Type-2 Fuzzy Control for Driving State and Behavioral Decisions of Unmanned Vehicle
2020-02-29XuanmingZhaoHongMoKefuYanandLingxiLi
Xuanming Zhao, Hong Mo, Kefu Yan, and Lingxi Li,
Abstract—In this paper, interval type-2 fuzzy sets, fuzzy comprehensive evaluation and the fuzzy control rules are synthesized to realize the control of unmanned vehicle in driving state and behavioral decisions. Compared to the type-1 fuzzy set, type-2 fuzzy sets have more advantages in handling the model based on uncertainties, linguistic information because the membership functions are fuzzy sets. Different membership functions are established for each factor when the unmanned vehicle is driving at different speed intervals. In addition, a new evaluation method is developed to analyze unmanned vehicle’s driving state. Finally, a set of dynamic fuzzy rules are sorted out, which can be applied to the unmanned vehicle’s behavioral decision-making and provide a new idea to related research.
I. INTRODUCTION
WITH the increasing number of car ownership, the growth of the traffic accidents’ amount has become a successive problem. The phenomenon of traffic congestion is also becoming more and more serious, which makes the task of building an intelligent transportation system even more urgent [1]-[3]. It can be seen that the emergence of smart vehicle in intelligent transportation system can lead to the reduction of traffic accident and congestion.
The unmanned vehicle is a type of smart vehicle, which mainly relies on a computer-based smart system to achieve the goal of unmanned driving. The unmanned vehicle has many advantages of predictability of behavior, quick response and accuracy of perception over tradition methods, which increase the safety and reliability of driving. Because of these superiorities, the unmanned vehicle has attracted more and more attention, and has also become a hot topic in the academic research field [4], [5].
The working procedure of traditional manual vehicle can be divided into three parts: environmental awareness, behavioral decision-making and implementation, while the enhancement or replacement of these three steps has been selected in the automatic driving [6]. On the premise of ensuring safety, an efficient behavioral decision-making method are especially required, which can enable unmanned cars working with certain speed and efficiency to avoid traffic jams at the same time. In the process of decision-making, safe distance is an important index. Through certain decision-making method,the unmanned vehicle could maintain proper safe distance between the vehicles that are in front and after it, as so to keep safety range of running speed. Thus, the issues of safety and fluency are under consideration at the same time.
Factors affect the behavioral decision-making of vehicle,mainly including the clear distance between the vehicle in front and the vehicle itself, the driving speed of the vehicle itself, the relative speed with the vehicle in front and some unexpected issues like lanes-changing of other vehicles[7]-[11]. These factors have a certain degree of ambiguity in the actual driving [12]-[14]. Hence, fuzzy sets theory becomes the most effective approach to solve this problem.Type-2 fuzzy sets (T2 FSs) [15]-[18] can solve the problems of linguistic ambiguity and data noise much better than Type-1 fuzzy sets (T1 FSs). It also gives us wider discretionary to define the membership function [19]-[23], and shows its apparent superiority in dealing with the uncertainty of the system [24]-[26]. In this paper, interval T2 FSs, fuzzy comprehensive evaluation and the fuzzy control rule are synthesized to build a set of dynamic fuzzy rules which can be applied to the unmanned vehicle’s behavioral decision-making and a new idea is provided to related research.
This paper is structured in five sections: Section II introduces the relevant definitions; Section III presents a solution of comprehensive evaluation for driving state of unmanned vehicle based on interval T2 FSs; Section IV goes further in bringing the decision-making rules of unmanned vehicle based on fuzzy control rule and the last section of this paper gives a conclusion.
II. DEFINITIONS
A. Type-2 Fuzzy Sets
According to the definition of Wang and Mo [27], letis a set of all the nonempty close subsets ofI. A T2 FS ω onXis defined as

wherex(oru,z) is the primary (or secondary, third) variable,Lx⊆[0,1]is the primary membership grade, defined by the following multi-value mapping

i.e., for everyx2X, there issuch that

B. Fuzzy Comprehensive Evaluation
In real world, there are a lot of fuzzy concepts and fuzzy phenomena which are difficult to describe in conventional means. Fuzzy mathematics is trying to solve fuzzy things with mathematical tools.
Fuzzy comprehensive evaluation mainly includes:establishing the factor set of the evaluated object; setting the comment set of the evaluated object; setting the weight set for each factor; establishing the membership functions and corresponding base words of each factor; calculating the fuzzy comprehensive evaluation matrix; analyzing and evaluating results.
C. Fuzzy Logic
Suppose a control system with the input [28], [29]

which is composed ofmsensor readings, and its control output

The control output is composed ofncontrol components.Suppose that each sensor reading and control component is described by a set of language variables.
Forsi, we have

Foruj, we have

At the same time, assuming that the control behavior of the control system can be described by the following rules
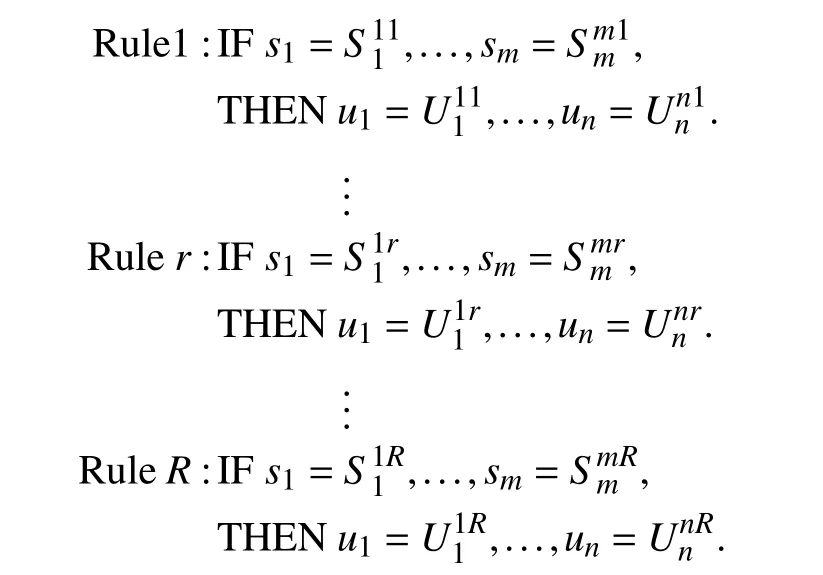
III. FUZZY COMPREHENSIVE EVALUATION OF UNMANNED VEHICLE’S DRIVING STATE
A. Fuzzy Comprehensive Evaluation on the Connected Interval T2 FSs
Set α be a connected T2 FS on the domain Ω, which is expressed as

The comprehensive evaluation also needs factor set,comment set, weight set and the corresponding membership functions. If the evaluated object is influenced byKfactors,the factor set containsKfactors and is recorded asM=fm1,m2,...,mKg. The comment set can include different types and numbers of comments according to the difference of the evaluated object. For example, if the comment set containsNcomments, it is recorded asC=fc1,c2,...,cNg. To make the evaluation more accurate, the corresponding weight set is usually set according to the extent of influence on the evaluated object based on factors of factor set, recorded asP=fp1,p2,...,pKg, among them, 0 ≤p1,p2,...,pK≤1 andp1+p2+···+pK=1. Finally, the membership function µ(M)and the corresponding base words of each factor are established on the domain. With the above conditions, the comprehensive evaluation on the connected interval T2 FSs can be expanded.
The steps are as follows:
Step 1:Establishing the factor set for the evaluated object:M=fm1,m2,...,mKg.
Step 2:Setting the comment set for the evaluated object:C=fc1,c2,...,cNg.
Step 3:Setting the weight set for each factor of evaluated object:P=fp1,p2,...,pKg.
Step 4:Obtaining the primary membership degree vectors

Step 5:Calculating fuzzy comprehensive evaluation vectors,among them,expressed as

and


wherej2 f1,2,...,Ng.
Step 6:Making judgment according to the principle of maximum membership degree.
B. Application of Fuzzy Comprehensive Evaluation in Unmanned Vehicle’s Driving State
When the unmanned vehicleuis running on the road, there are many factors that can affect its driving state as the surrounding environment constantly changes, among which the most common ones are: the distance betweenuand the front vehicle, pedestrians or obstacles; the driving speed ofuitself; the relative driving speed with the car in front; traffic lights signals and other traffic signs and so forth. Considering the validity of the parameters and the feasibility of the input data in this paper, the pedestrians or obstacles in front ofuare unified as a vehicle in front. Under the ideal driving environment, namely eliminating affecting factors like traffic lights and other traffic signs, the following three factors are selected as the main factors affecting the driving state of the unmanned caru: the driving speed ofuitself (hereinafter referred to as the driving speed); the relative driving speed betweenuand the vehicle in front, which means speed difference betweenuand the vehicle being followed.(hereinafter referred to as the relative speed); the distance betweenuand the vehicle being followed in front (hereinafter referred to as the interval distance).
There is no absolute standard to describe these factors because features like “big”, “small”, “fast” or “slow” are relative criteria, which varies when compared to different references. So according to the actual situation of road traffic,the driving speed ranges of unmanned vehicle arranged in the following three intervals: [0,20), [20,80) and [80,120), and the unit is km/h. Membership functions are established corresponding to each factor, which can make the evaluation results more accurate.
In the fuzzy comprehensive evaluation method, both input and output are expressed in the form of interval T2 FSs.Because there are many factors that would affect the driving state of unmanned vehicleuin various degree, in this paper,the driving state of unmanned vehicle is divided into three states: “safe”, “moderately safe” and “unsafe”.
Set Ωt, wheret=1,2,3, as the unmanned vehicle’s driving speed intervals, where Ω1, Ω2, Ω3respectively represent the driving speed intervals of the unmanned vehicle as [0,20),[20,80), [80,120). Membership functions of the “driving speed”, the “relative speed” and the “interval distance” are respectively given on interval Ωt, and the corresponding base words are also set up according to the above situation.
According to the factor “driving speed” (unit is km/h),respectively setting 3 groups of base words on Ω1, Ω2, Ω3:v11,v21,v31stand for slow,v12,v22,v32for medium andv13,v23,v33for fast. As shown in Figs. 1-3. Among them, “slow”represents “safe”, “medium” represents “moderately safe” and“fast” represents “unsafe”.

Fig. 1. Driving speed’s membership functions on Ω1.

Fig. 2. Driving speed’s membership functions on Ω2.

Fig. 3. Driving speed’s membership functions on Ω3.


According to the factor “relative speed” (unit is km/h),which refers to the driving speed of the research object minus the speed of the vehicle being followed, respectively setting 3 groups of base words on Ω1, Ω2, Ω3: γ11, γ21, γ31stand for small, γ12, γ22, γ32for medium and γ13, γ23, γ33for big. As shown in Figs. 4-6. Among them, “small” represents “safe”,“medium” represents “moderately safe” and “big” represents“unsafe”.
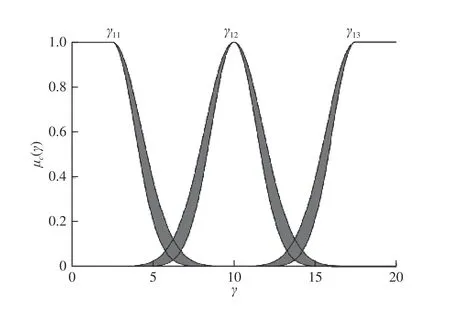
Fig. 4. Relative speed’s membership functions on Ω1.
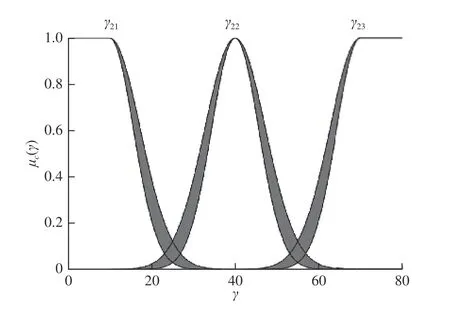
Fig. 5. Relative speed’s membership functions on Ω2.

Fig. 6. Relative speed’s membership functions on Ω3.


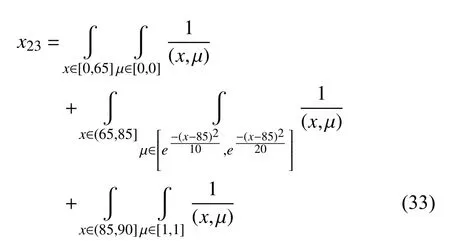
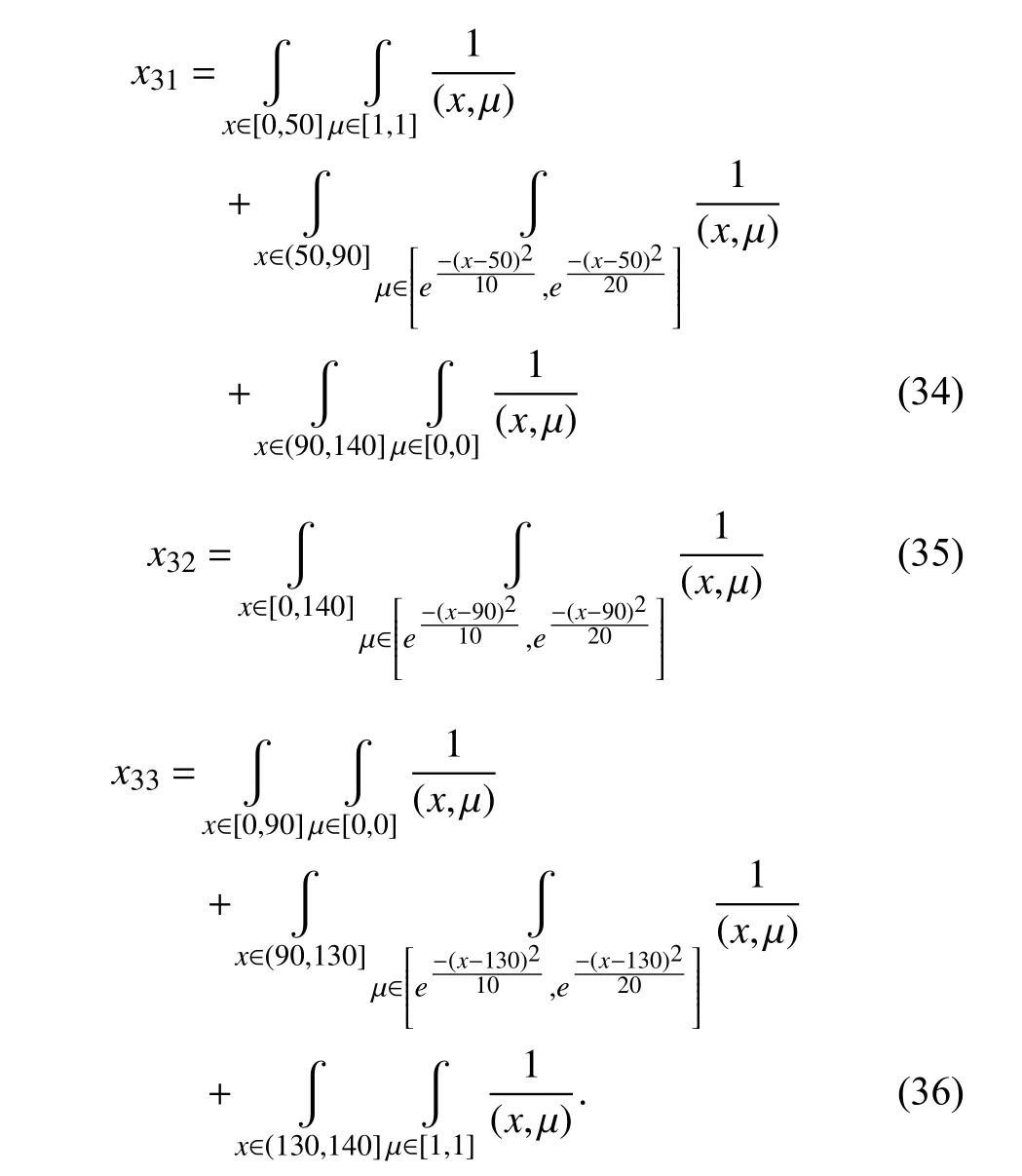
According to the factor “ interval distance” (unit is m),respectively setting 3 groups of base words on Ω1, Ω2, Ω3:x11,x21,x31stand for far,x12,x22,x32for medium andx13,x23,x33for close. As shown in Figs. 7-9 . Among them, “far”represents “safe”, “medium” represents “moderately safe” and“close” represents “unsafe”.


Fig. 7. Interval distance’s membership functions on Ω1.
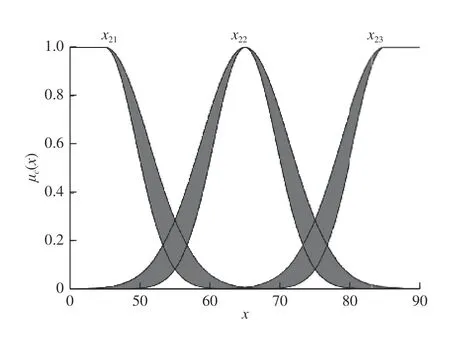
Fig. 8. Interval distance’s membership functions on Ω2.

Fig. 9. Interval distance’s membership functions on Ω3.
The steps of fuzzy comprehensive evaluation are as follows:
Step 1:Establishing the factor set of the evaluated object.
SettingM=fm1,m2,m3g as a factor set of the evaluated object, in whichm1represents “driving speed”;m2represents“relative speed”; andm3represents “interval distance”.
Step 2:Setting the comment set of the evaluated object.
SettingC=fc1,c2,c3g as a comment set of the evaluated object, in whichc1represents “safe”;c2represents“moderately safe”; andc3represents “unsafe”.
Step 3:Setting the weight set for each factor.
According to the actual situation and the relevant experience, a weight set of three factors can be set. In this paper, establishingP=f0.2,0.2,0.6g.
Step 4:Evaluating single factor.
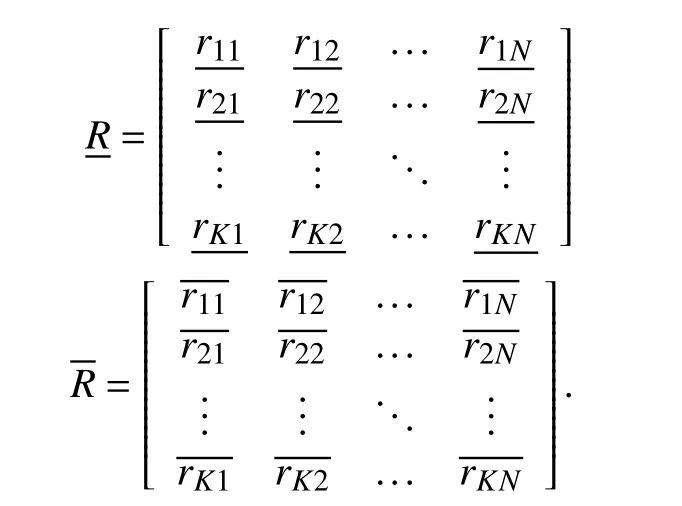
The upper and lower boundaries of membership degree matrices are a fuzzy relation fromMtoC. Evaluating each factor and obtaining the lower and upper boundaries membership degree vectors
Among the formulas, matching degrees between factor,includingm1,m2,m3and comment words, including “safe”,“moderately safe”, “unsafe” are respectively represented asandFinally, the type-2 fuzzy comprehensive evaluation matrices are obtained by using the weighted average fuzzy synthetic operator

Step 5:Making judgment according to the principle of maximum membership degree.
The weighted fuzzy synthetic value of the matching degree between all factors and basic words are taken as the primary membership degree, while all secondary membership degree is equal to 1, which can take form of interval T2 FSs

According to the principle of maximum membership degree,the fuzzy comprehensive evaluation can be used to appraise the current driving state of the unmanned vehicleuby using the weighted fuzzy synthetic value as the reference value.
IV. FUZZY CONTROL RULE OF UNMANNED VEHICLE’S BEHAVIOR DECISIONS
A. Fuzzy Control Rule
Fuzzy control rules are part of the knowledge base of fuzzy controllers based on linguistic variables. For example, in this paper, linguistic variables are defined as “safe”, “moderately safe”, “unsafe” , etc. A membership function is used to indicate the degree of the exact value on the basic domain belongs to the fuzzy subset. Therefore, in order to establish fuzzy control rule, it is necessary to merge the exact values on the basic domain into the fuzzy subsets according to the membership functions, so as to replace the exact values with the linguistic variables, which is the main content in the third section of this paper.
B. Application of Fuzzy Control Rules in Unmanned Vehicle’s Behavioral Decisions
The behavioral decisions of unmanned vehicle are made based on the assessment in the third section. When a car is driving on a road, its main actions include maintaining the speed and keeping it straight (U), decelerating (D),accelerating (A), changing lanes (C) or emergency braking(B). Driving state of the vehicle determines when and which action to be executed. All of these actions are achieved by pressing on the brake or throttle pedals, so we can transform these actions into 5 fuzzy subsets in this paper: negative big(NB) , negative small (NS) , zero (ZO) , positive small (PS) and positive big (PB). The output signal is linearly regulated in the range of [−3,3]. In order to meet the unmanned vehicle’s needs of safety and fluidity, safe distance shall be chosen as the main reference object in this paper.
According to the laws of mechanics, the vehicle will continue to move forward a certain distance from movement to complete stop. Hence, if the car is too close to the front car,it is easy to cause rear-end accidents. In order to ensure that the following car will not rear-end with the front car in any emergent situation, the rear car needs to always maintain a certain distance from the front car so as to have enough brake space. Safe distance refers to the distance that one vehicle needs to keep from its preceding vehicle for avoiding accidental collision with the front vehicle. There is no absolute number of the safe distance, as the case may be different. In general, the faster or heavier the car is, the longer the distance is required to guarantee safety. Safe distance is also affected by many other factors such as weather conditions, road condition, light intensity, driver’s response(unmanned vehicle depend on the response speed of equipment such as computers and sensors), braking equipment and so forth. In order to ensure that the unmanned vehicleumaintains a safe distance from the vehicle being followed in front, the fuzzy control rules are set respectively according to the following three road traffic scenarios.
The first scenario: there is no vehicle or obstacles in front when the unmanned vehicleuis driving. In this case,uwill drive according to the fuzzy control ruleR1:

The second scenario:uis driving steadily behind a vehicle as showed in the Fig. 10. In this case, the results of the fuzzy evaluation of the single factor described in the third section are taken as the inputs of the fuzzy control system and the pressure on the throttle/brake pedal are taken as the outputs c ontrol signal, the corresponding ruleR2is as follows:
The third scenario:uis driving behind a vehicle when another vehicle is about to change the lane as showed in Fig. 11. In this case,uwill drive according to the ruleR3:

V. CONCLUSIONS AND FUTURE WORKS
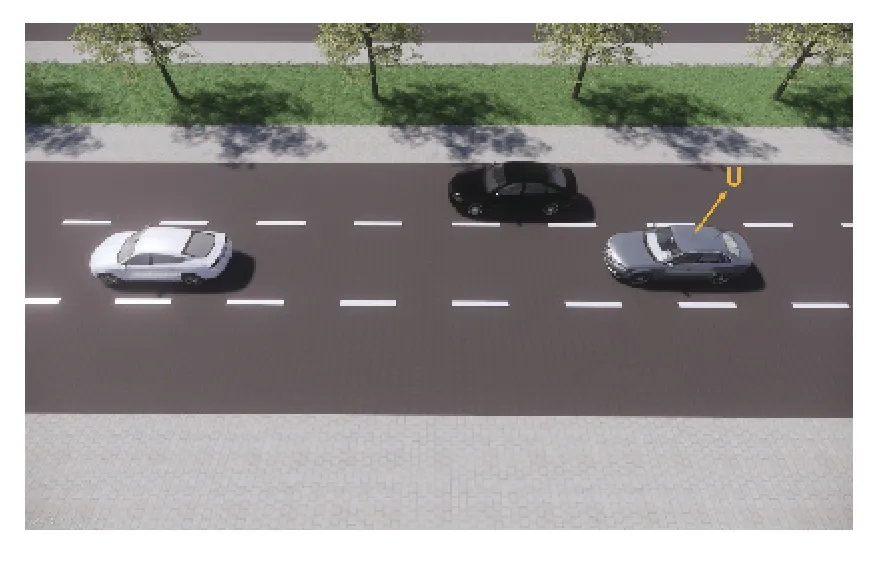
Fig. 10. Driving steadily.
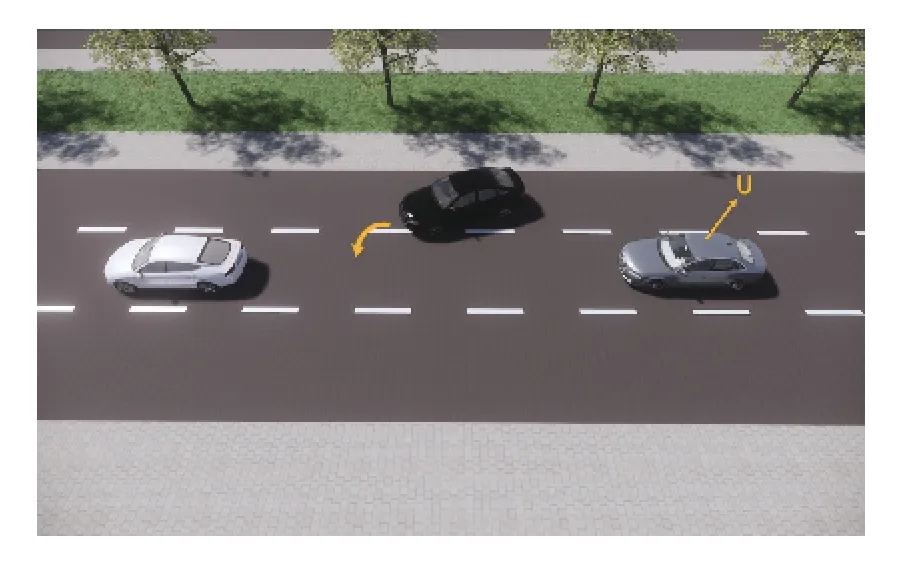
Fig. 11. Changing the lane.
A fuzzy comprehensive evaluation method is given for evaluating the driving state of the unmanned vehicle, and a set of dynamic fuzzy rules is formulated to apply to the behavior decision-making of unmanned vehicle. According to the characteristics of the research object, different membership functions are established for each factor in the factor set when the unmanned vehicle is driving in three different speed intervals. This not only makes the evaluation results more accurate, but also brings great convenience to the formulation and practical application of the fuzzy control rules. The fuzzy rules formulated in this paper are mainly based on fuzzy sets theory, which is intended to provide a new idea and method for the behavior decision-making problem of unmanned vehicle.
In this paper, three speed intervals are distinguished in type-2 fuzzy set modeling of the factor sets, and fuzzy subsets used in describing each factor is inadequate, which may lead to the evaluation results not conforming to the normal judgment of human drivers in some environments. Due to the requirement of driving environment and the fact of low number of base words in the membership functions, fuzzy rules in this paper may run into some problems in practical application. In the future work, we can adjust the number of speed intervals and the number of fuzzy subsets to make the evaluation results more accurate. What is more, adjusting the number of base words and improving the content of the fuzzy rules can generate an improved performance in the method. Because this paper mainly introduces the theory of fuzzy sets into the decision-making of unmanned driving behavior to prove its validity and provides a new way of thinking, the decisionmaking rules set up in this paper are relatively simple, and can only be aimed at the decision-making rules that do not consider extreme weather conditions, and the vehicle is not exposed to traffic lights and other ideal traffic driving environment. Based on the above reasons, we can consider all kinds of road traffic conditions and design a more perfect rule base for the behavior decision-making of unmanned vehicle,which is also worth studying in the future.
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- Networked Control Systems:A Survey of Trends and Techniques
- Big Data Analytics in Telecommunications: Literature Review and Architecture Recommendations
- A Stable Analytical Solution Method for Car-Like Robot Trajectory Tracking and Optimization
- A New Robust Adaptive Neural Network Backstepping Control for Single Machine Infinite Power System With TCSC
- Algorithms to Compute the Largest Invariant Set Contained in an Algebraic Set for Continuous-Time and Discrete-Time Nonlinear Systems
- Asynchronous Observer Design for Switched Linear Systems: A Tube-Based Approach