基于多目视觉的工业机器人应用
2020-02-21王宝

摘要:本文通过说明基于多目视觉的工业机器人系统整体设计方案,探究了全局单目视觉目标检测和定位,分析了手上双目立体视觉三维定位和轨迹规划,从而有效提升多目视觉下工业机器人系统应用的总体水平。
关键词:多目视觉;工业机器人;PC主机
得益于科学技术的不断进步影响,使得工业机器人得以开发研制出来,对于一些恶劣环境中的工作,工业机器人完全可以替代人类完成,既使工作效率得以提升,又减小了实际的工作任务量。然而,从前的机器人仅可以根据人类设置的程序加以运作,难以达到当前工业化生产发展的需要,智能化工业机器人是未来的发展趋势。此种工业机器人具有很强的适应能力,通过把工业机器人和视觉系统紧密结合到一起,对加快工业机器人的发展速度非常有益。依靠机器人和视觉系统的结合方式,可以完成更多高难度与复杂的动作和问题,达到准确观察周围环境情况的目的,同时加以合理应对。所以,加大基于多目视觉的工业机器人系统应用力度十分关键。鉴于此,系统思考与分析基于多目视觉的工业机器人系统的具体应用方案显得尤为必要,拥有一定的研究意义与实践价值。
1 基于多目视觉的工业机器人系统整体设计方案说明
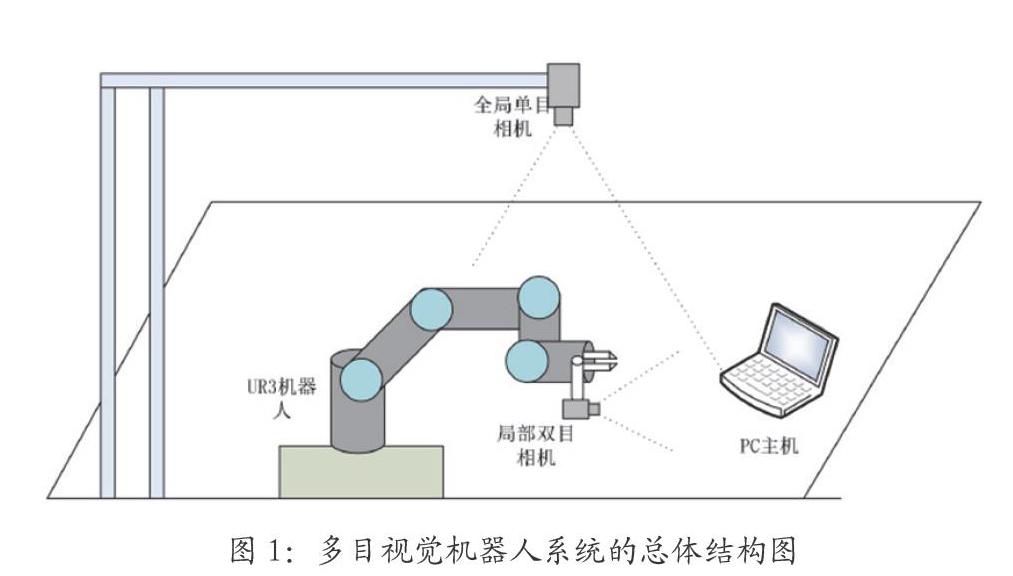
设计多目视觉工业机器人系统的过程当中,通过把固定装设在机器人上边的全局单目相机和固定装设在机械臂末端的局部双目相机有效组合到一起,形成了多目视觉,以便指引工业机器人进行准确操控[1]。总体结构图见图1。
由图1当中能够获悉,多目视觉可以指引机器人进行运动,具体的流程是:全局单目相机针对目标物实施初期定位处理,把目标物的具体位置及时发送到相应PC主机;然后PC主机会对机械臂进行控制,使其能够移动到目标物的周围,借助机械臂末端的局部双目相机,能够准确定位目标物,同时把详细的位置信息传送到PC主机,由其对机械臂进行控制,完成操控目标物的任务[2]。
1.1 相机的标定说明
首先应该明确空间当中具体的点和图像当中像素点的对应关系,并进行相机的内、外参标定。运用科学的张正友标定算法,借助移动棋盘,采用不一样的视角、高度的棋盘图像,达到科学标定目标物的效果。
1.2 手眼的标定说明
(1)全局单目相机的眼在手外标定。借助眼在手外的相机固定形式,让相机和机器人基座之间的位置关系能够固定,并选择棋盘格上的某一个固定角点构建坐标系,并且对机器人机械臂末端相应的位姿进行读取,完成拍摄目标物的任务。
(2)局部双目相机的眼在手上标定,把相机装设到机器人的机械臂的手上,借助恒定旋转的手眼标定算法,能够得到相机和机械臂末端间存在的固定转换关系。
1.3 双目的标定说明
运用双目相机进行不同相机的内参系数标定,同时对右摄像头针对于左摄像头的平移参数和旋转参数加以科学标定,应用Opencv下的双目标定算法实施标定,进而得到最优的双目标定数值。
2 全局单目视觉目标检测和定位探究
2.1 SURF模版匹配下的目标物识别和定位分析
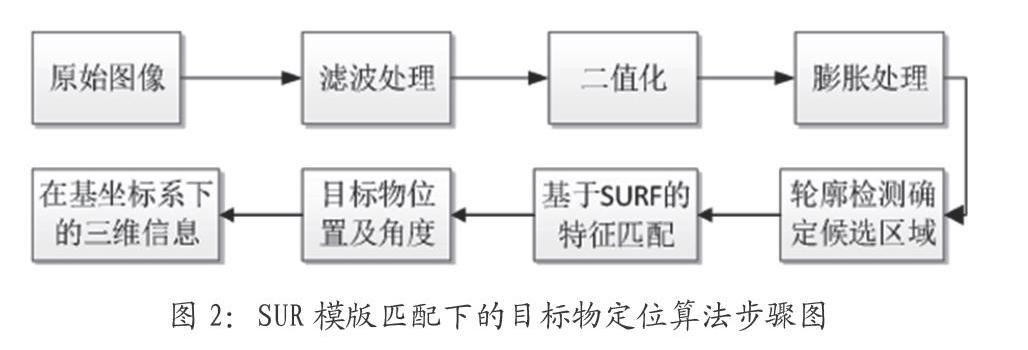
当完成单目相机的图像采集结束后,应该科学处理图像,获得目标物处于图像当中的位置,有助于基于特征点的模版匹配算法获取良好的运用成效,可以精准定位目标物处于图像中的方位,计算出目标物的具体三维信息。具体步骤见图2。
2.1.1 利用图像科学处理算法
应用相机进行图像拍摄的过程当中,易于被不同环境方面的因素干扰,致使图片的质量不符合相关要求。所以,开展提取特征和识别之前,应该科学处理图像。利用此项措施,可以使成像过程中形成的噪声得以消失,在图像中体现出要测定的部分,使后期处理的效率得以提高,保证了特征提取和识别的科学性。
2.1.2 做好实验分析工作
基于对算法稳定性验算的目的,此次研究以各个目标物作为对象加以测试,依次制作出相应的模版,借助特征点提取的模版匹配算法可以準确匹配和识别其中的图像,然后对识别成功次数进行正确记录,具体的统计情况见表1。
对检测识别错误的图片进行科学分析,错误产生的原因为相机应用的光源属于室内较为昏暗的自然光,导致目标物的边缘处于某种状况时较为模糊,造成目标物的轮廓提取产生了一定的偏差问题,也造成了匹配的错误。经过科学处理相机光源之后,需要科学加以处理。测定误差的形式为:将机械臂基坐标系当成基础坐标系,把目标物表面中心的坐标P neat减去算法计算得到的目标物坐标Pw,得出误差P erro。开展数次实验,把Perror进行求和之后取平均,获得不同方向的平均误差。具体的平均误差见表2。
对误差进行分析得知,目标物到相机的深度信息测定不够准确,人工测量误差无法规避。从表2获悉,全局单目相机下的定位难以达到多目视觉机器人系统的定位需要,所以,需运用局部双目视觉进行定位。
2.2标志物下的目标物定位分析
利用标志物的定位方法进行实验当中颗粒物检测机的定位工作,对轨迹规划十分有利。因为颗粒物检测机自身结构十分复杂、模块很多,应粘贴标志物在颗粒物检测机的上面,见图3。
鉴于颗粒物检测机自身的机械结构是固定的,在获取标志物的具体三维坐标之后,能够推导出颗粒物检测机的上下料口、控制按钮详细的空间信息。通过对机械臂进行控制,使其移动到颗粒物检测机的控制按钮处的位置,当误差<3mm时判定成功,记录成功的次数。持续改变颗粒物检测机放置的位置,开展多次实验,最后的实验结果见表3。
对之前失败的实验进行仔细分析后,得知原因为处于相应极端时,光线受到颗粒物检测机的遮挡影响,导致标志物出现显著的明暗改变,造成其难以得到检测,出现定位错误的现象。并整理了定位误差数据,获取平均误差见表4。
3 手上双目立体视觉三维定位和轨迹规划的分析
3.1 多目立体视觉三维定位的说明
将多目视觉的工业机器人运动当作参考和支撑,可以准确得到目标物的具体三维信息情况,完成左右视图的图像处理任务,并以双目立体视觉三维重建原理当作有效依据,得到目标物处于左相机坐标系下的具体空间坐标,进而明确机器人基坐标系下的实际空间位置。详细的步骤是:左视图一一图像的处理一一目标物位于图像当中的具体方位、角度;左右视图一一立体校正处理一一立体匹配一一形成视差图;最后形成点云图,得到目标物的具体三维坐标。运用两个相机拍摄相同物体,使空间当中的定点映射处于各个角度之下的图像投影点能够相匹配,形成视差图,完成物体空间三维的重建任务。一般的立体匹配算法涵盖了针对区域的立体匹配算法、针对特点的立体匹配算法、针对相位的立体匹配算法。在此过程当中,可以结合相应的匹配基元处于左右视图内搜索的匹配点,借助极线约束的作用,达到减少匹配视觉的效果,使匹配效率得以提升。當完成立体匹配以后,获悉目标点的详细信息,达到目标物三维重建的目的,形成空间的三维信息。
3.2 针对机器人运动轨迹规划的分析
根据有关机器运动学原理,能够掌握机械臂不同关节的运动和机器人末端位姿之间存在的关联,并对接触目标物过程中机械臂不同关节的转动角度、移动距离进行精准计算。基于对机械臂运动有效控制,使其更加安全的目的,应该做好机器人运动轨迹的规划工作,一般处于机器人关节空间当中运用插值方式能够完成轨迹规划的任务,并将机器人的运动路径上结点的具体空间位置信息当作参考,构建方程进行求解,让机器人能够迅速地从起点到终点进行运动。一般而言,能够运用三类不同的插值方法完成对机器人关节空间内的插补计算任务。
4 结论
从此次论文的阐述与分析当中,可以获知,系统分析和思考基于多目视觉的工业机器人系统的具体应用方案显得尤为必要,具有一定的研究意义与实践价值。本文通过说明基于多目视觉的工业机器人系统整体设计方案,探究了全局单目视觉目标检测和定位,分析了手上双目立体视觉三维定位和轨迹规划:多目立体视觉三维定位的说明、针对机器人运动轨迹规划的分析。希望此次研究和分析的内容与结果,能够得到有关多目视觉的工业机器人系统相关设计工作人员的关注和重视,并且从中获取到相应的启发与帮助,以便增强基于多目视觉的工业机器人系统应用的实际成效,进而推动我国基于多目视觉的工业机器人系统的不断发展与进步。
参考文献
[1]李静轩,顾祥.多目视觉下的工业机器人应用研究[J].计算机产品与流通,2020,175 (102):126-12 8.
[2]卓书芳,基于机器视觉的工业机器人分拣技术应用研究与系统开发[J],辽宁科技学院学报,2019,123 (151):123-128.
作者简介
王宝(1986-),男,山东省禹城市人。硕士研究生,助教。研究方向为机电一体化。
