基于绝对式的压力电测系统准静态校准方法分析
2020-02-26孔德仁陈金刚褚俊英
陈 静,孔德仁,郭 彬,陈金刚,褚俊英,项 璟
(1.北京交通大学海滨学院电子与电气工程学院,河北黄骅 061100;2.南京理工大学机械工程学院,江苏南京 210094;3.黄骅市住房和城乡建设局,河北黄骅 061100)
0 引言
采用电测法测量压力时,国内外广泛采用的是压电式测量系统,但由于其输出阻抗比较高,与之匹配的信号调理器的阻抗却不高,从而导致整个测量系统的低频或零频特性比较差,因此对电测系统进行标定以获取系统的工作特性参数是必不可少的[1]。按照压力量值传递的规程,一般采用静态标定,但是由于系统的低频或零频特性不够理想等原因采用静态标定时不可避免会产生传感器的电荷泄漏,导致系统响应的漂移等问题,且静态标定加载时间过长会给昂贵的传感器带来损耗[2]。此外,若采用适用于高频段的动态校准又无法满足低频或零频的检测[3]。为弥补以上两类校准的缺憾,准静态校准应运而生。
压力准静态校准[4]指的是采用峰值及脉宽均已知且类似于被测压力的半正弦型压力脉冲来校准压力电测系统。若想保证校准结果与静态校准结果相当,则该半正弦型的压力脉冲的宽度需足够宽,从而使得其有效带宽完全处于被校准系统幅频特性的平直段内,也就是说对于固有频率较高、可用频带较宽的压电式压力传感器的整个工作频带来说,低频段相当于静态。采用准静态校准的方法来获取压力电测系统的灵敏度等工作参数是最佳的选择,该方法可减小系统的动态误差,大幅度提高测量精度;除此之外,准静态校准加载在每个校准压力点的时间很短,仅为ms级,从而可提高压力传感器的使用寿命。
目前常用的准静态校准方法可分为比对式和绝对式两种[5]。前者采用多路价格高昂的高精度压电式压力传感系统构成标准压力监测系统,虽然有着较高的校准精度,但试验成本过高;后者常采用的方法是根据重锤下落高度和油缸内压力峰值之间的数学关系模型来确定标定时的压力峰值,其在校准过程中产生的误差受多种因素影响,如标准压力传感器的精度、落锤液压标定装置的复现性、重锤落高的定位精度以及量值传递中间环节引入的误差等[6],校准精度较低。而力监测压力的绝对式准静态校准方法采用的是工作原理相同但价格和性能均优于压力传感器的力传感器,因此该方法成本较低且校准精度较高,有必要对其进行研究。
本文简要介绍了绝对式准静态校准的装置,并阐述了校准原理,通过建立力-压力动力学理论模型证明了力监测压力的可行性。
1 准静态校准装置
本文采用的准静态校准装置主要由落锤液压动标装置、空气压缩机、控制柜及其他相关系统组成[7],其结构如图1所示,可产生峰值在10~1 000 MPa,脉宽在3~12 ms范围内可调的压力脉冲信号。其中造压油缸是准静态校准装置的核心部件,油缸本体上端可旋入精密活塞组件,精密活塞组件由活塞杆和活塞缸组成,本系统共配备了2种面积的精密活塞组件(直径分别为11.3 mm、15.975 mm),可根据所需的压力峰值及脉宽来选用,油缸本体侧面开有测压传感器安装孔,油缸本体中注有传压介质,传压介质采用纯蓖麻油,安装油缸时多余的蓖麻油可从溢流阀排出;重锤采用组合式结构,由基本锤架和6片8 kg的配重片构成,质量在4~52 kg范围内可调,其下落高度在5~1 500 mm范围内可调。

图1 落锤液压标定装置示意图
落锤液压动标装置作为压力信号发生器可产生半正弦信号,其工作原理如图2所示,重锤沿竖直导向系统自由下落,重锤的重力势能转化为其动能,重锤下落至打击造压油缸上方的活塞,压缩造压油缸内的传压介质,使传压介质在造压油缸内产生压力,重锤继续下落使造压油缸内的压力增大,当下落到极限时,其动能全部转化为造压油缸内传压介质体积变化而形成的液压势能,此时造压油缸内的压力达到最大值。其后由于传压介质的弹性恢复作用,将重锤与活塞退回,液压势能重新转化为重锤的动能,重锤作反向运动直到与活塞脱离。重锤与活塞的一次撞击过程即可产生一个压力脉冲,该脉冲呈半正弦曲线形。

图2 落锤液压动标装置工作原理图
将造压油缸、锤体和活塞都看成是理想刚体,其几何尺寸不随压力变化。取重锤为研究对象,可得以下关系:
运动方程:
(1)
协调方程:
ΔV=-S·x1
(2)
物理方程:
(3)
式中:x1为活塞的位移;p为造压油缸中蓖麻油的压力;M′为重锤及活塞的质量,M′=M+m;S为活塞的有效面积;V0为造压油缸的初始容积;ΔV为造压油缸容积的变化量。
式中:β为液压油弹性模量压力系数;E0为液压油的初始体积弹性模量。
式(1)可进一步写为
(4)
初始条件为
(5)
终止条件为
x(t)<0
(6)

(7)
在工程中采用一种近似方法求解式(7),得到落锤液压动标装置的拟线性模型[8]:
压力峰值为
(8)
压力脉宽为
(9)
由式(8)、式(9)可知,半正弦压力源的峰值和脉宽受到重锤的下落高度h、重锤质量M、造压油缸初始容积V0、活塞杆有效面积S等诸多因素的影响,因此通过调节各影响因素可得到不同脉宽和峰值的半正弦压力信号。
2 准静态校准的方法
本文采用的是力监测压力的绝对式准静态校准方法,具体实现方法为在重锤撞击精密活塞组件过程中,用安装于造压油缸的标准压力传感器测量造压油缸内的压力,用安装于锤体与锤头之间的测力传感器测量活塞杆对重锤系统的反作用力,用高精度数据采集系统记录力值测量系统和标准压力测量系统的信号变化,建立峰值压力与峰值力的关系模型;然后拆除标准压力传感器,根据得到的力和压力关系模型,通过力值测量系统测得的力便可反映造压油缸内的压力变化,可将该压力信号作为被校传感器的输入激励信号;利用落锤液压标定装置产生不同峰值压力、不同脉宽的半正弦力信号和压力信号,对被校压力传感器进行校准,根据系统响应获取被校压力电测系统的工作特性参数。图3为被校压力传感器及标准测力传感器安装图。
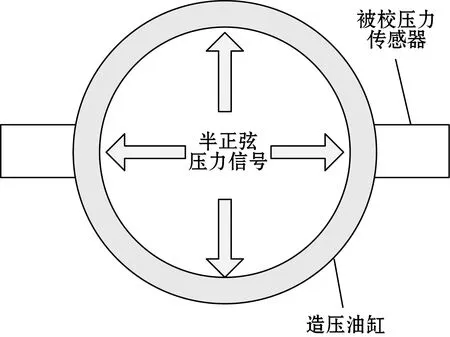
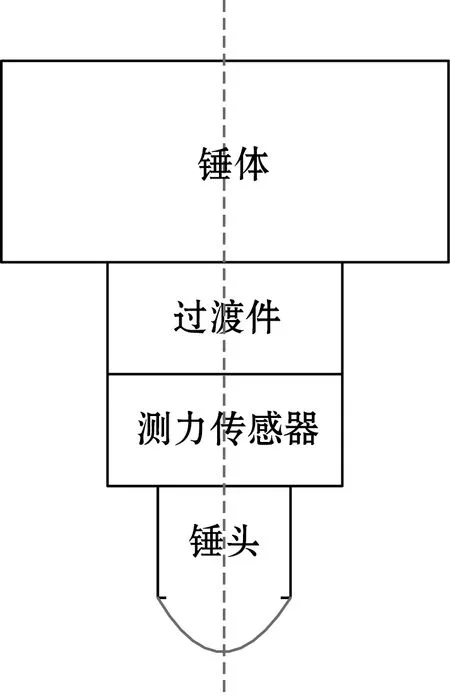
图3 被校压力传感器及标准测力传感器安装图
3 力-压力动力学理论模型研究
造压油缸内产生的压力与落锤打击造压油缸精密活塞组件的受力状态及运动特性密切相关,为了验证力和压力之间的相关性,有必要探讨力和压力之间的理论模型。
当锤体沿导向杆自由落下时,锤头打击活塞,在锤头与活塞接触期间,假设:
(1)油缸、活塞和锤体均为刚体,其几何尺寸不随压力变化而变化;
(2)锤头与活塞接触期间作刚性连接,无相对运动;
(3)假设锤头打击活塞时无偏心。
基于上述假设,当锤头与活塞接触时,可将其等效为图4所示力学模型。将油缸内液压油视为弹簧,其弹性刚度和阻尼系数分别为k1,c1,传感器的等效刚度和阻尼系数分别为k2、c2,m1=M+m为锤头及活塞的质量,m2为锤体的质量,x1、x2分别为活塞和重锤的运动位移。为考证在此情形下力信号输出与压力信号之间的相对关系,忽略活塞与油缸之间的摩擦阻力,根据达朗贝尔原理,建立系统的运动微分方程,则

图4 力-压力动力学理论模型
(10)
(11)
将式(11)化简为
(12)
引入微分算子,则式(12)可化为
(13)
(14)
力传感器输出应为Kf(x2-x1),其中Kf为常数,是传感器静标灵敏度系数,x2-x1的值可由式(14)计算得到,即与x1有关。油缸内压力输出可用x1表示,但由于式(10)中k1不是常数,它随着压力的变化而变化,根据上述协调方程(2)和物理方程(3)亦可知压力与x1并不是完全的线性关系。
造压油缸中蓖麻油的压力为

(15)
式中E0、S、V0、β为定值,则造压油缸内的压力p只与x1有关。
由此可见,力与压力之间的关系可由式(14)和式(15)进行分析计算,用力监测压力的方法是可行的。
4 结论
本文针对压电式压力电测系统低频或零频特性差的缺点,介绍了绝对式准静态校准,该校准方法解决了静态标定中传感器电荷泄漏等问题,同时其优于只适用于高频段的动态校准,可实现低频或零频特性的检测。通过建立基于力监测压力的动力学理论模型,最终证明了该方法的可行性。
