一种内河船舶吃水检测系统设计
2020-02-26汤伟毕
韩 伟,汤伟毕,李 然,游 强
(长江三峡通航管理局,湖北 宜昌 443002)
近年来,随着内河航运的迅猛发展,通航船舶朝着大型化、标准化方向发展,载质量和吃水不断增大,船舶数量也不断增多,坐落在黄金水道上的通航建筑物如三峡船闸、葛洲坝船闸、三峡升船机运行都面临巨大压力,许多问题亟待解决,其中最为突出的便是船舶超吃水问题。在利益的驱使下,一些船主置航运安全于不顾,谎报船舶吃水,严重危及了船舶和通航建筑物的安全[1]。
目前内河及港口常见的船舶吃水检测手段有人工测量法、激光光幕法、多波束超声波测量法等。人工测量法由于劳动强度大、效率低、水尺的精确性直接影响测量的结果,导致使用受限;激光光幕法对于水质、环境要求较高,且激光在水中传播距离短,汛期长江浑浊的水质大幅影响了测量的精度;多波束超声波测量法的成本高、安装复杂,且测量精度和测量范围不能满足需求。目前市场上的船舶吃水超限检测系统均不能达到测量精度高、环境适应性好、安装方便等要求[2-3]。
为保证内河通航建筑物及船舶的安全,须对船舶吃水进行实时动态检测,本文设计了一种内河船舶吃水检测系统,能够满足船舶过闸或升船机的吃水检测需求。
1 检测原理
根据惠更斯-菲涅耳原理,声波在水中传播遇到障碍物时会发生衍射,即部分声波会绕至障碍物后继续传播,基于侧扫单波束阵列的吃水检测系统便是利用声波的衍射测量船舶吃水,检测原理如图1[4]所示。在航道的两边分别安装传感器阵列,当无船舶经过时,接收到的超声波信号完整;当有船舶经过时,超声波信号由于船体的遮挡发生衍射,根据接收到的超声波的延迟时间和波形强度判断传感器的遮挡程度,并结合当时的水深确定船舶的实际吃水[5]。

图1 检测原理
2 检测系统组成
侧扫式吃水检测系统结构如图2所示。

图2 侧扫式吃水检测系统结构
1)超声波发射阵列由12只超声波传感器组成,安装于调节支架上,传感器之间的间距为9 cm,根据系统设定值发出特定频率和持续时间的小角度超声波脉冲,为满足系统精度要求和实时性,系统所采用的传感器中心频率500 kHz,波束角2°~3°,响应时间小于1μs,超声波接收阵列与发射阵列一一对应,用于接收未被障碍物阻挡传播来的超声波,响应时间小于1 μs,在系统里对发射端、接收端阵列中的传感器进行编号,编号相同的发射端传感器和接收端传感器处于同一水平线上,从上至下,采取依次发射超声波信号、延迟接收的方式,避免了传感器之间的串扰。
2)水位检测单元由2只水位计构成,用于测量装置离水面的距离,通过RS485将水深数据传输至下位机控制箱,换算成船舶吃水基准线。
3)下位机控制箱主要包括发射端控制箱和接收端控制箱,由调制器、数据采集器和通讯装置组成,发射端控制箱用于控制超声波依次发射信号,接收端控制箱用于接收发射端传感器的输出信号和水位检测单元数据,在剔除异常数据和对传感器的输出信号进行特征值提取后,将处理好的数据整合成一帧,通过光纤传输给上位机数据处理单元。
4)调节支架结构如图3所示。主要用于安装超声波传感器单元,可调节传感器的安装角度和位置高度适应安装、测试环境的变化。

图3 调节支架
5)上位机为一台高性能的数据处理服务器,安装有基于微软基础类库(MFC)的吃水检测软件,对下位机传输的数据进行提取后进行实时处理,得出船舶的吃水深度,并绘制船舶的吃水拟合线,侧扫信息显示界面如图4所示,可以设置传感器系数、警戒水位,显示当前水深、船舶吃水、安全距离以及吃水二维坐标图。

图4 侧扫信息显示界面
3 系统在葛洲坝2#船闸的测试
吃水检测系统在葛洲坝2#船闸进行了安装、测试,葛洲坝2#船闸闸室长266 m、宽32.8 m,检测装置发射、接收阵列支架在上游左、右人字门内对称布置,安装于第3层第2格,如图5 所示,其中支架尺寸为290 mm×210 mm×2 200 mm(长×宽×高)、门格尺寸为3 600 mm×2 700 mm×2 300 mm(长×宽×高),装置可检测进、出上闸首航槽内船舶吃水[6]。
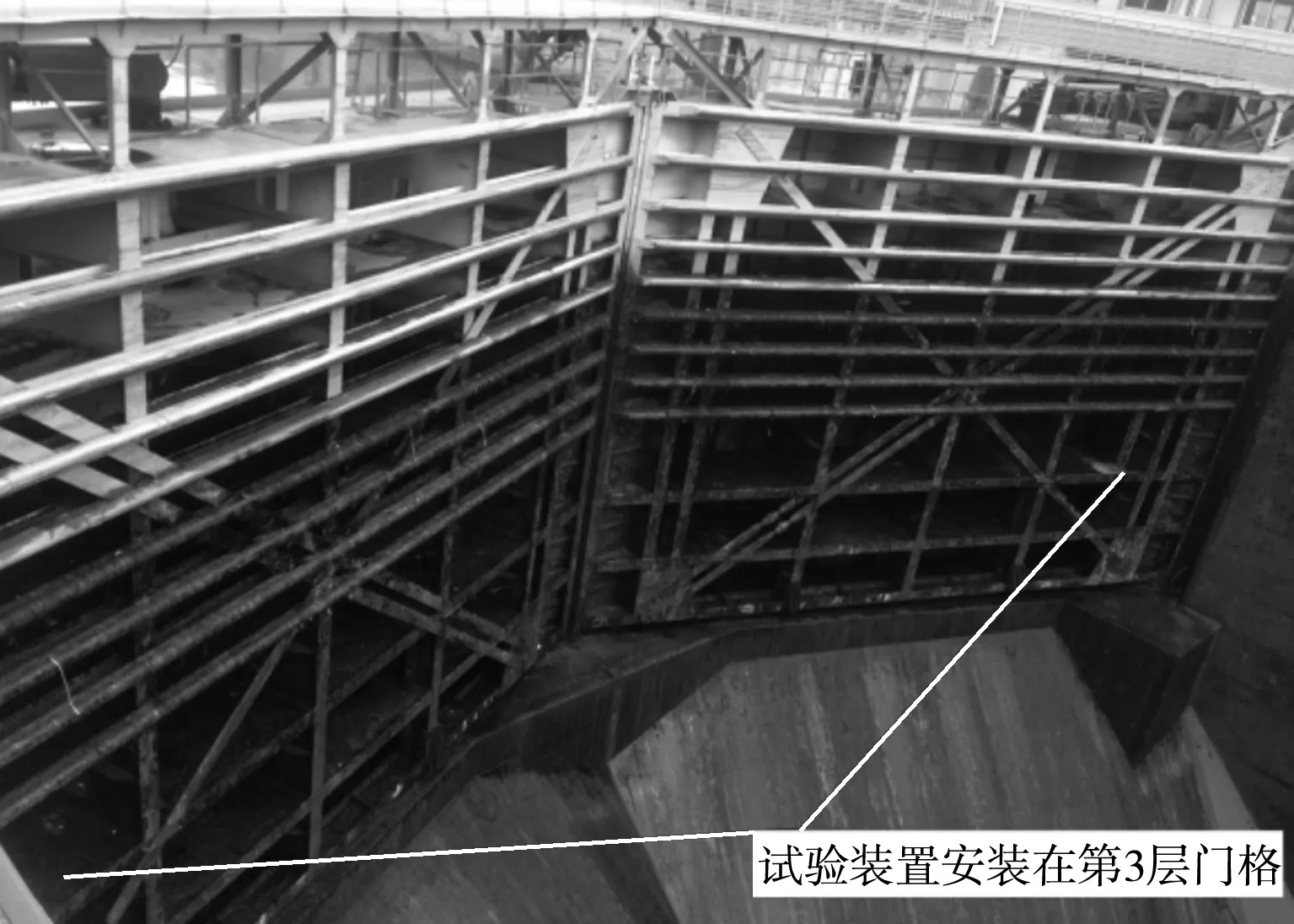
图5 传感器支架安装位置
3.1 安装原理
支架与人字门底板通过点焊方式固定,稳定性好、可靠度高。根据安装位置,可通过调节样机安装支架实现3.3~5.0 m范围内的船舶吃水检测,为了保证检测装置(图6)发射端与接收端传感器安装位置偏角在1°以内,调节发射端传感器位置以实现传感器安装架在y轴方向做旋转运动和平行移动,通过旋转调节板角度(调节角度范围±3°),从而实现安装架在y方向上的角度变化,并用螺栓锁紧,通过调整传感器安装架安装孔与调节板安装孔之间的安装间距即可实现传感器在y轴方向上下平移。

图6 传感器支架
3.2 基准定位
当葛洲坝2#闸上游人字门处于开终状态时,在闸面上选择一个参考点,通过垂准仪找到人字门纵向方向的安装位置并做好标记,同时利用垂准仪在人字门第3层的底部和顶部进行定位,从而找到相应的位置焊接支架的支撑件,支架的支撑件由上支撑件和下支撑件组成,其中上支撑件焊接在第3层顶部板上,下支撑件焊接在第3层底部板上,上、下支撑件上均有两个U形孔。
3.3 支架安装
当人字门处于关闭状态时,使用起重设备将支架吊至相应高度,然后通过螺栓将支架固定在上下支撑件上的U形孔中,经过多次的人字门关闭和开启测试并通过调整螺栓在U形孔中的位置,完成两组支架装置的准确定位与安装。
3.4 测试
本项目通过三峡海事部门在锚地中选取10艘信誉良好、水尺刻度清晰的待闸船舶,并提前对船舶吃水及水尺线精度进行校核,确保船舶吃水结果的准确性。在船舶通过吃水检测装置时,分别记录了船舶船首、船中、船尾3处位置的水尺数值,根据水尺数值得出船舶实际吃水值,通过与检测装置的测量值进行对比明确了系统误差,实测数据见表1。
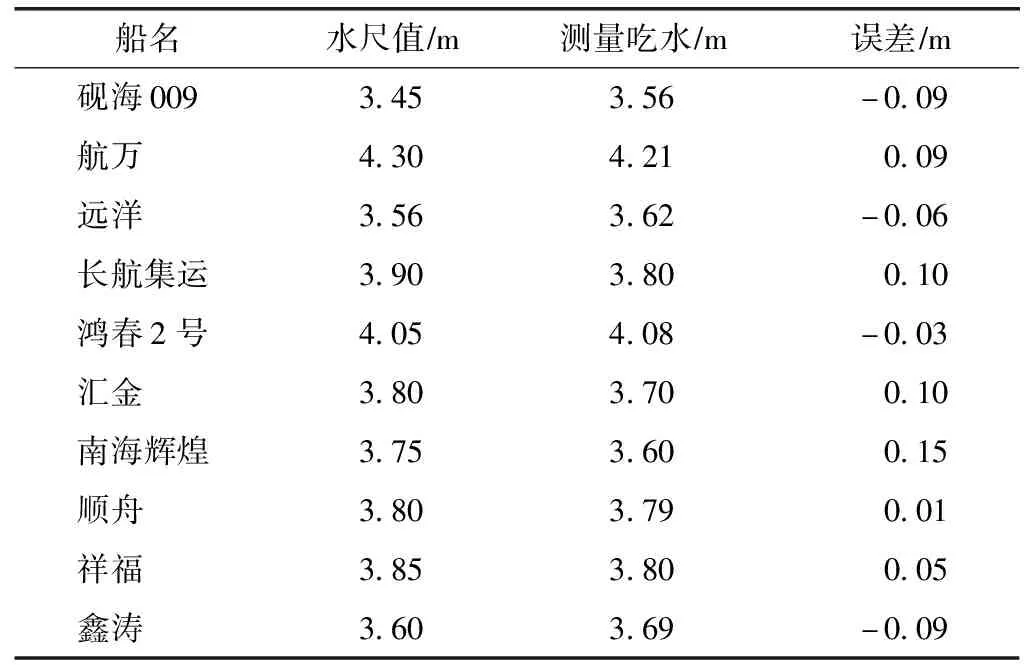
表1 实测数据
利用式(1)进行计算,侧扫式吃水检测装置测量标准差为0.086 m。
(1)

4 总结
1)本文设计了一种基于侧扫单波束阵列的吃水检测系统,主要由超声波发射阵列、超声波接收阵列、水位测量单元、下位机发射端控制箱、下位机接收端控制箱、上位机、调节支架组成。
2)侧扫式吃水检测系统在葛洲坝2#船闸上游人字门进行安装及测试,表明该系统易于安装、维修方便,测量标准差小于0.086 m。
