清洁;自动化
中图分类号:TP242 文献标志码:A 文章編号:2095-2945(2020)06-0086-03
Abstract: With the increasing number of high-rise buildings in the city, the traditional manual cleaning stairs have low efficiency and high labor intensity, which cannot timely meet people's requirements for the indoor environment of office and residential buildings. This paper designs a stair and guardrail cleaning machine, which uses 3D printed special-shaped hook as the fulcrum to drive the crank to rotate, and combines with two differential wheel control and infrared sensor detection to realize the equipment's forward, steering and obstacle avoidance. In addition, the horizontal movement along the step direction and vertical movement along the guardrail direction are realized through the screw and belt drive respectively, and multi-angle chuck is adopted to meet different guardrail slope. The test shows that the machine can realize cleaning function of stair, guardrail, and handrail automatically, which has good cleaning effect and the value for application and promotion.
Keywords: stairs; cleaning; automation
1 概述
近年来,随着城市基础建设的高速发展,高层建筑不断增多,高楼大厦已成为城市发展的重要象征。电梯已经基本取代普通楼梯成为人们日常上下行的重要工具,但是当停电或火灾等情况发生时,楼梯作为生命安全通道发挥着重要作用,日常保洁工作仍必不可少,由于高层楼梯台阶数多,楼梯、护栏及扶手等部位的清洁任务非常繁重,人工清洁的效率低、劳动强度大,未来采用人工智能产品实现自动化劳动已经是必然的趋势[1]。因此,设计一种能够对楼梯、护栏及扶手进行一体化清洁的自动化产品具有较高的应用价值和推广前景。
通过调研和查阅相关文献资料,目前市场上主要是面向家用的清洁机器人,能自动完成对地面、窗户等清理工作,一般包括防碰撞感应、自动充电、自主路径规划等系统,可以通过WIFI实现远程控制,技术相对成熟。而相比室内的平面清洁,台阶型楼梯的清洁要求更为复杂,市场上尚无成熟的类似产品,仅有少数处于研究阶段的方案设计。例如,樊红卫[2]提出了一种箱体式楼梯清洁机器人,实现了楼梯爬升运动和原地转向运动;姜雪梅[3]设计了一款基于双臂协调控制的楼梯清洁机器人,用丝杠实现了升降迈步,将车轮与舵机结合实现无半径转弯,实现了纵向行进与横向拖动的工作模式转换。羊月生[4]申请了一种楼梯扶手清洁机器人专利,采用自动爬行上升的拱形单位体作为运载器,使用履带进行驱动;郑祥模[5]发明的楼梯扶手清洁机器人,其攀爬机构由往复推进结构和夹持转动机构组成。宋金磊[6]提出通过滚轮与本体支架设计使清洁机器人卡紧楼梯扶手并且具有一定的爬行和转弯能力。
2 机械结构设计
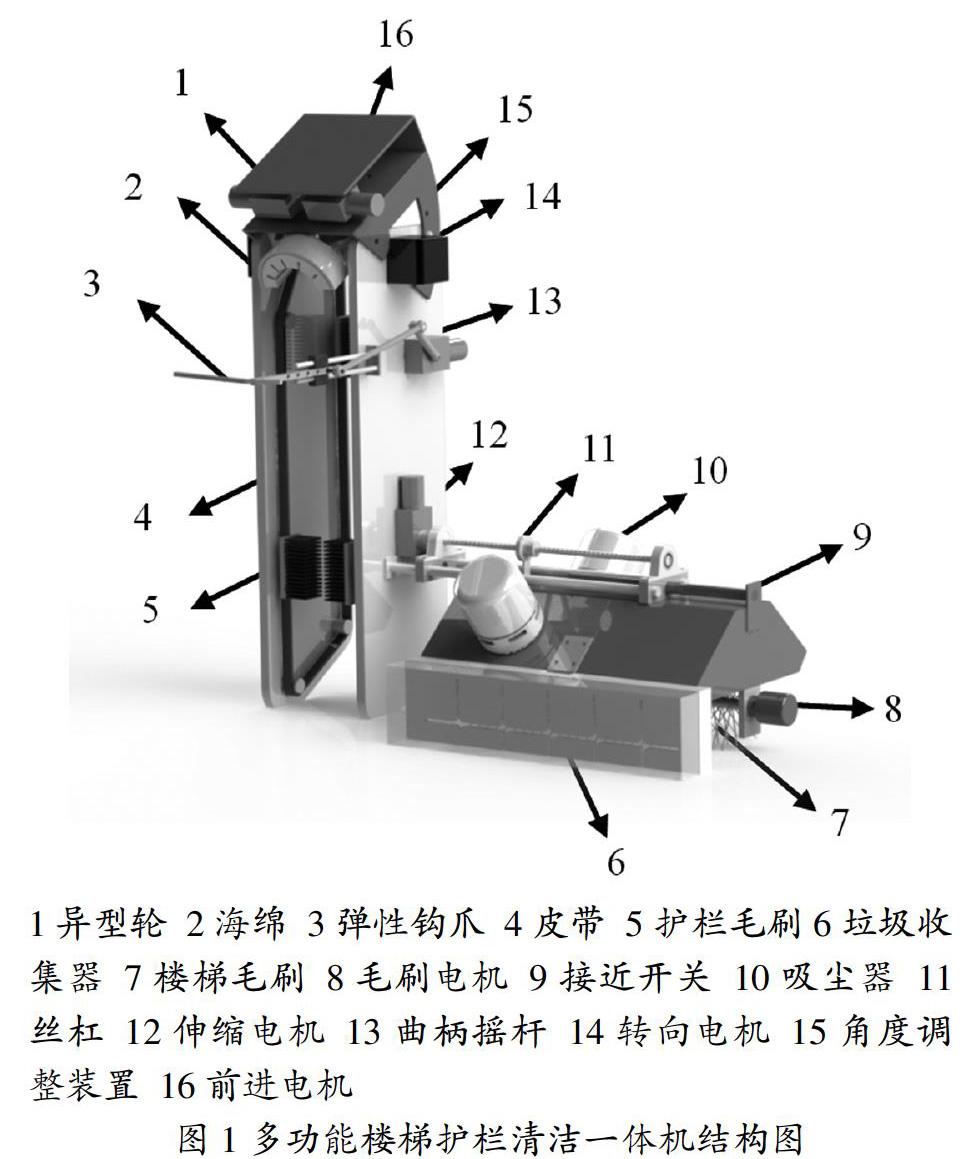
根据清洁工作的需要和分析楼梯台阶、护栏及扶手的结构特点,本产品的机械系统共分为前进机构、转向机构、调整机构、清洁机构四部分,整体结构如图1所示。产品总重量为10kG,结构紧凑、拆装方便,从而实现了体积小、成本低,续航时间长。机身主体支撑结构采用ABS板材料,韧性好,能承受较大的力,并具有一定的防水性能。
2.1 前进机构
基于曲柄滑块机构思想,以3D打印的异型钩爪为支点,电机带动曲柄旋转,配合导向轮实现直线间歇运动与水平清扫运动协调配合。前进机构由两部分提供动力,一是两个异型轮的夹持转动,实现机器沿扶手前进,二是曲柄摇杆机构配合自制异型钩爪,曲柄旋转带动钩爪向前伸,钩住栏杆后曲柄继续转动,带动整体前进。
2.2 转向机构
通过接近开关识别楼梯护栏的拐角位置,此时顶部两个异形轮进行差速控制,外侧转向轮速度增大,内侧轮速度减小,最终实现机器的整体转向,进入下一层楼梯。
2.3 调整机构
调整机构一方面针对楼梯的不同宽度,采用多级丝杠实现可自动伸缩要求;另一方面采用多角度卡盘的结构形式,通过手动调节卡扣位置来适应不同坡度的楼梯护栏。
2.4 清洁机构
清洁机构由护栏清洁和台阶清洁两部分组成,一是通过皮带带动毛刷上下运动,实现包裹式清洁栏杆;二是利用丝杠传动实现台阶方向的清扫,安装有电动滚刷和微型吸尘器,实现护栏楼梯一体化清洁。
3 控制系统设计
启动设备后,机器在顶部四个异型轮的带动下开始转动,曲柄摇杆配合钩爪拉动机器前进,实现间歇式移动;台阶清洁机构通过丝杠传动伸出,末端传感器识别障碍物,机构收回,进入下一层台阶。同时,滚筒毛刷一直转动,将垃圾扫入垃圾袋中,吸尘器将尘埃吸入,护栏清洁机构始终工作,通过控制电机正反转实现毛刷的上下移动,对护栏进行清洁。
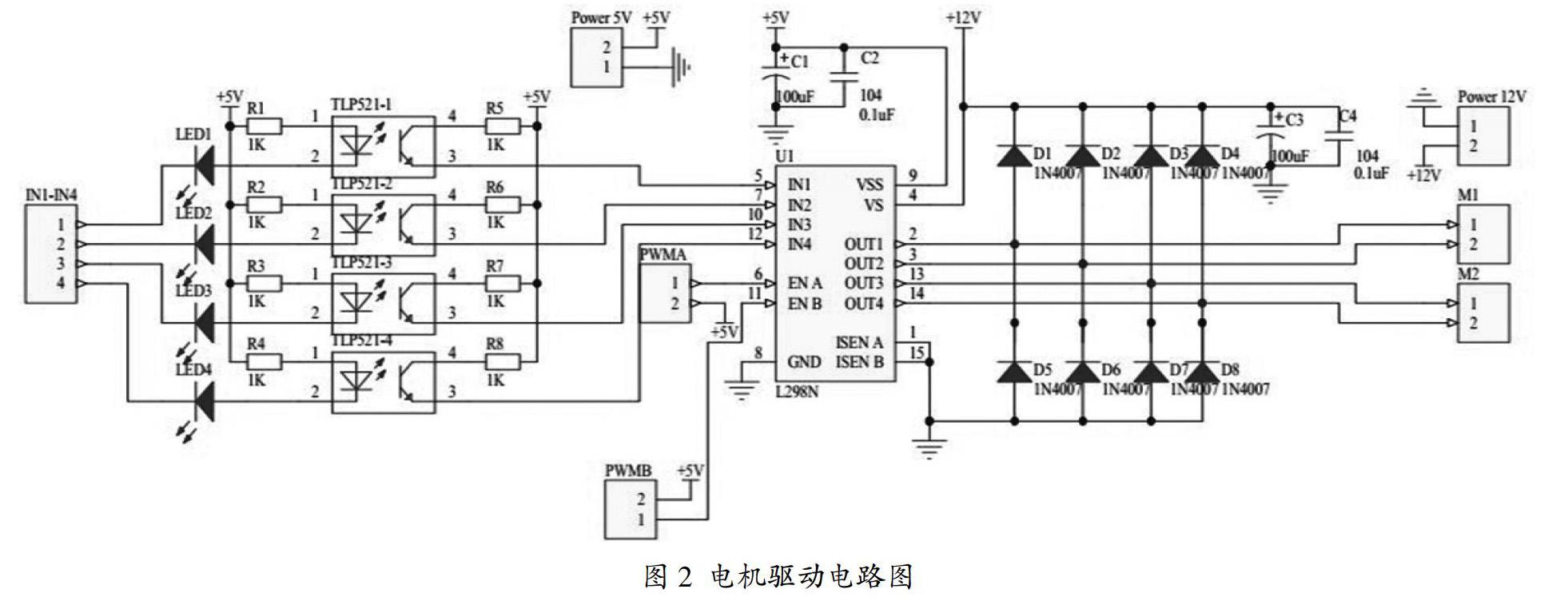
本控制系统以STM32单片机作为核心,采用控制器+L298N驱动+电机的控制框架,配合接近开关,实现各功能的协调运动控制,从而实现整体结构的前进、转向、避障及清扫等各种动作。其中,电机驱动的电路是控制系统的核心,电路原理如图2所示。
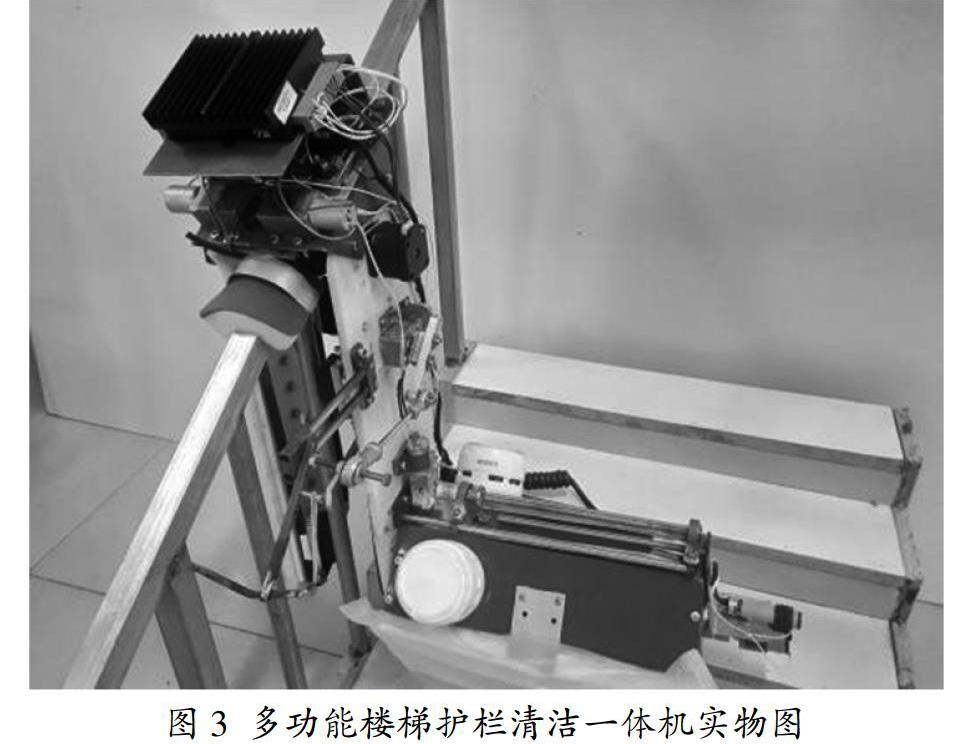
4 样机测试
基于以上设计方案,研制产品样机并进行了试验验证,检验了其原理和结构的可行性,如图3所示。经试验验证,该楼梯护栏清洁一体机结构紧凑,可适应当前试验范围内绝大多数台阶的高度和宽度,适应不同坡度的楼梯扶手,适应性较强。楼梯沿护栏扶手的爬升运动和转向运动均可实现,能完成基本的楼梯清洁任务,实现了预期目标。
5 结束语
本文設计研制的产品主要用于楼梯台阶、护栏以及扶手的自动化清洁,经现场测试表明,系统具有较高的稳定性、可靠性,并在以下三个方面具有一定的创新性。
(1)应用上的创新。目前市场上尚无成熟的同类产品,相关的研究文献和专利也很少,因此设计和研制本产品对于提高清洁效率、降低人工成本具有较大的应用和市场前景。
(2)结构上的创新。借鉴曲柄连杆形式,通过钩爪带动曲柄实现了间歇式前进,并能够适应不同楼梯护栏坡度以及不同长宽台阶的清洁要求,试验证明机器的运行状况良好。
(3)功能上的创新。一是实现了楼梯、护栏、扶手同步清洁和垃圾回收;二是实现了机器的自动行走和转向,无需人为干预;三是具有自主避障,避免出现影响行人通行或与墙壁碰撞等情况发生。
参考文献:
[1]褥铜,赵晨.智能清洁机器人国内外发展状况浅析[J].中国设备工程,2018(04):146-147.
[2]樊红卫,杜永刚,王鑫宇,等.箱体式楼梯清洁机器人的结构与控制系统设计[J].机械制造,2019,57(02):30-33.
[3]姜雪梅.基于双臂协调控制的楼梯清洁机器人[J].科技信息,2013(9):4.
[4]羊月生.一种楼梯扶手清洁机器人:中国,201810976304.X[P].2018-08-25.
[5]郑祥模.楼梯扶手清洁机器人:中国,201520321684.5[P].2015-05-17.
[6]宋金磊.一种楼梯扶手清洁机器人:中国,201620394513.X[P].2016-05-03.
