液体火箭发动机健康监控技术研究现状
2020-02-26吴建军程玉强
吴建军,程玉强,崔 星
(国防科技大学空天科学学院,湖南长沙 410073)
0 引言
液体火箭发动机健康监控技术是伴随着航天领域需求的推动而逐步发展起来的,其起源于1967年美国执行阿波罗登月计划时出现的一系列严重设备故障。之后,美国海军研究室在国家航空航天局(National Aeronautics and Space Administration,NASA)的倡导下,进行了一系列的研究开发工作。
健康监控技术的研究主要包括故障检测与诊断理论方法的研究和健康监控系统的研制等方面。
1 液体火箭发动机故障检测与诊断理论方法
液体火箭发动机健康监控技术的核心和基础是故障检测与诊断的相关理论方法。根据故障检测与诊断算法所使用的信息类型,以下基于模型驱动的方法、基于数据驱动的方法和基于人工智能的方法等3 种类型分别进行相关研究评述。
1.1 基于模型驱动的方法
基于模型驱动的故障检测与诊断方法主要包括基于解析模型的方法和基于定性模型的方法。
1.1.1 基于解析模型的方法
基于解析模型的故障检测与诊断方法其基本原理是:首先,根据系统运行的内在规律,以解析方程的形式表示系统的输入、状态和输出之间的关系,从而建立系统的数学模型;其次,根据数学模型的输出与系统的实际测量信息进行比较生成残差,并对所生成的残差信息进行分析和处理,从而实现故障的检测与诊断。根据其所建立模型的不同,基于解析模型的方法可分为基于静态模型的方法和基于动态模型的方法。
基于动态模型的方法主要包括状态估计、参数估计等方法。状态估计方法利用状态观测器(或卡尔曼滤波器)估计发动机的状态,再基于估计量与实际测量信号所生成的残差进行故障检测。参数估计是指利用系统输入和输出的可测量值对系统参数进行辨识,并根据参数的统计特性来检测故障。
基于数学模型的故障检测与诊断方法在理论上是完备的,但其诊断结果的准确性直接依赖于所建立的数学模型与实际系统的相符程度。对于系统结构和工作过程简单、输入输出关系明确的小型系统而言,基于数学模型的故障检测与诊断方法是一种不错的选择。然而,对于发动机尤其是新一代大推力液体火箭发动机而言,由于其是一个机械—流动—燃烧等过程强耦合的复杂非线性系统,不仅关键部件多,相互紧密耦合,而且大多处于高温、高压、强振动的极致工作环境中,并需经历多次起动、转工况、主级运行与关机的大范围变工况工作过程。因此,建立合理精确的数学模型本身就是一个困难的问题,同时,所建立的数学模型是否适用于基于模型的故障检测与诊断是另外一个问题。例如,对于状态估计方法,由于发动机系统结构工况复杂,故障模式较多,要实现对发动机故障的准确诊断,就需要对每种故障模式和不同工况,设计相应的高阶状态观测器,这样就会使得整个诊断系统很复杂,用于实时在线检测与诊断显然是很难满足要求的。对于参数估计方法而言,发动机有限的输入输出测量参数,使得很难准确估计出众多与故障相关的结构、性能参数,有时甚至使得求解无法进行。因此,在液体发动机故障检测与诊断研究中,基于模型的方法需要与其他方法结合采用。
1.1.2 基于定性模型的方法
基于定性模型的方法其基本原理是:首先根据系统组成元件之间的连接(或参数间的依赖关系)建立诊断系统的结构、行为或功能上的定性模型;然后,通过将系统定性模型预期行为与系统实际行为进行比较,获取异常征兆;最后,利用定性推理技术,对导致异常征兆出现的故障源进行搜索求解。
基于定性模型的方法具有计算简单、速度快等特点,但其诊断求解过程中通常会产生除真实解以外的大量虚假行为,即故障诊断的准确性不高。为此,近年来很多学者针对集成定性和定量知识的故障诊断方法进行了大量研究。而事实上,在许多情况下,系统的确有可用的定量知识。例如,2013年,晏政[1]建立了航天器推进系统定性定量集成的故障诊断方法,包括建立了附带时间信息以及包含组件节点间的影响关系的SDG 模型,发展了相应的故障诊断策略,并将其应用于神舟推进系统故障诊断中。结果表明,该方法能有效提高故障诊断的分辨率,能确定唯一故障源。
1.2 基于数据驱动的方法
基于数据驱动的方法主要是根据系统的输出与故障之间的联系,对发动机的测量输出信号进行分析处理,判断故障是否存在及故障发生的位置。基于数据驱动的方法主要包括统计分析、主成分分析、独立分量分析、小波分析、羽流光谱分析、最小邻域方法、支持向量机方法和聚类方法等。
统计分析方法是根据大量的数据样本进行统计分析,以得出发动机或其部件状态统计意义上的规律,从而确定出参数的阈值,实现故障检测的目的。一般而言,统计分析方法包括固定阈值和自适应阈值两种。
固定阈值方法是工程上最简便、最快捷,也是最常用的一种基于发动机输出信号的故障检测方法。但是,对于不同台次、不同工况的发动机,以及启动、变工况和关机等不同工作过程,该方法都需要对检测参数的阈值进行人为事先设定,而难以根据发动机的实际工作情况进行自动调整。因此,为了减小误报警率,固定阈值方法的阈值一般都设置得较宽,但这同时也会增加故障的漏报警率。针对上述问题,有学者提出了自适应阈值算法。该算法的优势在于采用递推方法自适应地计算参数的均值、方差和阈值,从而提高了算法的故障检测能力。此外,为了避免对每个参数都计算阈值,并考虑参数之间的关系,还提出了自适应相关安全带算法。
相对于基于高维非线性模型进行求解的数学模型方法而言,基于数据驱动的故障检测与诊断方法计算量较小,实时性较好,因而在发动机的实时故障检测中得到了一定的应用。然而,该方法对测量数据的质量要求很高。一般而言,当发动机正样本(故障状态数据)和负样本(正常状态数据)达到3∶7 左右的比例时[2],基于数据驱动的故障检测与诊断方法能够较好地利用数据所隐含的信息、分布规律,其结果也具有较高的准确性和置信度。然而,由于发动机结构和工作过程的复杂性,不仅发动机类型不同,其结构和工况不同,故障表现形式各异,而且即使是同一类型的发动机,其故障模式也会由于输入条件的微小变化发生漂移或完全不同,由此测量得到的发动机试车数据基本都是正负样本比例严重失衡的病态分布。因此,在不可能获得发动机全部故障模式特征、缺乏充分数据样本的情况下,基于数据驱动的发动机故障检测与诊断方法,目前更多地集中在发动机稳态工作过程的故障检测和报警方面,很难实现对液体火箭发动机故障的准确隔离和定位。
1.3 基于人工智能的方法
基于人工智能的方法主要包括专家系统、神经网络和模糊理论等方法。
1.3.1 专家系统
基于专家系统的液体火箭发动机故障诊断方法是通过在故障检测与诊断专家系统的知识库中,存储故障征兆、故障模式和故障原因等知识,然后推理机在一定的推理机制下,运用知识进行诊断推理。该方法不依赖于发动机的数学模型,可以有效地利用专家的经验和发动机知识,通过推理过程完成发动机的故障检测和诊断,具有对故障的解释能力。
目前已研究开发出的发动机故障检测与诊断专家系统主要有:AEROJET 公司研制的基于规则的Titan 健康评估专家系统,用于Titan 第一级发动机验收试验和例行的数据分析,并以图形解释数据[3];LeRC 开发的试车后数据自动评估系统,用于为航天飞机主发动机(Space Shuttle Main Engine,SSME)地面试车、飞行试验监测数据的事后分析与评估提供一个完整通用的自动化系统,以协助检测数据评估专家确认试验目标是否达到、试验过程中是否存在异常,以及试验是否失败等[4];MSFC 联合Alabama 大学开发的发动机数据解释系统,用于对SSME 试车数据的事后分析[5],该系统主要是通过建立发动机及其部件的定性约束模型,以及将部件的状态定性化为正、负偏离于正常状态,然后对所观察到的故障状态用定性或基于模型的推理方法搜索合理的解释。
对于发动机故障诊断专家系统,理想的知识库和知识表达形式,应能完善和精确地表达发动机的诊断知识。目前基于专家系统的液体火箭发动机故障诊断方法主要存在以下不足:诊断知识获取困难,系统自学习能力不强,故障检测与诊断的实时性差、运行效率低,一般只能在发动机工作前准备或关机后分析的情况下离线使用等。
1.3.2 神经网络
神经网络具有自组织、自学习能力,能克服传统的以启发式规则为基础的专家系统,不能正确处理新型故障信息或现象的问题,因而在故障检测与诊断领域具有较好的应用前景。神经网络用于液体火箭发动机故障检测与诊断的主要方式有:
1)基于无教师学习的神经网络采用聚类方式进行发动机故障检测。由于神经网络具有自组织、自学习能力,使得神经网络故障检测方法无需液体火箭发动机系统的结构知识,只需传感器测量信号,便可自行抽取发动机故障行为特征。
2)基于发动机测量信号与神经网络估计信号之间比较,得到残差信号,实现对液体火箭发动机的故障检测。
3)利用神经网络的自学习能力,将已有的发动机故障样本输入神经网络进行学习,调整神经网络的权值,建立故障模式与特征参数向量的对应关系,然后对新的输入样本进行相似性度量,得到发动机故障分离结果。
目前,应用于液体火箭发动机故障检测与诊断的神经网络方法,主要有前向多层感知机神经网络、自组织神经网络、模糊神经网络、动态神经网络和混合神经网络等。
2000年,王建波[6]研究了主成分分析与Koho⁃nen 网络相结合的液体火箭发动机泄漏故障检测方法。2001年,杨尔辅等[7]建立了火箭发动机非线性动态径向基函数神经网络模型。2003年,张炜等[8]研究了涡轮泵并行BP 网络的故障诊断方法。2005年,王志武[9]应用BP 网络检测了液体火箭发动机的泄漏故障;邱忠[10]提取了某型液体火箭发动机涡轮泵的频段能量比特征,并利用自组织映射网络对涡轮泵的健康状态进行了判别。2008年,谢廷峰等[11]研究了BP 神经网络以及径向基函数(RBF)神经网络在某型液氢液氧火箭发动机启动和稳态工作过程故障检测中的应用,并使用大量的历史试车数据以及地面热试车考核与验证。2012年,黄强[12]将云理论和神经网络相结合,实现了液体火箭发动机工作全过程基于云-神经网络的实时故障检测方法,应用于高压补燃循环发动机稳态工作过程多种工况的故障检测,得到了良好的结果。2017年,聂侥[13]通过基于权值更新的过程神经网络算法和自适应系数更新,解决增量问题,提高对液体火箭发动机故障预测的及时性和有效性。
神经网络方法由于具有较强的容错能力,在某些信息丢失的情况下(如部分传感器失效)仍可做出正确的诊断。这对于提高液体火箭发动机故障检测与诊断的可靠性而言,显得尤为重要。但是,该方法应用于故障诊断时,过分依赖于从历史数据中提取的典型模式或经验知识。
1.3.3 模糊理论
液体火箭发动机故障诊断过程中,存在着各种不确定性,主要包括各种干扰和噪声、测量误差、数学模型以及诊断知识描述的不精确等。而基于模糊理论的方法由于在处理系统复杂性及不确定性方面的优势,因而受到极大的关注。模糊理论在故障诊断方面也得到了较为广泛的应用研究。基于模糊理论的故障诊断首先应用于小规模线性单变量系统,随后逐步向应用于大规模、非线性复杂系统扩展,目前,已在机械、化工、输电网络和航空航天等领域都得到了成功的应用。
基于模糊理论的故障诊断方法主要有基于模糊聚类的方法、基于模糊模型的方法,以及模糊理论与其他方法相结合。
1)基于模糊聚类的方法。
聚类是指将一个数据点集合中的各元素,以某种相似程度作为度量指标,分别指定不同的类别标号。模糊聚类的典型方法有模糊C-均值聚类(Fuzzy C-Means clustering,FCM)。FCM 是用隶属度来确定每个数据点属于某个聚类程度的一种聚类算法。FCM 是将n个数据向量分为c个模糊类,求得每组的聚类中心,并以相似性指标为目标函数,使之达到最小。FCM 与普通分类的区别就在于FCM 用模糊划分,使得每个给定数据点用一个在[0,1]区间的隶属函数来确定其属于各个类的程度。也就是说,某一个数据点属于某个类的程度值可以从0 到1 逐渐过渡,而不像以前那样要么是0 要么是1。隶属度矩阵U的元素在[0,1]上取值,与引入的模糊划分相对应。一般而言,一个优化的模糊划分应具有尽可能大的类间分离度和尽可能小的类内紧致度。
谢涛等[14]研究了模糊模式识别技术在液体火箭发动机故障诊断中的应用,其使用最大隶属度原则的模糊聚类方法,用以识别火箭发动机故障模式。Joentgen等[15]提出了一种基于改进型可能性C-均值聚类和故障向量理论的故障诊断方法,可以实现对在线检测中出现的未知类型故障的诊断。此外,谢涛等[16]研究了一种基于模糊熵与方向相似度的液体火箭发动机故障检测方法,通过试车数据模糊聚类中心矢量方向相似度的变化来检测发动机系统的故障,并采用基于广义模糊熵的模糊Koho⁃nen 聚类网络作为滑动数据窗口上的聚类算法,从而提高了故障检测算法对强干扰噪声的鲁棒性[17]。
2)基于模糊模型的方法。
基于模糊模型的故障检测与诊断方法,其基本思想是:将研究对象看成一个黑箱,使用其历史数据或其他知识,建立一个模糊辨识模型来模拟对象的系统输入输出关系,再将模型输出与实际系统输出相比较,以实现故障的检测与诊断。
Takagi 和Sugeno 在1985年提出用数学工具建立系统的模糊模型,称为T-S 模糊模型。尽管相比于人类主观上的语言条款规则,T-S 模糊模型的直观性下降,但其优势同样也很明显,主要包括:对于非线性系统,T-S 模糊模型可以在运行状态点附近建立一个线性模型,局部逼近目标系统;在不同的系统运行区间,通过对运行状态点定义不同的前提集,可以使T-S 模糊模型能够全区间逼近目标系统。对此,Wang[18]于1992年首次给出了万能逼近定理,证明了T-S 模糊系统能够以任意精度逼近紧集上的连续实值函数。
T-S 模糊推理系统一般使用乘积推理机、单值模糊化、中心平均解模糊化和高斯隶属度函数的方式来构造,其能够以任意精度模拟一个确定的系统。在此基础上,蔡开龙等[19]将基于T-S 模糊模型的故障诊断方法应用于航空发动机,以判定某涡扇发动机的健康状况。刘鑫蕊[20]将模糊模型应用于非线性互联大系统的H∞控制。Zheng等[21]和Lyu等[22]深入研究了T-S 模糊系统的鲁棒稳定性以及可靠控制问题,研究了几类模糊系统的稳定性及鲁棒可靠控制问题。同时,模糊聚类对于模糊建模也有帮助。例如,Huang等[23]研究了一种新的基于模糊聚类快速建立知识模型的故障诊断方法。Palade等[24]将模糊聚类结合故障诊断模型,用于粗糙数据建模。
3)模糊理论与其他方法相结合。
由于基于模糊理论的方法易于利用专家的经验和知识,适用于难以建立精确数学模型的系统,而神经网络方法具有学习能力强等特点,并在知识的获取、规则的学习以及模型的修正方面具有优势。因此,将模糊方法与神经网络、专家系统等方法相结合,可以发挥各种方法的优势,从而更有效地实现液体火箭发动机的故障检测与诊断。
艾延廷[25]应用模糊数学为故障诊断专家系统建立诊断矩阵,确立故障征兆与故障成因间的隶属关系,建立了火箭发动机的故障诊断专家系统。Wu[26]将模糊理论与支持向量机结合,提出基于模糊支持向量机的故障诊断方法,并对4 种典型的转子故障进行了模拟与诊断。2015年,李吉成[27]研究了发动机剩余子系统基于模糊聚类与神经网络的建模方法,充分利用了聚类算法与神经网络算法的优点,进一步提高了建模的精度,并依据所建模型,结合试车数据验证了基于该模型的故障隔离方法。
综合上文的分析可知,基于数据驱动的方法和基于人工智能的方法本质上都是不直接利用研究对象的数学模型,而是在一定程度上将研究对象作为一个黑箱来处理。这两种方法的优点在于计算的简单性和对专家经验知识等表示的直观性,但其强烈地依赖于数据信息和经验知识,而且对于超出专家系统规则库或数据统计规律的未知故障类型或模式,容易出现误检或误诊。
2 液体火箭发动机健康监控系统
从液体火箭发动机健康监控技术诞生至今,全球主要航天国家都高度重视液体火箭发动机健康监控系统的研究和开发。事实上,健康监控系统已成为研制新型发动机和改进现有推进系统不可缺少的关键组成部分。图1为液体火箭发动机健康监控系统的功能框图。
20 世纪70年代以来,为了降低SSME等液体火箭发动机故障的影响,提高航天飞行的可靠性与安全性,NASA 每年都会增加在健康监控科研与项目管理财政预算方面的投入,并相继研制了多个发动机健康监控系统。近年来,在集成空间运输计划(Integrated Space Transportation Plan,ISTP)[28]的指导下,NASA 已在深入开展先进健康监控技术的研究和系统的研制。
此外,俄罗斯针对RD-170 研制了健康监测、寿命评估与预测系统[29];德国在20 世纪90年代开发了基于模式识别的专家诊断系统[30],用来对液体火箭发动机进行故障诊断;欧洲航天局在提出的未来运载火箭技术方案中,将发动机的健康监控列为重要研究项目[31];日本在H-2 液体火箭发动机的健康监控方面加大了研发力度[32]。
美国在这方面的投入和取得的成绩尤为显著。图2为美国进行液体火箭发动机健康监控系统研究的发展历程。可以明显看出,其发展历程可以概括为“3 个阶段,1 条主线”。
发动机健康监控系统发展的“3 个阶段”为:
1)初级阶段。始于20 世纪70年代初,美国对Atlas、Titan等一次性使用的发动机进行关键参数上下限控制,开创了健康监控技术在液体火箭发动机领域的应用先例。其中又以研制成功的SSME工作参数“红线阈值检测与报警”系统为代表。但该类系统方法相对较为简单(使用固定的红线阈值方法),功能也比较单一(只具有故障检测功能)。
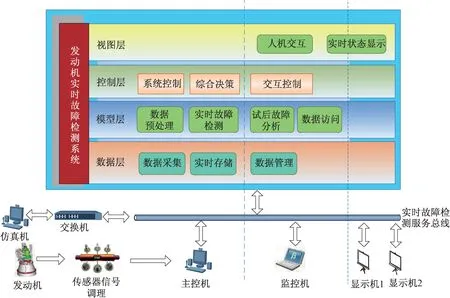
图1 液体火箭发动机健康监控系统功能框图Fig.1 Functional block diagram of the health monitoring system of a liquid rocket engine

图2 美国健康监控系统发展历程Fig.2 Development history of the health monitoring system of the United States of America
2)中级阶段。以对上一阶段系统功能的提升和工程实用化、方法性能的改进为目标,其代表是20 世纪80年代中期研制的用于SSME 地面试车监控 的SAFD(System of Anomaly and Fault Detec⁃tion)系统。该系统显著加强了红线阈值监控的检测能力。
3)高级阶段。在空间运载计划和ISTP 指导下,美国相继开展了多个先进健康监控或健康管理系统的研究和开发,包括健康监控系统(Health Monitoring System,HMS)、火箭发动机健康管理系统、集成健康监控系统、智能控制系统(Intelligent Control System,ICS)、智能集成管理系统[33-34]等多种系统框架或方案。此外,还包括美国GENSYM公司多年来发展和不断持续改进的火箭发动机实时诊断系统开发平台G2等[35]。
贯穿液体火箭发动机健康监控系统发展过程的“1 条主线”——集成化、平台化、工程实用化,液体火箭发动机健康监控系统的工程实用化毋庸置疑。健康监控系统研制的最终目的就是应用到发动机的研制、试验和实际运行中,发挥其提高发动机可靠性和安全性的最大效益。有关平台化的问题,下文将结合典型健康监控系统进行具体分析。液体火箭发动机健康监控系统的集成化主要包含了3 个层次的含义:第1 个层次为功能的集成,包括集成故障检测与隔离、故障预测与预报、寿命估计、维修计划等诸多功能,使发动机健康监控的内涵和功能进一步扩展,从单一的监控向综合健康管理迈进;第2 个层次为方法的集成,包括集成基于规则、基于统计、基于模型等方法,提高系统检测与诊断的能力;第3 个层次为专用传感测量与诊断技术的集成,如识别SSME 轴承和燃烧室等关键结构部件故障的羽流光谱技术、监测涡轮叶片温度分布及其健康情况的光学高温测量技术等[36]。
下面以美国为例,结合其典型健康监控系统进行分析。
1)RCS(Redline Cut-off System)。20 世纪70年代研制的红线关机系统(RCS)[37-38]是液体火箭发动机健康监控系统的应用先例。其能对SSME 高压涡轮泵的5 个参数(高压燃料涡轮泵出口温度、高压氧化剂涡轮泵出口温度、高压燃料涡轮泵冷却剂入口温度、高压氧化剂涡轮泵介质密封吹除压力、高压氧化剂涡轮泵二级涡轮密封压力)的红线值进行实时监控,且无需数学模型,计算量小。但该系统对传感器的要求较高,不能及时准确检测发动机工作过程中的早期故障和缓变故障,故障覆盖面有限,鲁棒性差,可靠性较低。
2)SAFD。20 世 纪80年代末期研制的SAFD[39]是早期发动机健康监控系统的典型代表,其先进的设计理念一直为后续先进健康监控系统的研制所借鉴。该系统的最大特点是初步体现了健康监控系统集成化和平台化的设计思想。基于将硬件、软件平台和算法操作平台有效区分的系统架构设计,系统的扩展性、移植性和可用性都得到了很大程度的增强。其中软件平台主要完成对所有算法通用的功能,包括输入/输出、标定、时序安排、记录、显示和用户接口等。算法操作平台则有效集成了多种算法实现并行运行,并采用冗余设计和表决报警技术,提高了故障检测能力。这样,一方面系统底层的任意改动都对上层透明;另一方面系统无需进行软件或硬件的改动就可以进行算法的升级或应用新的算法。但该系统仅适用于SSME稳态工作过程,故障的覆盖率、敏感度和鲁棒性仍较低。
3)PTDS(Post Test Diagnostic System)。20世纪90年代初期研制的SSME 高压氧化剂涡轮泵试车后故障诊断系统PTDS、1994年研制的应用于Atlas/Centaur中 的PTDS 和1998—2001年研制的应用于X-33 主推进系统的PTDS[28],是液体火箭发动机健康监控系统首个基于集成化和平台化的思想实现系列化的重要代表。在集成化方面,该系统一方面集成了多种数据分析、传感器验证与重构方法,用于对发动机试车后的大量实验数据进行分析,以确定发动机的运行状态;另一方面,系统通过提供与众多信息源的标准接口,有效集成数据处理和分析过程中所需要的大量数据信息、知识,自动完成发动机试验后及飞行后的状态检测与诊断。在平台化方面,该系统基于模块化的分解设计思想,将系统4 大功能模块(智能化知识系统、应用支持模块、部件级分析模块、对话/信息管理模块)的各子模块都分解为“核心通用模块-特定发动机专用模块”的组合,而且核心通用模块可被继承和复用。因而,该系统具有较强的通用性和扩展性,不仅可有效实现功能模块的积木拼搭式组合和系统的快速组建,而且实现了与具体发动机对象的松耦合。
4)ICS。20 世纪90年代初期以来,LeRC 根据SSME 多年的试验和使用经验所研制的ICS,实现了两个方面的集成。在系统功能方面,ICS 实现了发动机多变量基本控制(推力、混合比、涡轮泵转速、高压涡轮燃气温度、高压泵进口压力)同故障检测和诊断的有机集成。系统不仅可以完成发动机的故障检测、诊断和基本控制功能,还可以预测发动机的寿命,给出维修计划建议。在算法方面,ICS结合了基于模型、基于规则的故障检测与诊断算法。但由于难以建立完善的发动机诊断模型和控制规则库,因而该系统目前只能对故障模式、故障检测与诊断算法、闭环多变量控制等进行仿真研究。
5)HMS。HMS 由联合技术研究中心(UTRC)研制。该系统是液体火箭发动机健康监控系统集成化、平台化和工程实用化思想的真正集大成者。在平台化方面,系统采用了层次化和模块化的架构设计,通过将系统功能结构划分为3 个层次、6 大模块,实现层与层之间以及层内各模块之间的松耦合和可组合性。HMS 是一个适应性和可扩展性都很强的健康监控系统平台,能快速有效适应SSME 结构的更改。系统的3 个层次包括底层传感器信息处理、中间层故障检测与诊断算法、顶层综合决策,6大功能模块分别为系统任务管理、健康监控、试验数据记录、离线数据分析、数据库管理和系统通信。在集成化方面,HMS 在系统功能结构各个层次均实现了与传感器技术、故障检测算法的有机综合。在底层,系统有效集成了先进测量传感器技术(包括羽流光谱仪、声发射传感器、光纤挠度计、光纤高温计、激光振动传感器等),及时详细地获取发动机涡轮泵、轴承等关键部件的健康状态信息,有效检测识别腐蚀、涡轮叶片与轴承磨损、泄漏等故障。在中间层,系统首先综合运用非线性回归、时间序列和聚类分析等多重故障检测算法,对传感器输入信号进行计算,然后对各种算法的结果进行交叉检查验证,综合评定发动机特定部件的健康情况。在顶层,系统则通过组合各部件的状态来确定发动机的整体健康状态,并作出是否关机的融合决策,减少误报警率。在工程实用化方面,该系统在研制之初就制定了详细的工程应用计划,计划5年内应用于地面试验,随后过渡到飞行系统。
6)先进健康管理系统(Advanced Health Man⁃agement System,AHMS)。AHMS 于2004年由波音-加州诺加帕克公司联合MSFC 研制[35,40-41]。该系统基于开放式结构设计的箭载健康管理计算机集成了实时振动监控RTVMS、光学羽流异常检测和基于线性发动机模型的3 个实时故障检测子系统,有效提高了SSME 发射、升空阶段的可靠性和安全性。AHMS 不仅可以通过振动信号实时监测高压涡轮泵的状态,而且可以通过调节发动机燃料、氧化剂的流量大小和混合比实现对发动机工作状态的控制,算法的灵活性和可扩展性强。研究表明,针对Block II 型SSME 所研制开发的先进健康管理系统AHMS[40,42],可以有效降低航天飞机的升空损失概率并提高航天任务的成功概率[35,43],其在降低航天飞机升空损失概率方面的效果甚至优于型号本身改进的效果,如图3 所示。

图3 AHMS 对航天运载器升空损失的影响Fig.3 Effects of the AHMS on the launch losses of space vehicles
图4 和图5 分别给出了AHMS 在SSME中的应用情况以及箭载健康管理计算机的功能结构。

图4 AHMS 在SSME中的应用Fig.4 Application of the AHMS in the SSME
3 液体火箭推进系统健康监控技术的演变趋势
液体火箭发动机健康监控技术有了明显的进步,已经在液体火箭发动机地面试车监控、飞行过程监控和事后健康评估方面得到了成功应用,但由于健康监控涉及众多复杂的技术问题,目前的科技水平尚不能完全解决这些问题,并且航天技术的进一步发展也对健康监控系统提出了更高的要求。
从当前的研究进展、需要解决的问题以及需求来看,近期液体火箭发动机健康监控技术的演变趋势:1)提高故障检测与诊断算法的快速性、可靠性;2)发展在硬件上不降低发动机固有可靠性的专用传感器技术;3)故障检测与诊断系统的自动化、局部通用化,健康监控系统的集成化、智能化。
液体火箭发动机健康监控技术是包括计算机技术、自动控制技术、人工智能技术、传感器技术与发动机技术在内的多学科交叉的高新技术领域,随着载人航天等一系列航天技术的发展与应用,液体火箭发动机健康监控技术的研究与应用将具有越来越重要的意义。
